 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCramér-Rao Bound Analysis of Radars for Extended Vehicular Targets with Known and Unknown Shape
Jul 11, 2022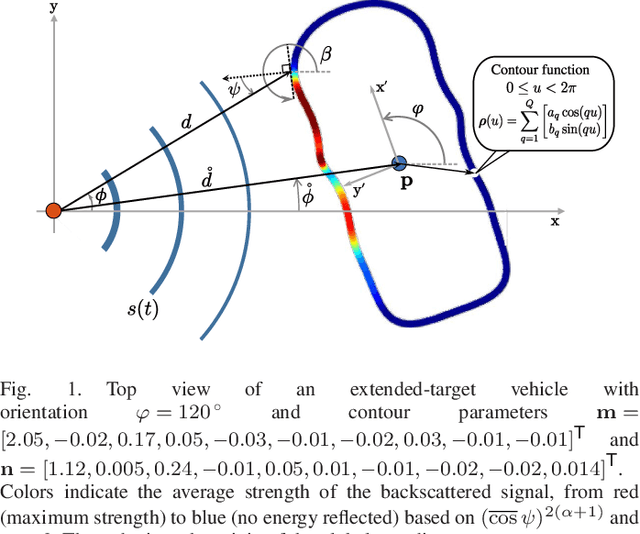
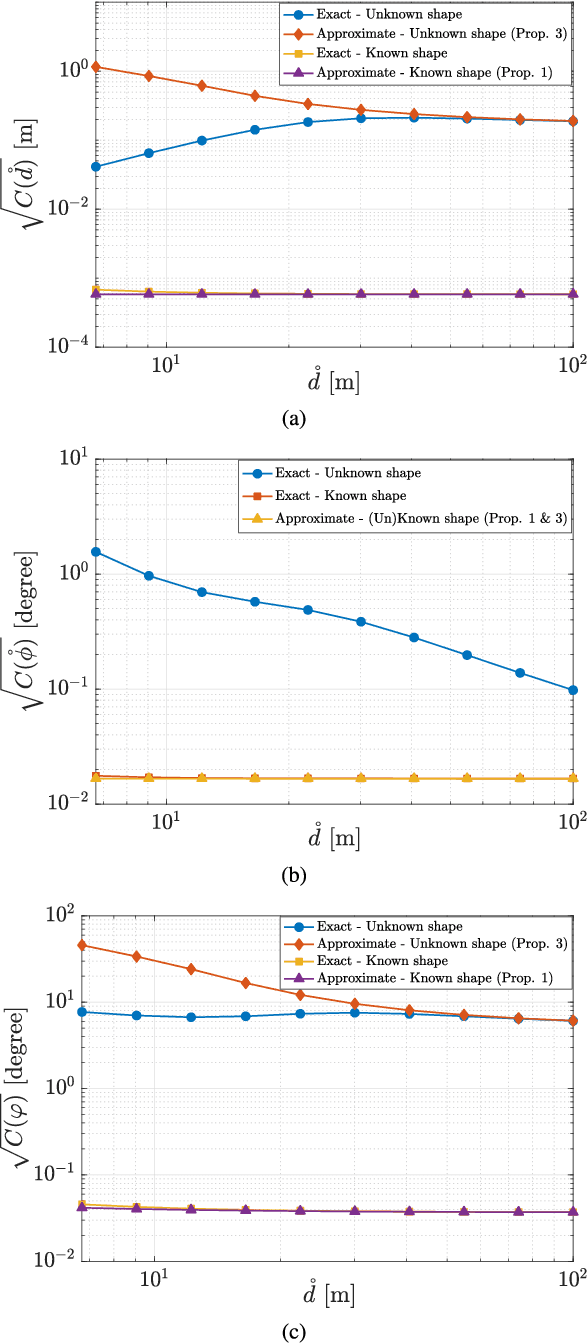
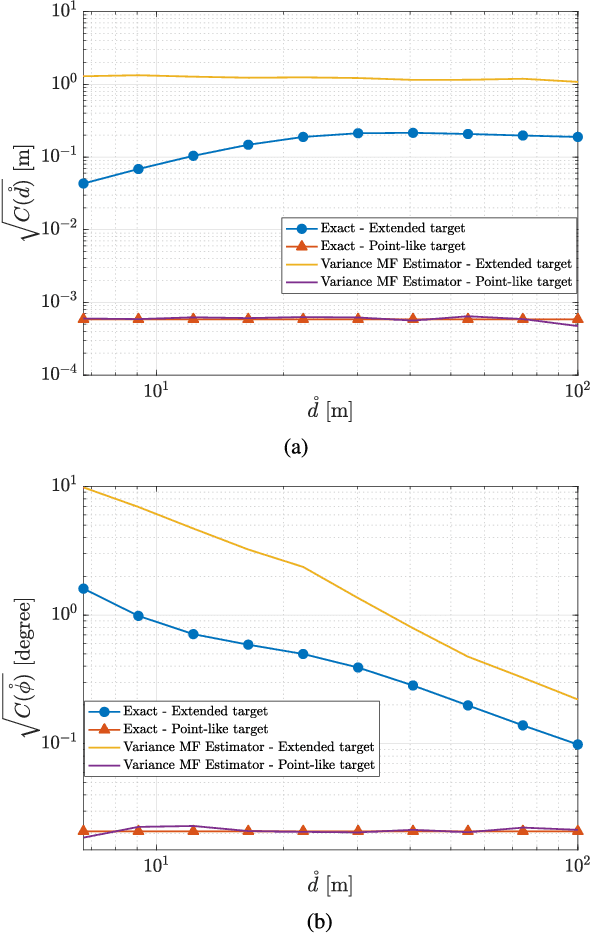
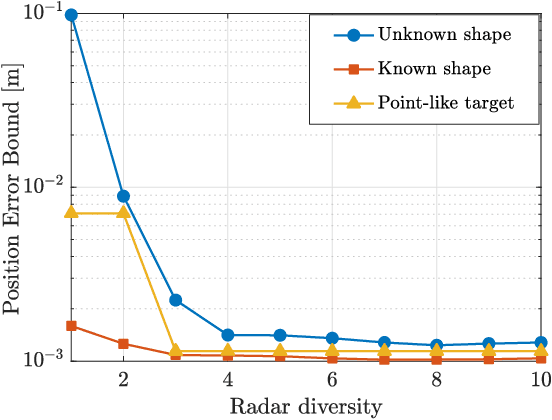
Due to their shorter operating range and large bandwidth, automotive radars can resolve many reflections from their targets of interest, mainly vehicles. This calls for the use of extended-target models in place of simpler and more widely-adopted point-like target models. However, despite some preliminary work, the fundamental connection between the radar's accuracy as a function of the target vehicle state (range, orientation, shape) and radar properties remains largely unknown for extended targets. In this work, we first devise a mathematically tractable analytical model for a vehicle with arbitrary shape, modeled as an extended target parameterized by the center position, the orientation (heading) and the perimeter contour. We show that the derived expressions of the backscatter signal are tractable and correctly capture the effects of the extended-vehicle shape. Analytical derivations of the exact and approximate hybrid Cram\'er-Rao bounds for the position, orientation and contour are provided, which reveal connections with the case of point-like target and uncover the main dependencies with the received energy, bandwidth, and