 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRF sensing with dense IoT network graphs: An EM-informed analysis
Dec 09, 2025


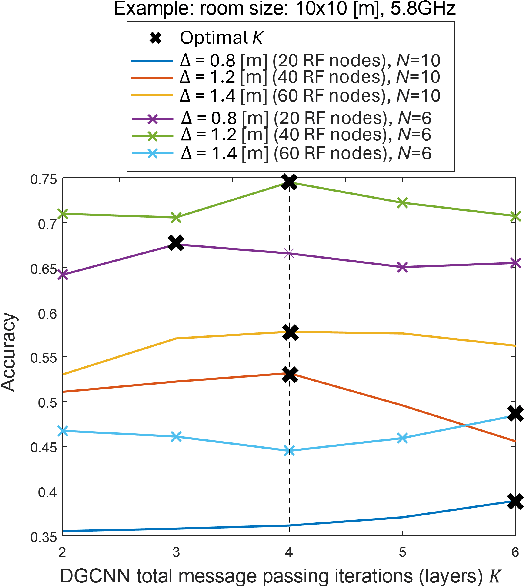
Radio Frequency (RF) sensing is attracting interest in research, standardization, and industry, especially for its potential in Internet of Things (IoT) applications. By leveraging the properties of the ElectroMagnetic (EM) waves used in wireless networks, RF sensing captures environmental information such as the presence and movement of people and objects, enabling passive localization and vision applications. This paper investigates the theoretical bounds on accuracy and resolution for RF sensing systems within dense networks. It employs an EM model to predict the effects of body blockage in various scenarios. To detect human movements, the paper proposes a deep graph neural network, trained on Received Signal Strength (RSS) samples generated from the EM model. These samples are structured as dense graphs, with nodes representing antennas and edges as radio links. Focusing on the problem of identifying the number of human subjects co-present in a monitored area over time, the paper analyzes the theoretical limits on the number of distinguishable subjects, exploring how these limits depend on factors such as the number of radio links, the size of the monitored area and the subjects physical dimensions. These bounds enable the prediction of the system performance during network pre-deployment stages. The paper also presents the results of an indoor case study, which demonstrate the effectiveness of the approach and confirm the model's predictive potential in the network design stages.
Device-Free Localization with Multiple Antenna Receivers: Simulations and Results
Jun 09, 2025Device-Free Localization (DFL) is a passive radio method able to detect, estimate, and localize targets (e.g., human or other obstacles) that do not need to carry any electronic device. According to the Integrated Sensing And Communication (ISAC) paradigm, DFL networks exploit Radio Frequency (RF) devices, used for communication purposes, to evaluate also the excess attenuation due to targets moving in the monitored area, to estimate the target positions and movements. Several target models have been discussed in the literature to evaluate the target positions by exploiting the RF signals received by networked devices. Among these models, Electromagnetic (EM) body models emerged as an interesting research field for excess attenuation prediction using commercial RF devices. While these RF devices are usually single-antenna boards, the availability of low-cost multi-antenna devices e.g. those used in WLAN (Wireless Local Area Network) scenarios, allow us to exploit array-based signal processing techniques for DFL applications as well. Using an array-capable EM body model, this paper shows how to employ array-based processing to improve angular detection of targets. Unlike single-antenna devices that can provide only attenuation information, multi-antenna devices can provide both angular and attenuation estimates about the target location. To this end, simulations are presented and preliminary results are discussed. The proposed framework paves the way for a wider use of multi-antenna devices based, for instance, on WiFi6 and WiFi7 standards.
On the impact of the antenna radiation patterns in passive radio sensing
May 15, 2024Electromagnetic (EM) body models based on the scalar diffraction theory allow to predict the impact of subject motions on the radio propagation channel without requiring a time-consuming full-wave approach. On the other hand, they are less effective in complex environments characterized by significant multipath effects. Recently, emerging radio sensing applications have proposed the adoption of smart antennas with non-isotropic radiation characteristics to improve coverage.This letter investigates the impact of antenna radiation patterns in passive radio sensing applications. Adaptations of diffraction-based EM models are proposed to account for antenna non-uniform angular filtering. Next, we quantify experimentally the impact of diffraction and multipath disturbance components on radio sensing accuracy in environments with smart antennas.
