 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProbabilistic Occupancy Grid for Radio-Based SLAM
Mar 03, 2026Sensing is an integral part of 6G and beyond systems, providing exceptional environmental perception along with communication. RF-based sensing often relies on simplified geometric assumptions (e.g., point scatterers or planar surfaces) to model specular multipath and keep inference tractable. However, such representations are not physically informative and fail to accurately capture extended objects with complex shapes and properties. This paper presents a probabilistic occupancy grid framework for radio-based simultaneous localization and mapping (SLAM), jointly reconstructing geometric structures and their radio-related properties. The proposed occupancy grid map representation is integrated into a multipath-based SLAM (MP-SLAM) formulation to enable simultaneous mobile-agent localization and environment mapping using multipath measurements. To connect RF measurements with the grid map, a surface model is employed to describe candidate reflection paths, while occupancy grid cell states capture measurement uncertainties and fine--grained geometric details. Object RF-related properties are modeled via reflection coefficients. The proposed framework offers a principled, proof-of-concept approach to physically interpretable radio-based mapping, and simulation results demonstrate accurate reconstruction of geometry and material properties, as well as high-accuracy localization. In addition, the results highlight the potential to use prior occupancy maps obtained from other radio devices or complementary sensors for subsequent map extension and refinement.
Ranging of a Moving Ship Using a Single Acoustic Receiver in Shallow Water
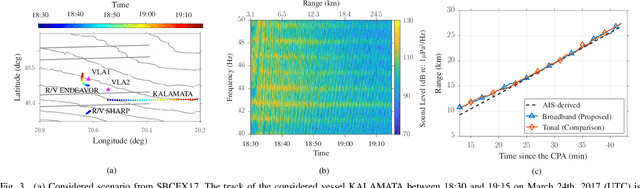
May 02, 2025Passive acoustics is a versatile tool for maritime situational awareness, enabling applications such as source detection and localization, marine mammal tracking, and geoacoustic inversion. This study focuses on estimating the range between an acoustic receiver and a transiting ship in an acoustically range-independent shallow water environment. Here, acoustic propagation can be modeled by a set of normal modes that are determined by the shallow water waveguide and seabed characteristics. These modes are dispersive, with phase and group velocities varying with frequency, and their interference produces striation patterns that depend on range and frequency in single-hydrophone spectrograms. These patterns can often be characterized by the waveguide invariant, a single parameter describing the waveguide's properties. This paper presents a statistical waveguide invariant-based range estimation approach using a single hydrophone, leveraging broadband and tonal sounds from a transiting ship. Using data from the Seabed Characterization Experiment 2017 (SBCEX17), a large commercial ship's radiated acoustic signature within a 7 Hz bandwidth was processed to estimate its range up to 45 km with errors below three percent.
Association-Based Track-Before-Detect with Object Contribution Probabilities
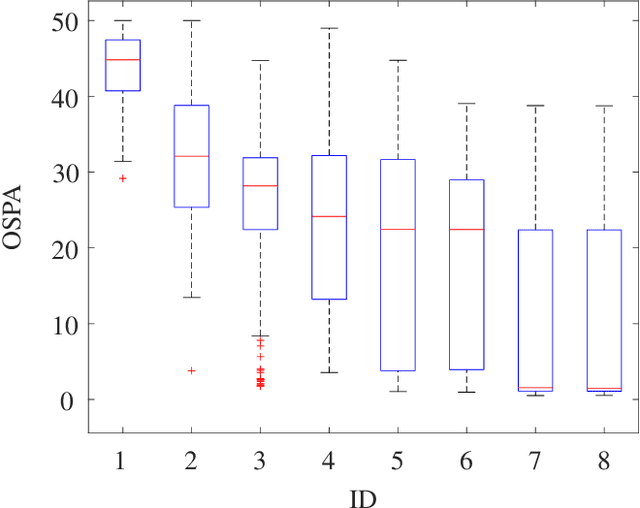
Apr 23, 2025Multiobject tracking provides situational awareness that enables new applications for modern convenience, applied ocean sciences, public safety, and homeland security. In many multiobject tracking applications, including radar and sonar tracking, after coherent prefiltering of the received signal, measurement data is typically structured in cells, where each cell represent, e.g., a different range and bearing value. While conventional detect-then-track (DTT) multiobject tracking approaches convert the cell-structured data within a detection phase into so-called point measurements in order to reduce the amount of data, track-before-detect (TBD) methods process the cell-structured data directly, avoiding a potential information loss. However, many TBD tracking methods are computationally intensive and achieve a reduced tracking accuracy when objects interact, i.e., when they come into close proximity. We here counteract these difficulties by introducing the concept of probabilistic object-to-cell contributions. As many conventional DTT methods, our approach uses a probabilistic association of objects with data cells, and a new object contribution model with corresponding object contribution probabilities to further associate cell contributions to objects that occupy the same data cell. Furthermore, to keep the computational complexity and filter runtimes low, we here use an efficient Poisson multi-Bernoulli filtering approach in combination with the application of belief propagation for fast probabilistic data association. We demonstrate numerically that our method achieves significantly increased tracking performance compared to state-of-the-art TBD tracking approaches, where performance differences are particularly pronounced when multiple objects interact.