array size. The theoretical investigation is performed on the two different cases of known and unknown vehicle shape. Insightful simulation results are finally presented to validate the theoretical findings, including an analysis of the diversity effect of multiple radars sensing the extended target.
Track Coalescence and Repulsion: MHT, JPDA, and BP
Sep 03, 2021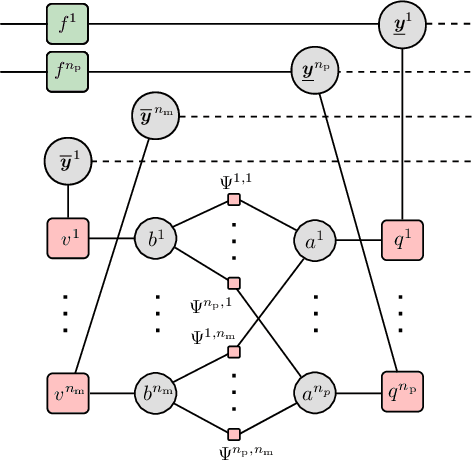

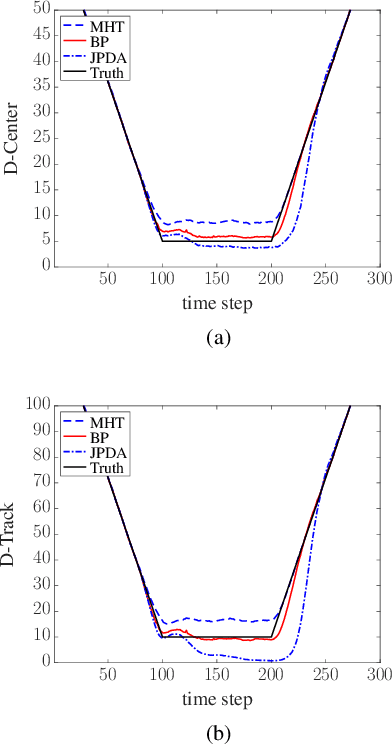
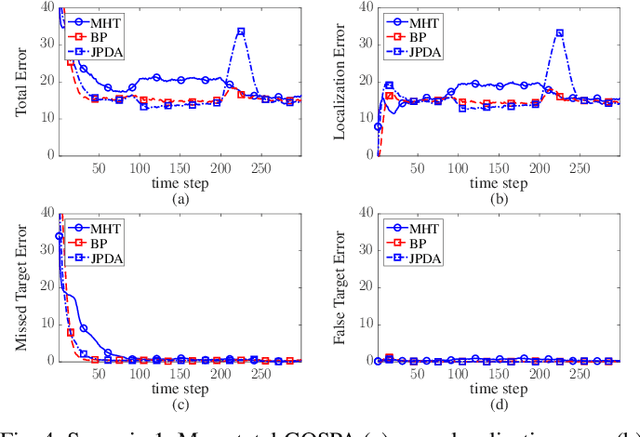
Joint probabilistic data association (JPDA) and multiple hypothesis tracking (MHT) introduced in the 70s, are still widely used methods for multitarget tracking (MTT). Extensive studies over the last few decades have revealed undesirable behavior of JPDA and MHT type methods in tracking scenarios with targets in close proximity. In particular, JPDA suffers from the track coalescence effect, i.e., estimated tracks of targets in close proximity tend to merge and can become indistinguishable. Interestingly, in MHT, an opposite effect to track coalescence called track repulsion can be observed. In this paper, we review the estimation strategies of the MHT, JPDA, and the recently introduced belief propagation (BP) framework for MTT and we investigate if BP also suffers from these two detrimental effects. Our numerical results indicate that BP-based MTT can mostly avoid both track repulsion and coalescence.
Cooperative Localization and Multitarget Tracking in Agent Networks with the Sum-Product Algorithm