Full-wave EM simulation analysis of human body blockage by dense 2D antenna arrays
May 15, 2024Recently, proposals of human-sensing-based services for cellular and local area networks have brought indoor localization to the attention of several research groups. In response to these stimuli, various Device-Free Localization (DFL) techniques, also known as Passive Localization methods, have emerged by exploiting ambient signals to locate and track individuals that do not carry any electronic device. This study delves into human passive indoor localization through full-wave electromagnetic simulations. For the scope, we exploit simulations from the commercial tool FEKO software that employs the Method of Moments (MoM). In particular, we collect and analyze the electric field values in a scenario constituted by a dense 2D/3D deployment of receivers in the presence of an anthropomorphic mobile target. The paper describes in detail the collected dataset and provides a first analysis based on a statistical approach. Possible use cases are also investigated through examples in the context of passive localization, sensing, and imaging.
Physics-informed generative neural networks for RF propagation prediction with application to indoor body perception
May 03, 2024Electromagnetic (EM) body models designed to predict Radio-Frequency (RF) propagation are time-consuming methods which prevent their adoption in strict real-time computational imaging problems, such as human body localization and sensing. Physics-informed Generative Neural Network (GNN) models have been recently proposed to reproduce EM effects, namely to simulate or reconstruct missing data or samples by incorporating relevant EM principles and constraints. The paper discusses a Variational Auto-Encoder (VAE) model which is trained to reproduce the effects of human motions on the EM field and incorporate EM body diffraction principles. Proposed physics-informed generative neural network models are verified against both classical diffraction-based EM tools and full-wave EM body simulations.
An EM Body Model for Device-Free Localization with Multiple Antenna Receivers: A First Study
May 02, 2024Device-Free Localization (DFL) employs passive radio techniques capable to detect and locate people without imposing them to wear any electronic device. By exploiting the Integrated Sensing and Communication paradigm, DFL networks employ Radio Frequency (RF) nodes to measure the excess attenuation introduced by the subjects (i.e., human bodies) moving inside the monitored area, and to estimate their positions and movements. Physical, statistical, and ElectroMagnetic (EM) models have been proposed in the literature to estimate the body positions according to the RF signals collected by the nodes. These body models usually employ a single-antenna processing for localization purposes. However, the availability of low-cost multi-antenna devices such as those used for WLAN (Wireless Local Area Network) applications and the timely development of array-based body models, allow us to employ array-based processing techniques in DFL networks. By exploiting a suitable array-capable EM body model, this paper proposes an array-based framework to improve people sensing and localization. In particular, some simulations are proposed and discussed to compare the model results in both single- and multi-antenna scenarios. The proposed framework paves the way for a wider use of multi-antenna devices (e.g., those employed in current IEEE 802.11ac/ax/be and forthcoming IEEE 802.11be networks) and novel beamforming algorithms for DFL scenarios.
A physics-informed generative model for passive radio-frequency sensing
Oct 06, 2023



Electromagnetic (EM) body models predict the impact of human presence and motions on the Radio-Frequency (RF) stray radiation received by wireless devices nearby. These wireless devices may be co-located members of a Wireless Local Area Network (WLAN) or even cellular devices connected with a Wide Area Network (WAN). Despite their accuracy, EM models are time-consuming methods which prevent their adoption in strict real-time computational imaging problems and Bayesian estimation, such as passive localization, RF tomography, and holography. Physics-informed Generative Neural Network (GNN) models have recently attracted a lot of attention thanks to their potential to reproduce a process by incorporating relevant physical laws and constraints. Thus, GNNs can be used to simulate/reconstruct missing samples, or learn physics-informed data distributions. The paper discusses a Variational Auto-Encoder (VAE) technique and its adaptations to incorporate a relevant EM body diffraction method with applications to passive RF sensing and localization/tracking. The proposed EM-informed generative model is verified against classical diffraction-based EM body tools and validated on real RF measurements. Applications are also introduced and discussed.
On the Energy and Communication Efficiency Tradeoffs in Federated and Multi-Task Learning
Dec 02, 2022



Recent advances in Federated Learning (FL) have paved the way towards the design of novel strategies for solving multiple learning tasks simultaneously, by leveraging cooperation among networked devices. Multi-Task Learning (MTL) exploits relevant commonalities across tasks to improve efficiency compared with traditional transfer learning approaches. By learning multiple tasks jointly, significant reduction in terms of energy footprints can be obtained. This article provides a first look into the energy costs of MTL processes driven by the Model-Agnostic Meta-Learning (MAML) paradigm and implemented in distributed wireless networks. The paper targets a clustered multi-task network setup where autonomous agents learn different but related tasks. The MTL process is carried out in two stages: the optimization of a meta-model that can be quickly adapted to learn new tasks, and a task-specific model adaptation stage where the learned meta-model is transferred to agents and tailored for a specific task. This work analyzes the main factors that influence the MTL energy balance by considering a multi-task Reinforcement Learning (RL) setup in a robotized environment. Results show that the MAML method can reduce the energy bill by at least 2 times compared with traditional approaches without inductive transfer. Moreover, it is shown that the optimal energy balance in wireless networks depends on uplink/downlink and sidelink communication efficiencies.
