 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTo Coalesce or to Repel? An Analysis of MHT, JPDA, and Belief Propagation Multitarget Tracking Methods
Aug 11, 2023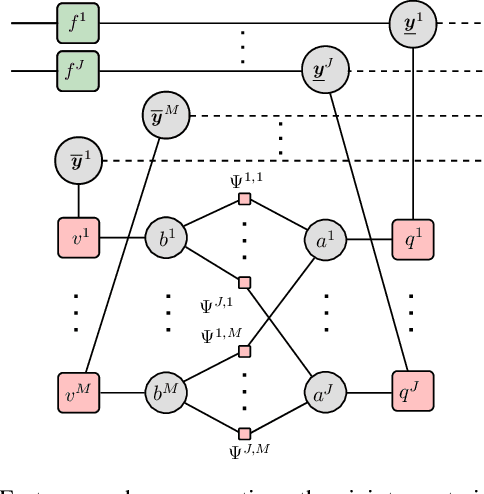
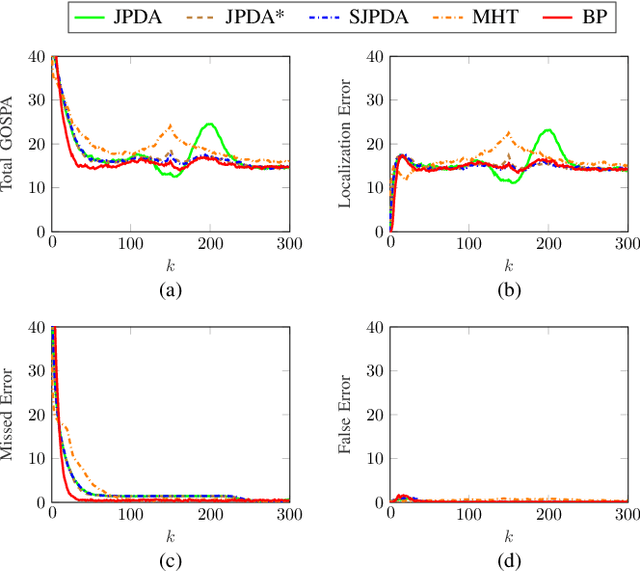
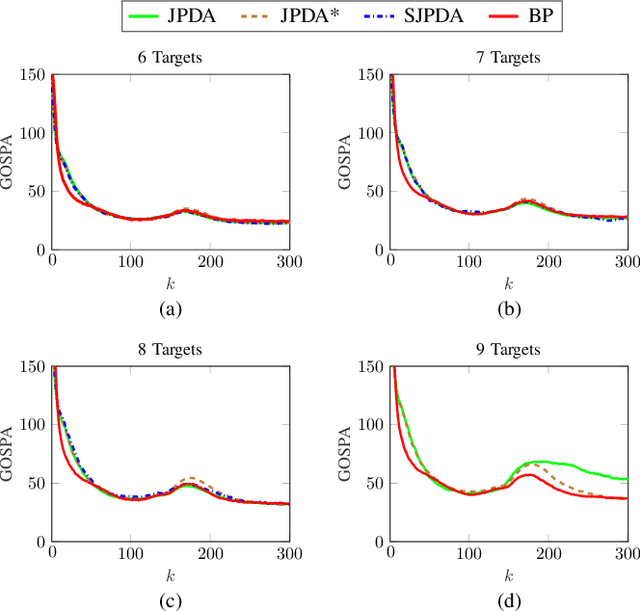
Joint probabilistic data association (JPDA) filter methods and multiple hypothesis tracking (MHT) methods are widely used for multitarget tracking (MTT). However, they are known to exhibit undesirable behavior in tracking scenarios with targets in close proximity: JPDA filter methods suffer from the track coalescence effect, i.e., the estimated tracks of targets in close proximity tend to merge and can become indistinguishable, and MHT methods suffer from an opposite effect known as track repulsion. In this paper, we review the JPDA filter and MHT methods and discuss the track coalescence and track repulsion effects. We also consider a more recent methodology for MTT that is based on the belief propagation (BP) algorithm, and we argue that BP-based MTT exhibits significantly reduced track coalescence and no track repulsion. Our theoretical arguments are confirmed by numerical results.