Aug 05, 2021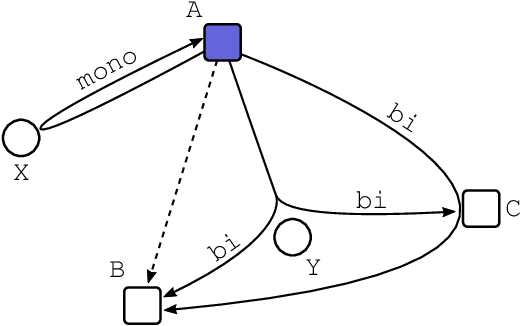
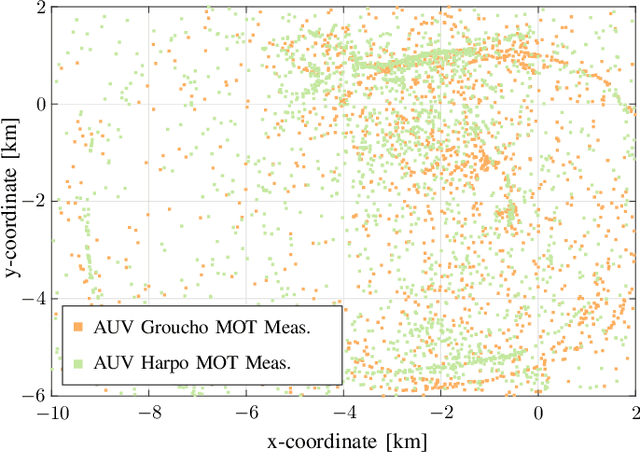
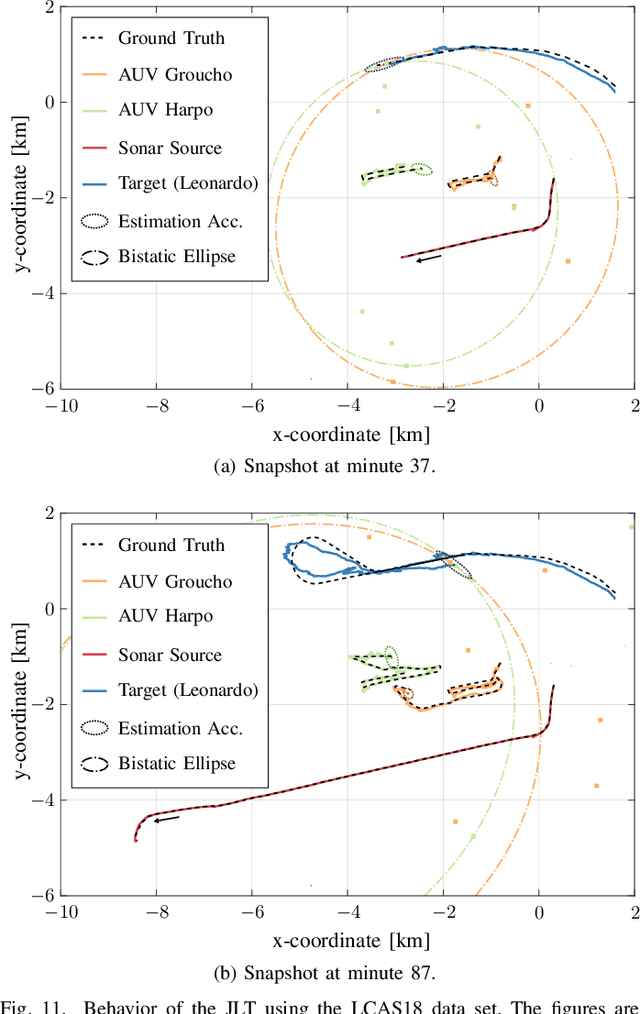
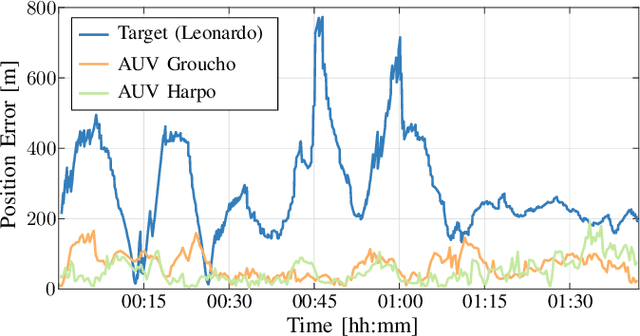
This paper addresses the problem of multitarget tracking using a network of sensing agents with unknown positions. Agents have to both localize themselves in the sensor network and, at the same time, perform multitarget tracking in the presence of clutter and target miss detection. These two problems are jointly resolved in a holistic approach where graph theory is used to describe the statistical relationships among agent states, target states, and observations. A scalable message passing scheme, based on the sum-product algorithm, enables to efficiently approximate the marginal posterior distributions of both agent and target states. The proposed solution is general enough to accommodate a full multistatic network configuration, with multiple transmitters and receivers. Numerical simulations show superior performance of the proposed joint approach with respect to the case in which cooperative self-localization and multitarget tracking are performed separately, as the former manages to extract valuable information from targets. Lastly, data acquired in 2018 by the NATO Science and Technology (STO) Centre for Maritime Research and Experimentation (CMRE) through a network of autonomous underwater vehicles demonstrates the effectiveness of the approach in practical applications.
