 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTrajectory Optimization for Adaptive Informative Path Planning with Multimodal Sensing
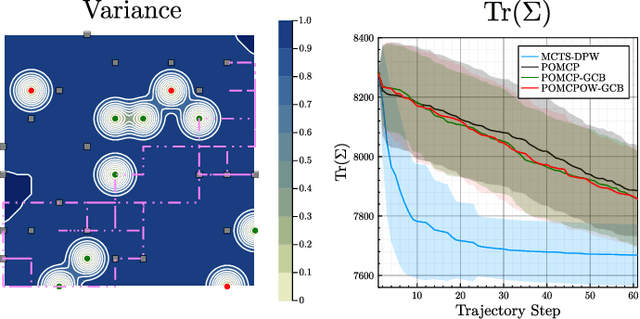
Apr 29, 2024We consider the problem of an autonomous agent equipped with multiple sensors, each with different sensing precision and energy costs. The agent's goal is to explore the environment and gather information subject to its resource constraints in unknown, partially observable environments. The challenge lies in reasoning about the effects of sensing and movement while respecting the agent's resource and dynamic constraints. We formulate the problem as a trajectory optimization problem and solve it using a projection-based trajectory optimization approach where the objective is to reduce the variance of the Gaussian process world belief. Our approach outperforms previous approaches in long horizon trajectories by achieving an overall variance reduction of up to 85% and reducing the root-mean square error in the environment belief by 50%. This approach was developed in support of rover path planning for the NASA VIPER Mission.
Contingency Planning Using Bi-level Markov Decision Processes for Space Missions
Feb 26, 2024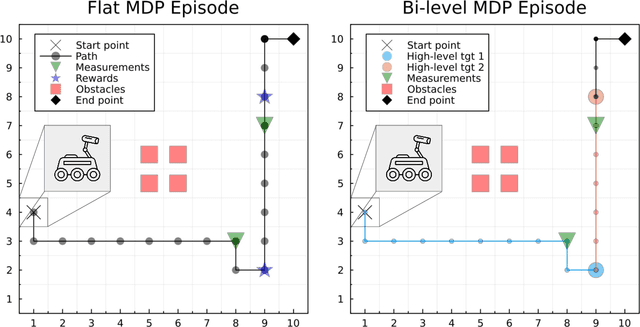
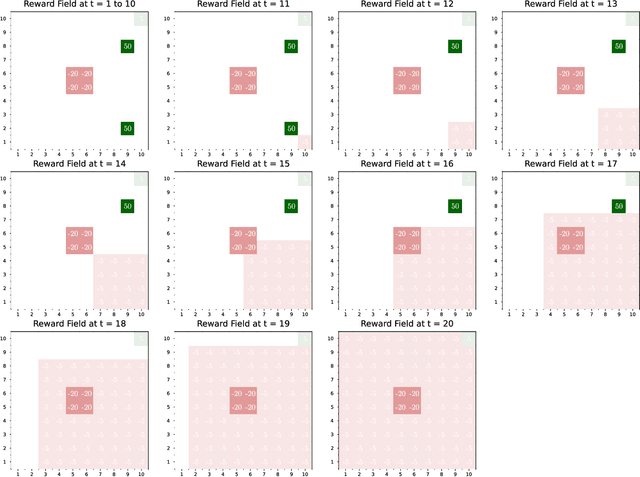
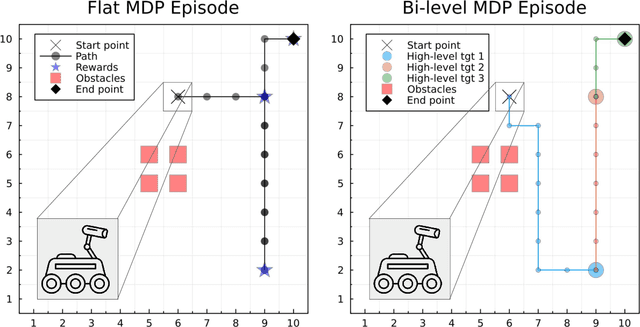
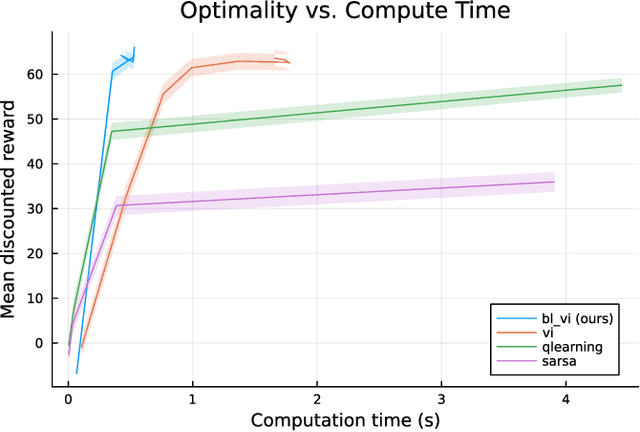
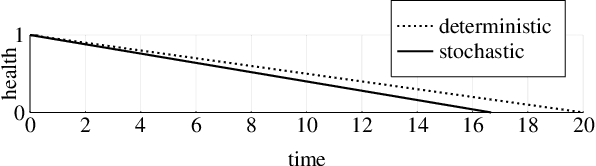
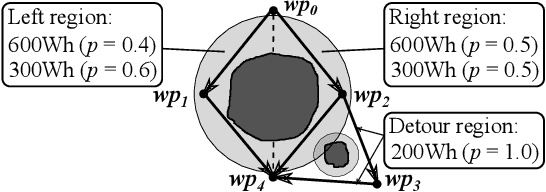
This work focuses on autonomous contingency planning for scientific missions by enabling rapid policy computation from any off-nominal point in the state space in the event of a delay or deviation from the nominal mission plan. Successful contingency planning involves managing risks and rewards, often probabilistically associated with actions, in stochastic scenarios. Markov Decision Processes (MDPs) are used to mathematically model decision-making in such scenarios. However, in the specific case of planetary rover traverse planning, the vast action space and long planning time horizon pose computational challenges. A bi-level MDP framework is proposed to improve computational tractability, while also aligning with existing mission planning practices and enhancing explainability and trustworthiness of AI-driven solutions. We discuss the conversion of a mission planning MDP into a bi-level MDP, and test the framework on RoverGridWorld, a modified GridWorld environment for rover mission planning. We demonstrate the computational tractability and near-optimal policies achievable with the bi-level MDP approach, highlighting the trade-offs between compute time and policy optimality as the problem's complexity grows. This work facilitates more efficient and flexible contingency planning in the context of scientific missions.