A Landmark-Aided Navigation Approach Using Side-Scan Sonar
Mar 10, 2025Cost-effective localization methods for Autonomous Underwater Vehicle (AUV) navigation are key for ocean monitoring and data collection at high resolution in time and space. Algorithmic solutions suitable for real-time processing that handle nonlinear measurement models and different forms of measurement uncertainty will accelerate the development of field-ready technology. This paper details a Bayesian estimation method for landmark-aided navigation using a Side-scan Sonar (SSS) sensor. The method bounds navigation filter error in the GPS-denied undersea environment and captures the highly nonlinear nature of slant range measurements while remaining computationally tractable. Combining a novel measurement model with the chosen statistical framework facilitates the efficient use of SSS data and, in the future, could be used in real time. The proposed filter has two primary steps: a prediction step using an unscented transform and an update step utilizing particles. The update step performs probabilistic association of sonar detections with known landmarks. We evaluate algorithm performance and tractability using synthetic data and real data collected field experiments. Field experiments were performed using two different marine robotic platforms with two different SSS and at two different sites. Finally, we discuss the computational requirements of the proposed method and how it extends to real-time applications.
Importance Sampling With Stochastic Particle Flow and Diffusion Optimization
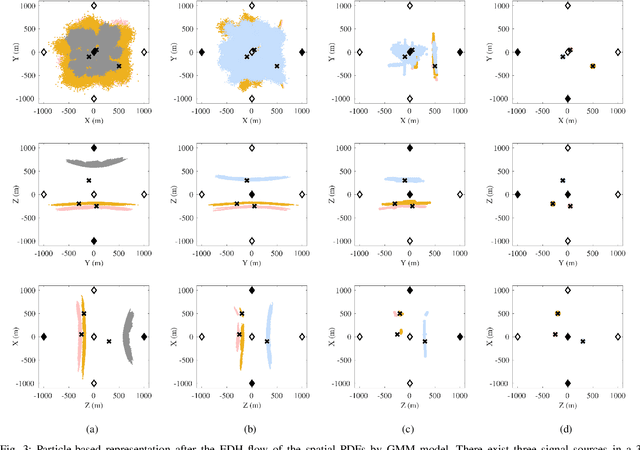
Dec 13, 2024Particle flow (PFL) is an effective method for overcoming particle degeneracy, the main limitation of particle filtering. In PFL, particles are migrated towards regions of high likelihood based on the solution of a partial differential equation. Recently proposed stochastic PFL introduces a diffusion term in the ordinary differential equation (ODE) that describes particle motion. This diffusion term reduces the stiffness of the ODE and makes it possible to perform PFL with a lower number of numerical integration steps compared to traditional deterministic PFL. In this work, we introduce a general approach to perform importance sampling (IS) based on stochastic PFL. Our method makes it possible to evaluate a "flow-induced" proposal probability density function (PDF) after the parameters of a Gaussian mixture model (GMM) have been migrated by stochastic PFL. Compared to conventional stochastic PFL, the resulting processing step is asymptotically optimal. Within our method, it is possible to optimize the diffusion matrix that describes the diffusion term of the ODE to improve the accuracy-computational complexity tradeoff. Our simulation results in a highly nonlinear 3-D source localization scenario showcase a reduced stiffness of the ODE and an improved estimating accuracy compared to state-of-the-art deterministic and stochastic PFL.