Probabilistic Scan Matching: Bayesian Pose Estimation from Point Clouds
Jun 08, 2021

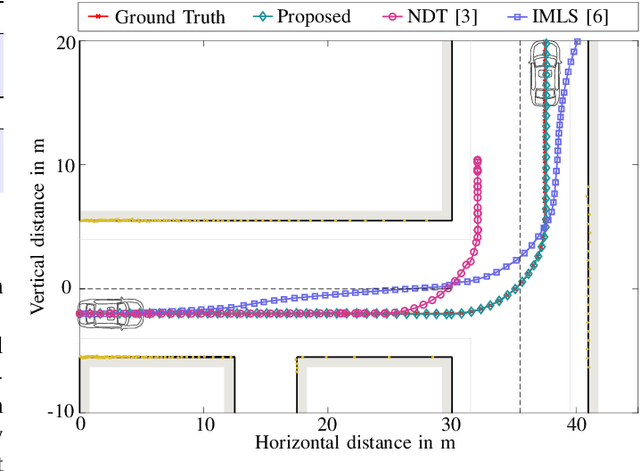

Estimating position and orientation change of a mobile platform from two consecutive point clouds provided by a high-resolution sensor is a key problem in autonomous navigation. In particular, scan matching algorithms aim to find the translation and rotation of the platform such that the two point clouds coincide. The association of measurements in point cloud one with measurements in point cloud two is a problem inherent to scan matching. Existing methods perform non-probabilistic data association, i.e., they assume a single association hypothesis. This leads to overconfident pose estimates and reduced estimation accuracy in ambiguous environments. Our probabilistic scan matching approach addresses this issue by considering all association hypotheses with their respective likelihoods. We formulate a holistic Bayesian estimation problem for both data association and pose estimation and present the corresponding joint factor graph. Near-optimum maximum a posteriori (MAP) estimates of the sensor pose are computed by performing iterative message passing on the factor graph. Our numerical study shows performance improvements compared to non-probabilistic scan matching methods that are based on the normal distributions transform (NDT) and implicit moving least squares (IMLS).