 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePerspective-aware fusion of incomplete depth maps and surface normals for accurate 3D reconstruction
Feb 07, 2026We address the problem of reconstructing 3D surfaces from depth and surface normal maps acquired by a sensor system based on a single perspective camera. Depth and normal maps can be obtained through techniques such as structured-light scanning and photometric stereo, respectively. We propose a perspective-aware log-depth fusion approach that extends existing orthographic gradient-based depth-normals fusion methods by explicitly accounting for perspective projection, leading to metrically accurate 3D reconstructions. Additionally, the method handles missing depth measurements by leveraging available surface normal information to inpaint gaps. Experiments on the DiLiGenT-MV data set demonstrate the effectiveness of our approach and highlight the importance of perspective-aware depth-normals fusion.
SSG2: A new modelling paradigm for semantic segmentation
Oct 12, 2023State-of-the-art models in semantic segmentation primarily operate on single, static images, generating corresponding segmentation masks. This one-shot approach leaves little room for error correction, as the models lack the capability to integrate multiple observations for enhanced accuracy. Inspired by work on semantic change detection, we address this limitation by introducing a methodology that leverages a sequence of observables generated for each static input image. By adding this "temporal" dimension, we exploit strong signal correlations between successive observations in the sequence to reduce error rates. Our framework, dubbed SSG2 (Semantic Segmentation Generation 2), employs a dual-encoder, single-decoder base network augmented with a sequence model. The base model learns to predict the set intersection, union, and difference of labels from dual-input images. Given a fixed target input image and a set of support images, the sequence model builds the predicted mask of the target by synthesizing the partial views from each sequence step and filtering out noise. We evaluate SSG2 across three diverse datasets: UrbanMonitor, featuring orthoimage tiles from Darwin, Australia with five spectral bands and 0.2m spatial resolution; ISPRS Potsdam, which includes true orthophoto images with multiple spectral bands and a 5cm ground sampling distance; and ISIC2018, a medical dataset focused on skin lesion segmentation, particularly melanoma. The SSG2 model demonstrates rapid convergence within the first few tens of epochs and significantly outperforms UNet-like baseline models with the same number of gradient updates. However, the addition of the temporal dimension results in an increased memory footprint. While this could be a limitation, it is offset by the advent of higher-memory GPUs and coding optimizations.
Sigma Point Belief Propagation
Nov 17, 2013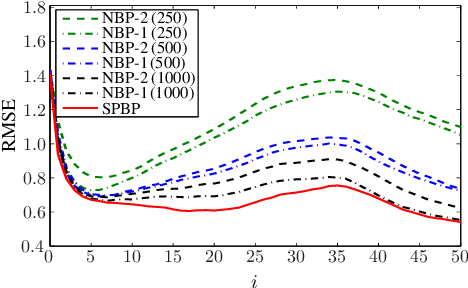
The sigma point (SP) filter, also known as unscented Kalman filter, is an attractive alternative to the extended Kalman filter and the particle filter. Here, we extend the SP filter to nonsequential Bayesian inference corresponding to loopy factor graphs. We propose sigma point belief propagation (SPBP) as a low-complexity approximation of the belief propagation (BP) message passing scheme. SPBP achieves approximate marginalizations of posterior distributions corresponding to (generally) loopy factor graphs. It is well suited for decentralized inference because of its low communication requirements. For a decentralized, dynamic sensor localization problem, we demonstrate that SPBP can outperform nonparametric (particle-based) BP while requiring significantly less computations and communications.