An Energy and Carbon Footprint Analysis of Distributed and Federated Learning
Jun 21, 2022
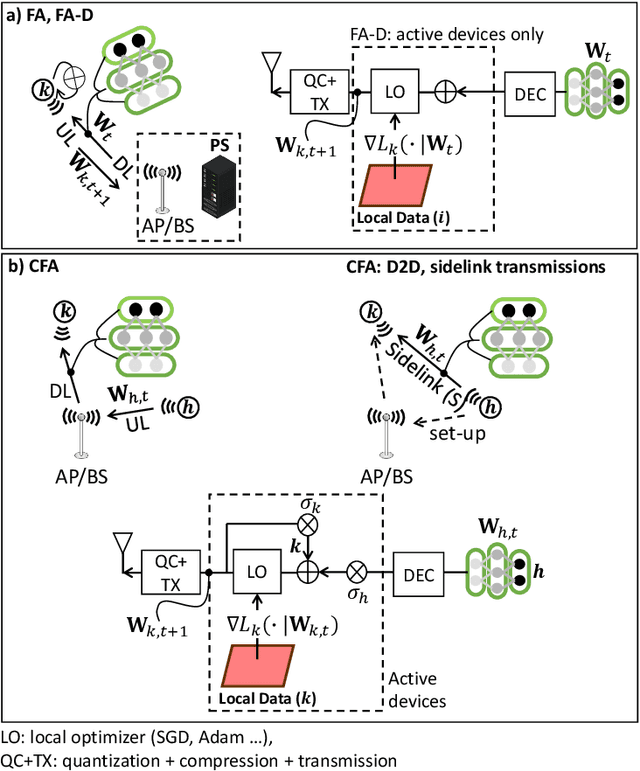
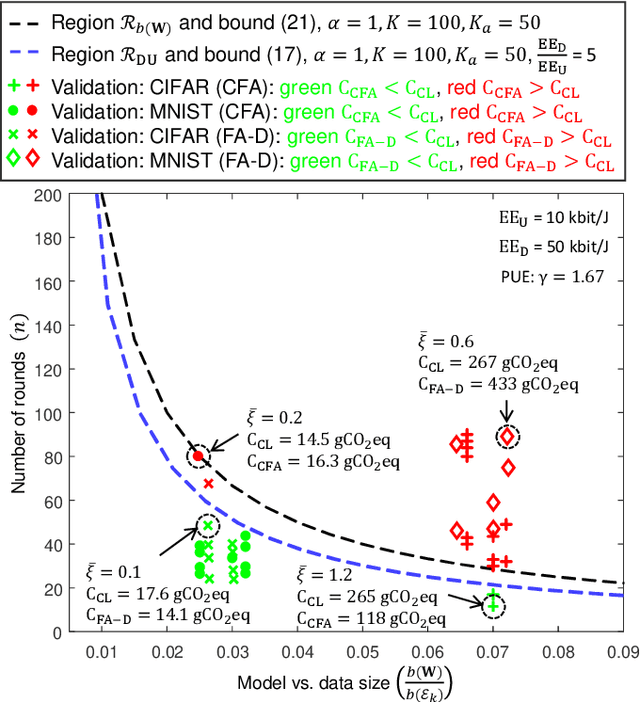
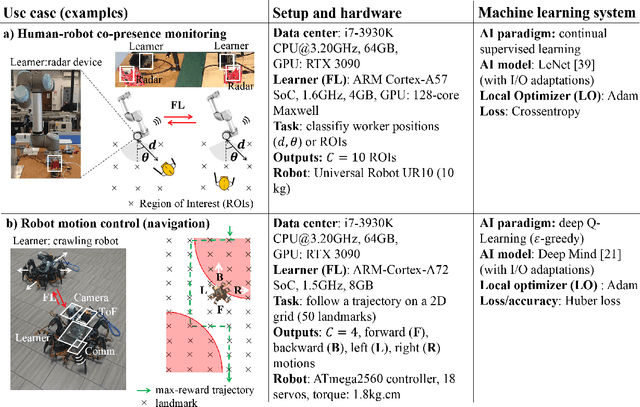
Classical and centralized Artificial Intelligence (AI) methods require moving data from producers (sensors, machines) to energy hungry data centers, raising environmental concerns due to computational and communication resource demands, while violating privacy. Emerging alternatives to mitigate such high energy costs propose to efficiently distribute, or federate, the learning tasks across devices, which are typically low-power. This paper proposes a novel framework for the analysis of energy and carbon footprints in distributed and federated learning (FL). The proposed framework quantifies both the energy footprints and the carbon equivalent emissions for vanilla FL methods and consensus-based fully decentralized approaches. We discuss optimal bounds and operational points that support green FL designs and underpin their sustainability assessment. Two case studies from emerging 5G industry verticals are analyzed: these quantify the environmental footprints of continual and reinforcement learning setups, where the training process is repeated periodically for continuous improvements. For all cases, sustainability of distributed learning relies on the fulfillment of specific requirements on communication efficiency and learner population size. Energy and test accuracy should be also traded off considering the model and the data footprints for the targeted industrial applications.