A New Statistical Model for Waveguide Invariant-Based Range Estimation in Shallow Water
Dec 03, 2024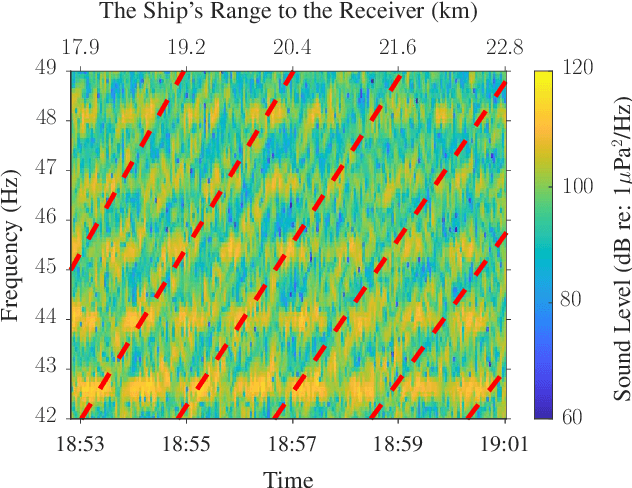
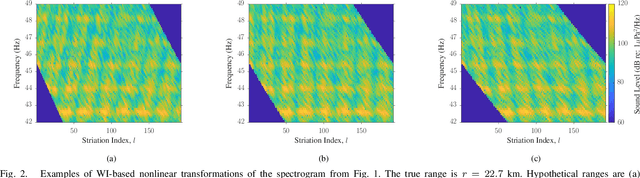
In the undersea environment, positioning is often challenging, and thus, ranging based on passive acoustic data can provide valuable information for subsurface navigation and source localization. We present a range estimation method based on the waveguide invariant (WI) theory that uses ship noise recorded underwater as an acoustic source. The WI is a scalar parameter that describes the interference patterns in spectrograms caused by pairs of modes of acoustic waves propagating in a waveguide, e.g., in shallow water. The WI theory enables ranging using a single receiver without a detailed knowledge of the environment. The machinery of a large ship induces broadband background noise characterized by sets of prominent narrowband tonal signals. We develop a likelihood function for a WI-based range estimation by introducing a statistical model for the broadband component when it dominates over the background noise. The capability of the resulting range estimation method is demonstrated on real acoustic measurements of a moving container ship recorded during the Seabed Characterization Experiment 2017 (SBCEX17).
A New Architecture for Neural Enhanced Multiobject Tracking
Oct 08, 2024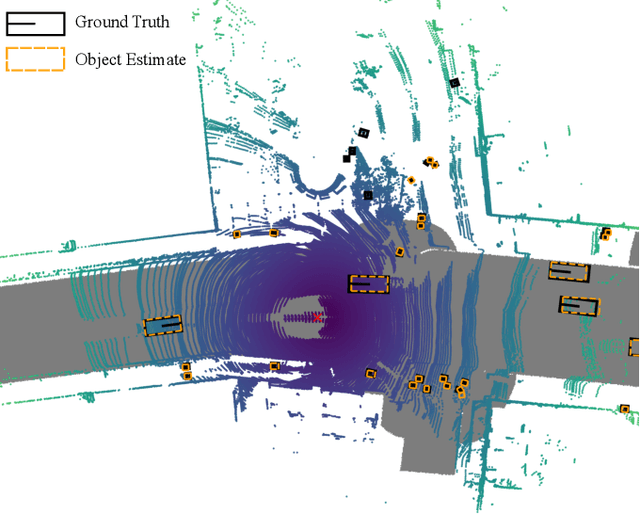
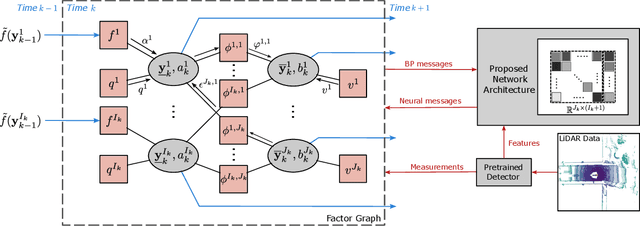
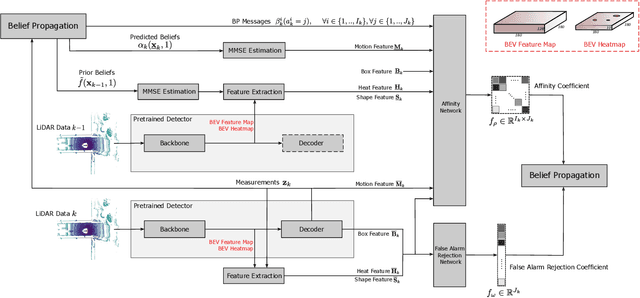
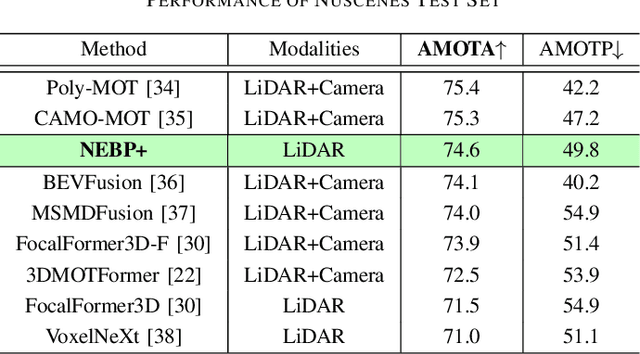
Multiobject tracking (MOT) is an important task in robotics, autonomous driving, and maritime surveillance. Traditional work on MOT is model-based and aims to establish algorithms in the framework of sequential Bayesian estimation. More recent methods are fully data-driven and rely on the training of neural networks. The two approaches have demonstrated advantages in certain scenarios. In particular, in problems where plenty of labeled data for the training of neural networks is available, data-driven MOT tends to have advantages compared to traditional methods. A natural thought is whether a general and efficient framework