Fusion of Probability Density Functions
Feb 23, 2022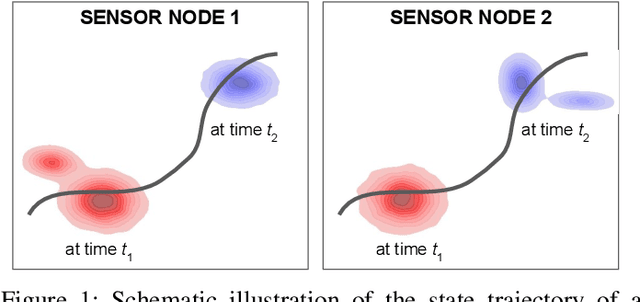
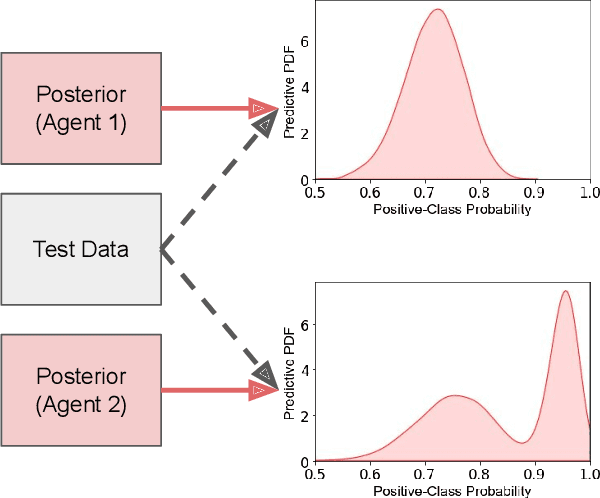
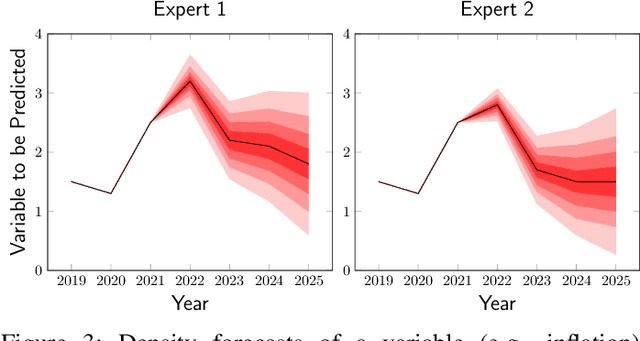
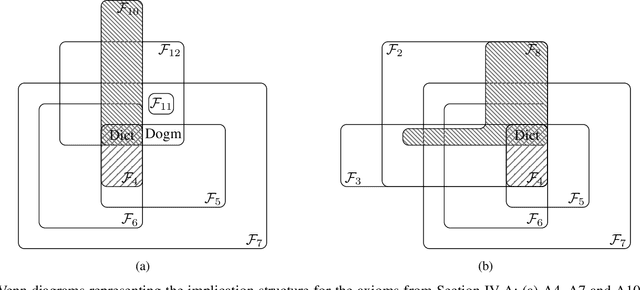
Fusing probabilistic information is a fundamental task in signal and data processing with relevance to many fields of technology and science. In this work, we investigate the fusion of multiple probability density functions (pdfs) of a continuous random variable or vector. Although the case of continuous random variables and the problem of pdf fusion frequently arise in multisensor signal processing, statistical inference, and machine learning, a universally accepted method for pdf fusion does not exist. The diversity of approaches, perspectives, and solutions related to pdf fusion motivates a unified presentation of the theory and methodology of the field. We discuss three different approaches to fusing pdfs. In the axiomatic approach, the fusion rule is defined indirectly by a set of properties (axioms). In the optimization approach, it is the result of minimizing an objective function that involves an information-theoretic divergence or a distance measure. In the supra-Bayesian approach, the fusion center interprets the pdfs to be fused as random observations. Our work is partly a survey, reviewing in a structured and coherent fashion many of the concepts and methods that have been developed in the literature. In addition, we present new results for each of the three approaches. Our original contributions include new fusion rules, axioms, and axiomatic and optimization-based characterizations; a new formulation of supra-Bayesian fusion in terms of finite-dimensional parametrizations; and a study of supra-Bayesian fusion of posterior pdfs for linear Gaussian models.
