 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRanging of a Moving Ship Using a Single Acoustic Receiver in Shallow Water
May 02, 2025Passive acoustics is a versatile tool for maritime situational awareness, enabling applications such as source detection and localization, marine mammal tracking, and geoacoustic inversion. This study focuses on estimating the range between an acoustic receiver and a transiting ship in an acoustically range-independent shallow water environment. Here, acoustic propagation can be modeled by a set of normal modes that are determined by the shallow water waveguide and seabed characteristics. These modes are dispersive, with phase and group velocities varying with frequency, and their interference produces striation patterns that depend on range and frequency in single-hydrophone spectrograms. These patterns can often be characterized by the waveguide invariant, a single parameter describing the waveguide's properties. This paper presents a statistical waveguide invariant-based range estimation approach using a single hydrophone, leveraging broadband and tonal sounds from a transiting ship. Using data from the Seabed Characterization Experiment 2017 (SBCEX17), a large commercial ship's radiated acoustic signature within a 7 Hz bandwidth was processed to estimate its range up to 45 km with errors below three percent.
A Landmark-Aided Navigation Approach Using Side-Scan Sonar
Mar 10, 2025Cost-effective localization methods for Autonomous Underwater Vehicle (AUV) navigation are key for ocean monitoring and data collection at high resolution in time and space. Algorithmic solutions suitable for real-time processing that handle nonlinear measurement models and different forms of measurement uncertainty will accelerate the development of field-ready technology. This paper details a Bayesian estimation method for landmark-aided navigation using a Side-scan Sonar (SSS) sensor. The method bounds navigation filter error in the GPS-denied undersea environment and captures the highly nonlinear nature of slant range measurements while remaining computationally tractable. Combining a novel measurement model with the chosen statistical framework facilitates the efficient use of SSS data and, in the future, could be used in real time. The proposed filter has two primary steps: a prediction step using an unscented transform and an update step utilizing particles. The update step performs probabilistic association of sonar detections with known landmarks. We evaluate algorithm performance and tractability using synthetic data and real data collected field experiments. Field experiments were performed using two different marine robotic platforms with two different SSS and at two different sites. Finally, we discuss the computational requirements of the proposed method and how it extends to real-time applications.
A New Statistical Model for Waveguide Invariant-Based Range Estimation in Shallow Water
Dec 03, 2024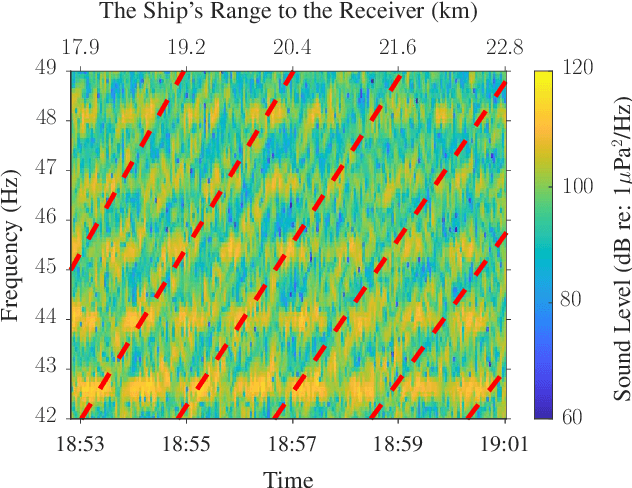
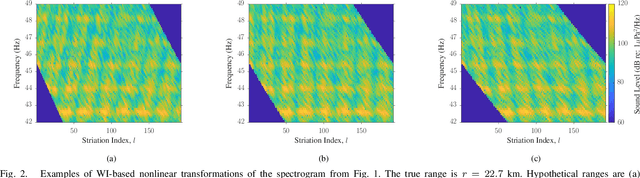
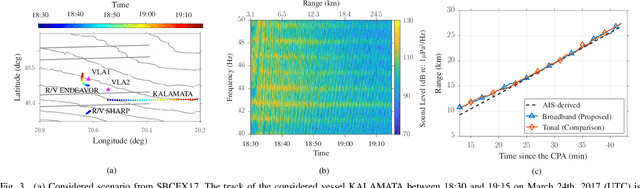
In the undersea environment, positioning is often challenging, and thus, ranging based on passive acoustic data can provide valuable information for subsurface navigation and source localization. We present a range estimation method based on the waveguide invariant (WI) theory that uses ship noise recorded underwater as an acoustic source. The WI is a scalar parameter that describes the interference patterns in spectrograms caused by pairs of modes of acoustic waves propagating in a waveguide, e.g., in shallow water. The WI theory enables ranging using a single receiver without a detailed knowledge of the environment. The machinery of a large ship induces broadband background noise characterized by sets of prominent narrowband tonal signals. We develop a likelihood function for a WI-based range estimation by introducing a statistical model for the broadband component when it dominates over the background noise. The capability of the resulting range estimation method is demonstrated on real acoustic measurements of a moving container ship recorded during the Seabed Characterization Experiment 2017 (SBCEX17).
Toward Terrain-based Navigation Using Side-scan Sonar
Jun 12, 2023This paper introduces a statistical model and corresponding sequential Bayesian estimation method for terrain-based navigation using side-scan sonar (SSS) data. The presented approach relies on slant range measurements extracted from the received ping of a SSS. In particular, incorporating slant range measurements to landmarks for navigation constrains the location and altitude error of an autonomous platform in GPS-denied environments. The proposed navigation filter consists of a prediction step based on the unscented transform and an update step that relies on particle filtering. The SSS measurement model aims to capture the highly nonlinear nature of SSS data while maintaining reasonable computational requirements in the particle-based update step. For our numerical results, we assume a scenario with a surface vehicle that performs SSS and compass measurements. The simulated scenario is consistent with our current hardware platform. We also discuss how the proposed method can be extended to autonomous underwater vehicles (AUVs) in a straightforward way and why the combination of SSS sensor and compass is particularly suitable for small autonomous platforms.
Navigation in shallow water using passive acoustic ranging
Jun 10, 2023Passive acoustics can provide a variety of capabilities with applications in oceanographic research and maritime situational awareness. In this paper, we develop a method for the navigation of autonomous underwater vehicles (AUVs) in shallow water. Our approach relies on passively recorded signals from acoustic sources of opportunities (SOOs). By making use of the waveguide invariant, a measurement of the range to the SOO is extracted from the spectrogram of a single hydrophone. Range extraction requires knowledge of the range rate, i.e., the radial velocity between the SOO and AUV, computed from the pressure fields at different time intervals. A particle-based navigation filter fuses the range measurements with the AUV's internal velocity and heading measurements. As a result, the position error, which would otherwise increase over time, can be bounded. The ability to compute the range rate and range measurements from the pressure field measured using a single hydrophone is demonstrated on real data from the SWellEx-96 experiment. The capability of the developed navigation filter is shown based on synthetic data generated by the normal mode program KRAKEN.