Electromagnetic Models for Passive Detection and Localization of Multiple Bodies
Apr 15, 2021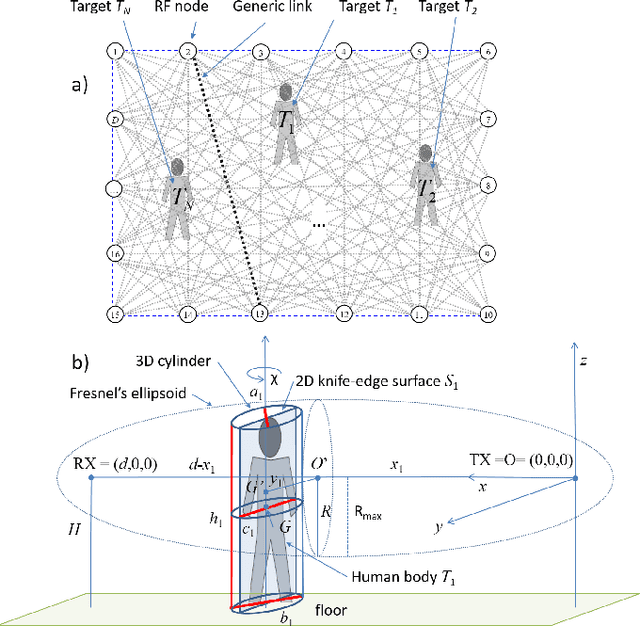
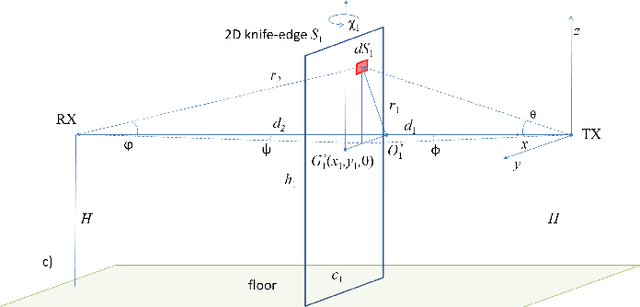


The paper proposes a multi-body electromagnetic (EM) model for the quantitative evaluation of the influence of multiple human bodies in the surroundings of a radio link. Modeling of human-induced fading is the key element for the development of real-time Device-Free (or passive) Localization (DFL) and body occupancy tracking systems based on the processing of the Received Signal Strength (RSS) data recorded by radio-frequency devices. The proposed physical-statistical model, is able to relate the RSS measurements to the position, size, orientation, and random movements of people located in the link area. This novel EM model is thus instrumental for crowd sensing, occupancy estimation and people counting applications for indoor and outdoor scenarios. The paper presents the complete framework for the generic N-body scenario where the proposed EM model is based on the knife-edge approach that is generalized here for multiple targets. The EM-equivalent size of each target is then optimized to reproduce the body-induced alterations of the free space radio propagation. The predicted results are then compared against the full EM simulations obtained with a commercially available simulator. Finally, experiments are carried out to confirm the validity the proposed model using IEEE 802.15.4-compliant industrial radio devices.