Fusion of Sensor Measurements and Target-Provided Information in Multitarget Tracking
Nov 26, 2021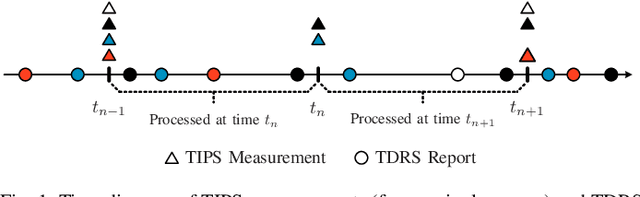
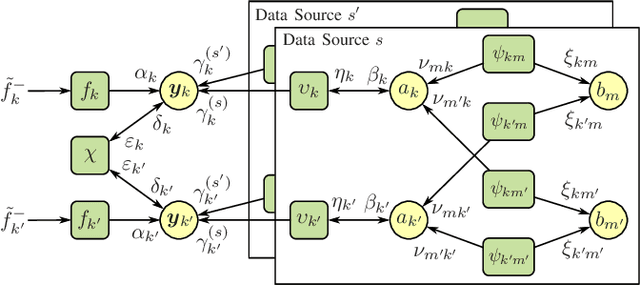
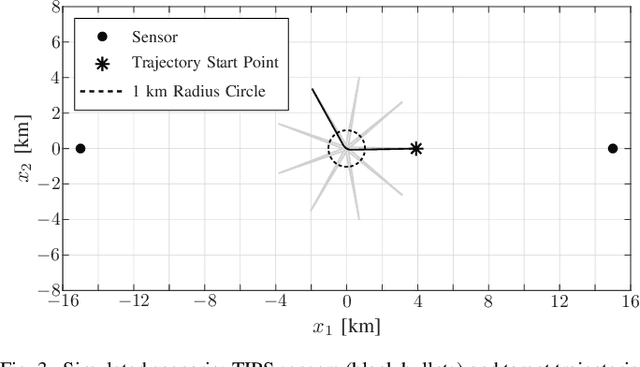
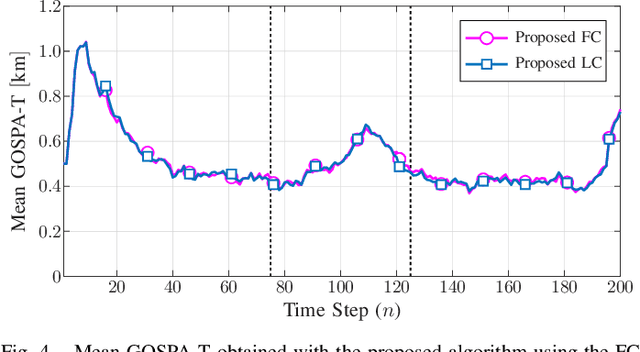
Tracking multiple time-varying states based on heterogeneous observations is a key problem in many applications. Here, we develop a statistical model and algorithm for tracking an unknown number of targets based on the probabilistic fusion of observations from two classes of data sources. The first class, referred to as target-independent perception systems (TIPSs), consists of sensors that periodically produce noisy measurements of targets without requiring target cooperation. The second class, referred to as target-dependent reporting systems (TDRSs), relies on cooperative targets that report noisy measurements of their state and their identity. We present a joint TIPS-TDRS observation model that accounts for observation-origin uncertainty, missed detections, false alarms, and asynchronicity. We then establish a factor graph that represents this observation model along with a state evolution model including target identities. Finally, by executing the sum-product algorithm on that factor graph, we obtain a scalable multitarget tracking algorithm with inherent TIPS-TDRS fusion. The performance of the proposed algorithm is evaluated using simulated data as well as real data from a maritime surveillance experiment.
