 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTactical Game-theoretic Decision-making with Homotopy Class Constraints
Jun 19, 2024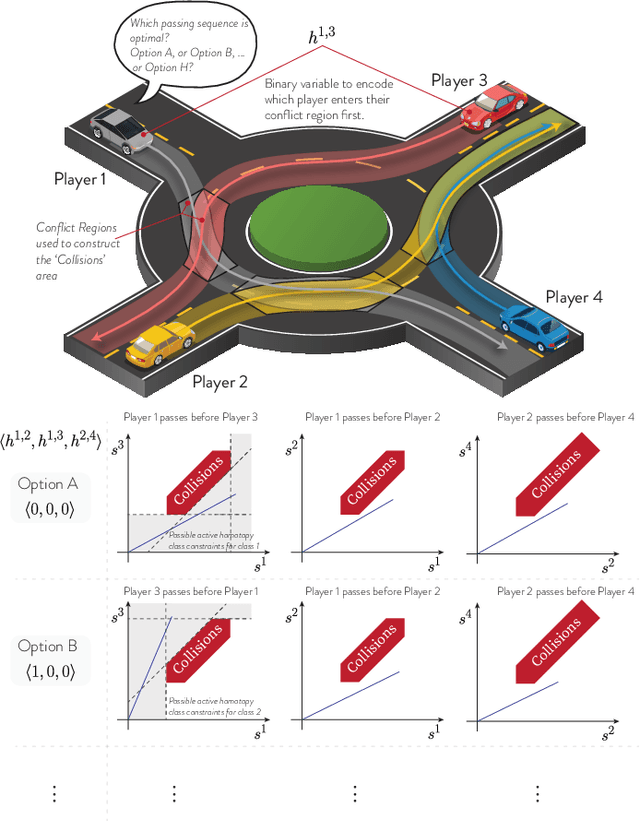
We propose a tactical homotopy-aware decision-making framework for game-theoretic motion planning in urban environments. We model urban driving as a generalized Nash equilibrium problem and employ a mixed-integer approach to tame the combinatorial aspect of motion planning. More specifically, by utilizing homotopy classes, we partition the high-dimensional solution space into finite, well-defined subregions. Each subregion (homotopy) corresponds to a high-level tactical decision, such as the passing order between pairs of players. The proposed formulation allows to find global optimal Nash equilibria in a computationally tractable manner by solving a mixed-integer quadratic program. Each homotopy decision is represented by a binary variable that activates different sets of linear collision avoidance constraints. This extra homotopic constraint allows to find solutions in a more efficient way (on a roundabout scenario on average 5-times faster). We experimentally validate the proposed approach on scenarios taken from the rounD dataset. Simulation-based testing in receding horizon fashion demonstrates the capability of the framework in achieving globally optimal solutions while yielding a 78% average decrease in the computational time with respect to an implementation without the homotopic constraints.
Development and Simulation-based Testing of a 5G-Connected Intersection AEB System
Feb 02, 2021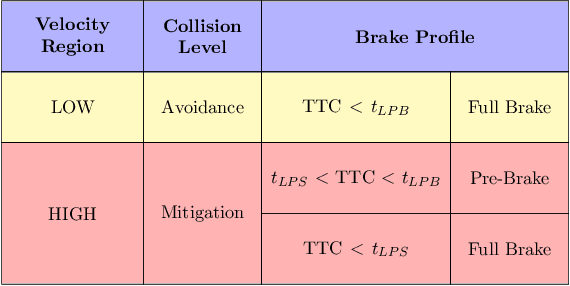
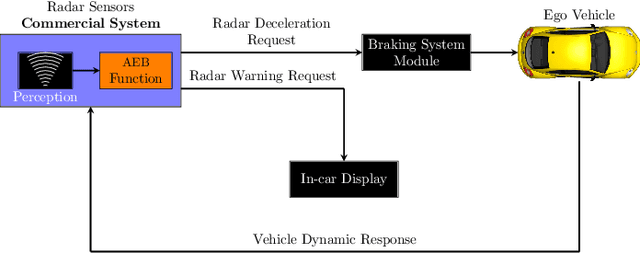
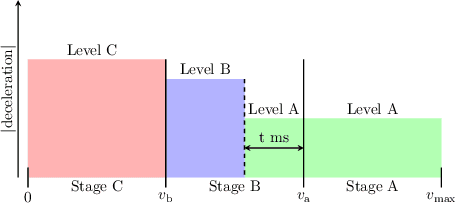
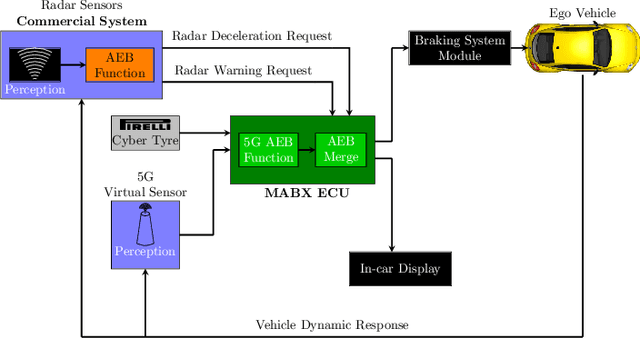
In Europe, 20% of road crashes occur at intersections. In recent years, evolving communication technologies are making V2V and V2I faster and more reliable; with such advancements, these crashes, as well as their economic cost, can be partially reduced. In this work, we concentrate on straight path intersection collisions. Connectivity-based algorithms relying on 5G technology and smart sensors are presented and compared to a commercial radar AEB logic in order to evaluate performances and effectiveness in collision avoidance or mitigation. The aforementioned novel safety systems are tested in a blind intersection and low adherence scenario. The first algorithm proposed is obtained by incorporating connectivity information to the original control scheme, while the second algorithm proposed is a novel control logic fully capable of utilizing also adherence estimation provided by smart sensors. Test results show an improvement in terms of safety for both the architecture and high prospects for future developments.