can integrate the two approaches. This paper advances a recently introduced hybrid model-based and data-driven method called neural-enhanced belief propagation (NEBP). Compared to existing work on NEBP for MOT, it introduces a novel neural architecture that can improve data association and new object initialization, two critical aspects of MOT. The proposed tracking method is leading the nuScenes LiDAR-only tracking challenge at the time of submission of this paper.
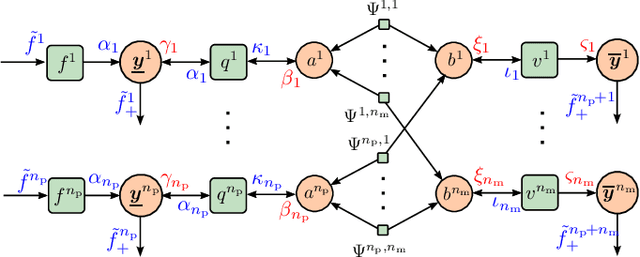
Direct Multipath-Based SLAM
Sep 30, 2024In future wireless networks, the availability of information on the position of mobile agents and the propagation environment can enable new services and increase the throughput and robustness of communications. Multipath-based simultaneous localization and mapping (SLAM) aims at estimating the position of agents and reflecting features in the environment by exploiting the relationship between the local geometry and multipath components (MPCs) in received radio signals. Existing multipath-based SLAM methods preprocess received radio signals using a channel estimator. The channel estimator lowers the data rate by extracting a set of dispersion parameters for each MPC. These parameters are then used as measurements for SLAM. Bayesian estimation for multipath-based SLAM is facilitated by the lower data rate. However, due to finite resolution capabilities limited by signal bandwidth, channel estimation is prone to errors and MPC parameters may be extracted incorrectly and lead to a reduced SLAM performance. We propose a multipath-based SLAM approach that directly uses received radio signals as inputs. A new statistical model that can effectively be represented by a factor graph is introduced. The factor graph is the starting point for the development of an efficient belief propagation (BP) method for multipath-based SLAM that avoids data preprocessing by a channel estimator. Numerical results based on synthetic and real data in challenging single-input, single-output (SISO) scenarios demonstrate that the proposed method outperforms conventional methods in terms of localization and mapping accuracy.