An Efficient Labeled/Unlabeled Random Finite Set Algorithm for Multiobject Tracking
Sep 11, 2021
We propose an efficient random finite set (RFS) based algorithm for multiobject tracking in which the object states are modeled by a combination of a labeled multi-Bernoulli (LMB) RFS and a Poisson RFS. The less computationally demanding Poisson part of the algorithm is used to track potential objects whose existence is unlikely. Only if a quantity characterizing the plausibility of object existence is above a threshold, a new LMB component is created and the object is tracked by the more accurate but more computationally demanding LMB part of the algorithm. Conversely, an LMB component is transferred back to the Poisson RFS if the corresponding existence probability falls below a threshold. Contrary to existing hybrid algorithms based on multi-Bernoulli and Poisson RFSs, the proposed method facilitates track continuity and implements complexity-reducing features. Simulation results demonstrate a large complexity reduction relative to other RFS-based algorithms with comparable performance.
A Belief Propagation Algorithm for Multipath-Based SLAM
Dec 10, 2018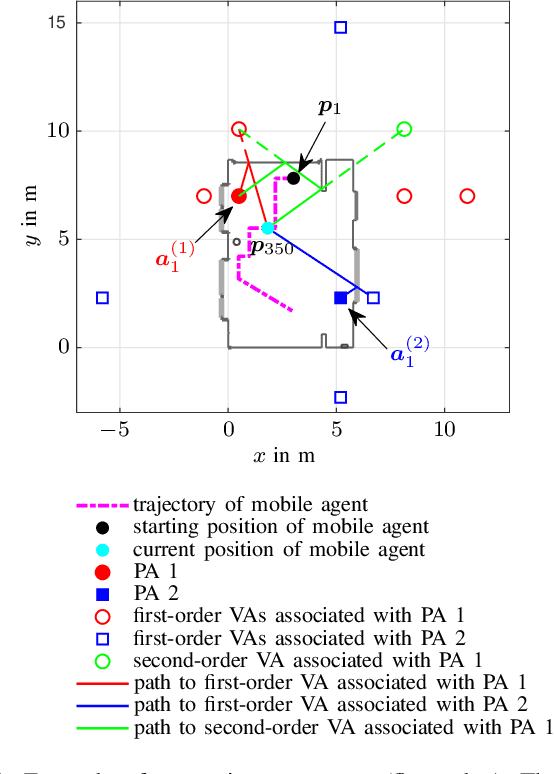
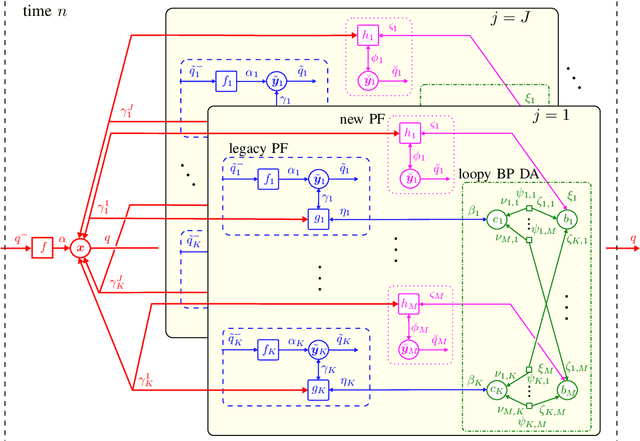
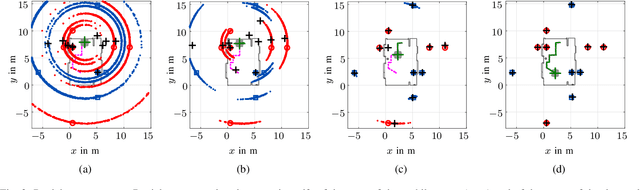
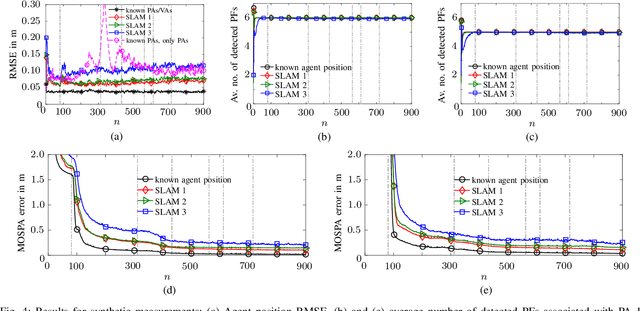
We present a simultaneous localization and mapping (SLAM) algorithm that is based on radio signals and the association of specular multipath components (MPCs) with geometric features. Especially in indoor scenarios, robust localization from radio signals is challenging due to diffuse multipath propagation, unknown MPC-feature association, and limited visibility of features. In our approach, specular reflections at flat surfaces are described in terms of virtual anchors (VAs) that are mirror images of the physical anchors (PAs). The positions of these VAs and possibly also of the PAs are unknown. We develop a Bayesian model of the SLAM problem including the unknown MPC-VA/PA association. We represent this model by a factor graph, which enables the use of the belief propagation (BP) scheme for efficient marginalization of the joint posterior distribution. The resulting BP-based SLAM algorithm detects the VAs associated with the PAs and estimates jointly the time-varying position of the mobile agent and the positions of the VAs and possibly