Sequential Bayesian Optimization for Adaptive Informative Path Planning with Multimodal Sensing
Sep 16, 2022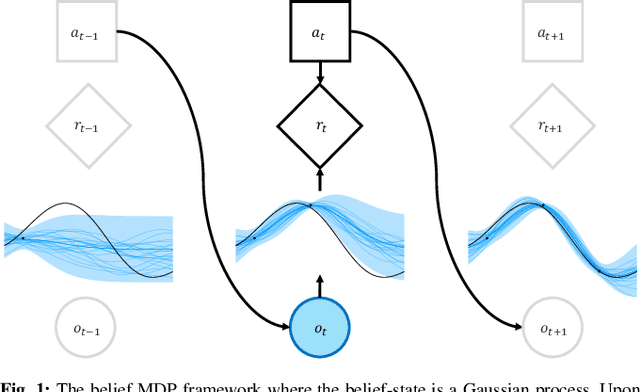


Adaptive Informative Path Planning with Multimodal Sensing (AIPPMS) considers the problem of an agent equipped with multiple sensors, each with different sensing accuracy and energy costs. The agent's goal is to explore the environment and gather information subject to its resource constraints in unknown, partially observable environments. Previous work has focused on the less general Adaptive Informative Path Planning (AIPP) problem, which considers only the effect of the agent's movement on received observations. The AIPPMS problem adds additional complexity by requiring that the agent reasons jointly about the effects of sensing and movement while balancing resource constraints with information objectives. We formulate the AIPPMS problem as a belief Markov decision process with Gaussian process beliefs and solve it using a sequential Bayesian optimization approach with online planning. Our approach consistently outperforms previous AIPPMS solutions by more than doubling the average reward received in almost every experiment while also reducing the root-mean-square error in the environment belief by 50%. We completely open-source our implementation to aid in further development and comparison.
Rethinking System Health Management
Mar 10, 2019

Health management of complex dynamic systems has traditionally evolved separately from automated control, planning, and scheduling (generally referred to in the paper as decision making). A goal of Integrated System Health Management has been to enable coordination between system health management and decision making, although successful practical implementations have remained limited. This paper proposes that, rather than being treated as connected, yet distinct entities, system health management and decision making should be unified in their formulations. Enabled by advances in modeling and computing, we argue that the unified approach will increase a system's operational effectiveness and may also lead to a lower overall system complexity. We overview the prevalent system health management methodology and illustrate its limitations through numerical examples. We then describe the proposed unification approach and show how it accommodates the typical system health management concepts.