Particle Flows for Source Localization in 3-D Using TDOA Measurements
Aug 30, 2024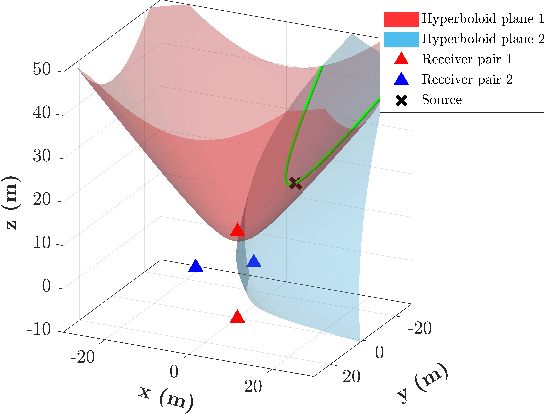
Localization using time-difference of arrival (TDOA) has myriad applications, e.g., in passive surveillance systems and marine mammal research. In this paper, we present a Bayesian estimation method that can localize an unknown number of static sources in 3-D based on TDOA measurements. The proposed localization algorithm based on particle flow (PFL) can overcome the challenges related to the highly nonlinear TDOA measurement model, the data association (DA) uncertainty, and the uncertainty in the number of sources to be localized. Different PFL strategies are compared within a unified belief propagation (BP) framework in a challenging multisensor source localization problem. In particular, we consider PFL-based approximation of beliefs based on one or multiple Gaussian kernels with parameters computed using deterministic and stochastic flow processes. Our numerical results demonstrate that the proposed method can correctly determine the number of sources and provide accurate location estimates. The stochastic flow demonstrates greater accuracy compared to the deterministic flow when using the same number of particles.
ISR: Invertible Symbolic Regression
May 10, 2024
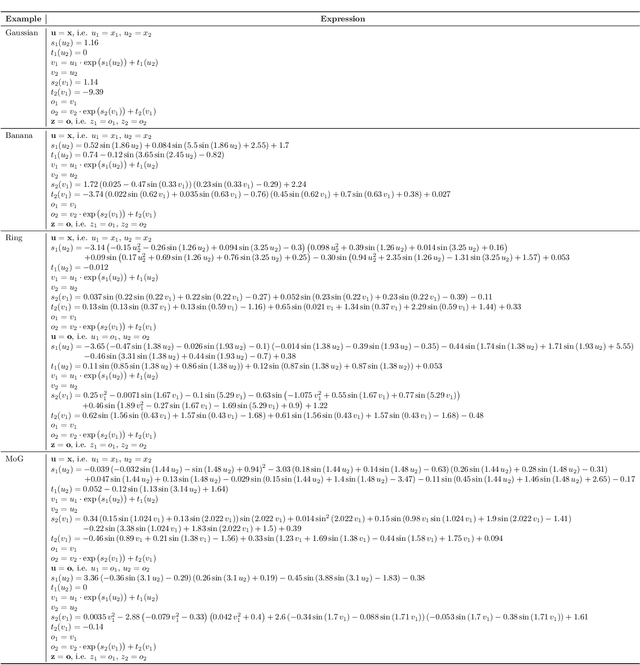

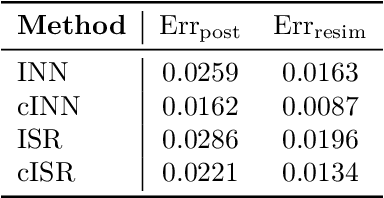
We introduce an Invertible Symbolic Regression (ISR) method. It is a machine learning technique that generates analytical relationships between inputs and outputs of a given dataset via invertible maps (or architectures). The proposed ISR method naturally combines the principles of Invertible Neural Networks (INNs) and Equation Learner (EQL), a neural network-based symbolic architecture for function learning. In particular, we transform the affine coupling blocks of INNs into a symbolic framework, resulting in an end-to-end differentiable symbolic invertible architecture that allows for efficient gradient-based learning. The proposed ISR framework also relies on sparsity promoting regularization, allowing the discovery of concise and interpretable invertible expressions. We show that ISR can serve as a (symbolic) normalizing flow for density estimation tasks. Furthermore, we highlight its practical applicability in solving inverse problems, including a benchmark inverse kinematics problem, and notably, a geoacoustic inversion problem in oceanography aimed at inferring posterior distributions of underlying seabed parameters from acoustic signals.