also of the PAs, thereby leveraging the MPCs in the radio signal for improved accuracy and robustness of agent localization. A core aspect of the algorithm is BP-based probabilistic MPC-VA/PA association. Moreover, for improved initialization of new VA positions, the states of unobserved potential VAs are modeled as a random finite set and propagated in time by means of a "zero-measurement" probability hypothesis density filter. The proposed BP-based SLAM algorithm has a low computational complexity and scales well in all relevant system parameters. Experimental results using both synthetically generated measurements and real ultra-wideband radio signals demonstrate the excellent performance of the algorithm in challenging indoor environments.
Compressive Nonparametric Graphical Model Selection For Time Series
Mar 08, 2014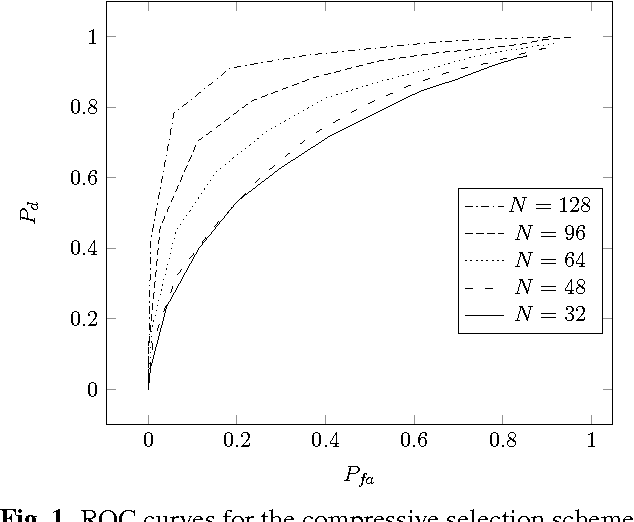
We propose a method for inferring the conditional indepen- dence graph (CIG) of a high-dimensional discrete-time Gaus- sian vector random process from finite-length observations. Our approach does not rely on a parametric model (such as, e.g., an autoregressive model) for the vector random process; rather, it only assumes certain spectral smoothness proper- ties. The proposed inference scheme is compressive in that it works for sample sizes that are (much) smaller than the number of scalar process components. We provide analytical conditions for our method to correctly identify the CIG with high probability.
Sigma Point Belief Propagation
Nov 17, 2013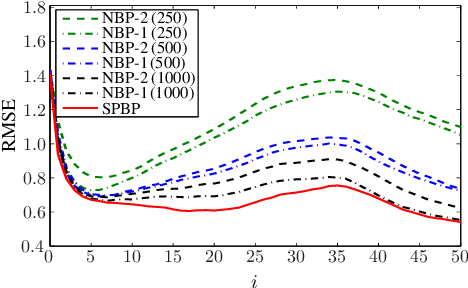
The sigma point (SP) filter, also known as unscented Kalman filter, is an attractive alternative to the extended Kalman filter and the particle filter. Here, we extend the SP filter to nonsequential Bayesian inference corresponding to loopy factor graphs. We propose sigma point belief propagation (SPBP) as a low-complexity approximation of the belief propagation (BP) message passing scheme. SPBP achieves approximate marginalizations of posterior distributions corresponding to (generally) loopy factor graphs. It is well suited for decentralized inference because of its low communication requirements. For a decentralized, dynamic sensor localization problem, we demonstrate that SPBP can outperform nonparametric (particle-based) BP while requiring significantly less computations and communications.