 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUncertainty-Informed Active Perception for Open Vocabulary Object Goal Navigation
Jun 16, 2025Mobile robots exploring indoor environments increasingly rely on vision-language models to perceive high-level semantic cues in camera images, such as object categories. Such models offer the potential to substantially advance robot behaviour for tasks such as object-goal navigation (ObjectNav), where the robot must locate objects specified in natural language by exploring the environment. Current ObjectNav methods heavily depend on prompt engineering for perception and do not address the semantic uncertainty induced by variations in prompt phrasing. Ignoring semantic uncertainty can lead to suboptimal exploration, which in turn limits performance. Hence, we propose a semantic uncertainty-informed active perception pipeline for ObjectNav in indoor environments. We introduce a novel probabilistic sensor model for quantifying semantic uncertainty in vision-language models and incorporate it into a probabilistic geometric-semantic map to enhance spatial understanding. Based on this map, we develop a frontier exploration planner with an uncertainty-informed multi-armed bandit objective to guide efficient object search. Experimental results demonstrate that our method achieves ObjectNav success rates comparable to those of state-of-the-art approaches, without requiring extensive prompt engineering.
Towards Map-Agnostic Policies for Adaptive Informative Path Planning
Oct 22, 2024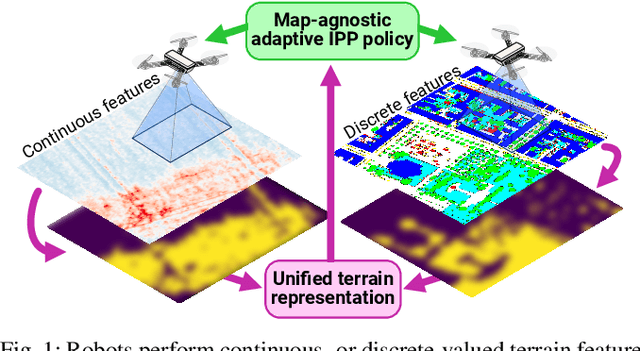

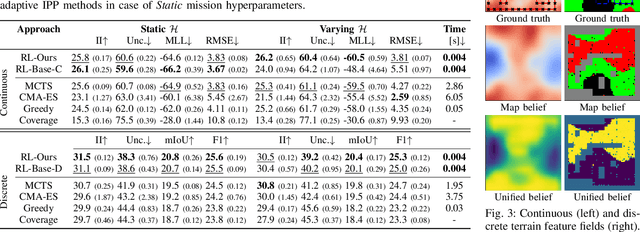

Robots are frequently tasked to gather relevant sensor data in unknown terrains. A key challenge for classical path planning algorithms used for autonomous information gathering is adaptively replanning paths online as the terrain is explored given limited onboard compute resources. Recently, learning-based approaches emerged that train planning policies offline and enable computationally efficient online replanning performing policy inference. These approaches are designed and trained for terrain monitoring missions assuming a single specific map representation, which limits their applicability to different terrains. To address these issues, we propose a novel formulation of the adaptive informative path planning problem unified across different map representations, enabling training and deploying planning policies in a larger variety of monitoring missions. Experimental results validate that our novel formulation easily integrates with classical non-learning-based planning approaches while maintaining their performance. Our trained planning policy performs similarly to state-of-the-art map-specifically trained policies. We validate our learned policy on unseen real-world terrain datasets.
Active Learning of Robot Vision Using Adaptive Path Planning
Oct 14, 2024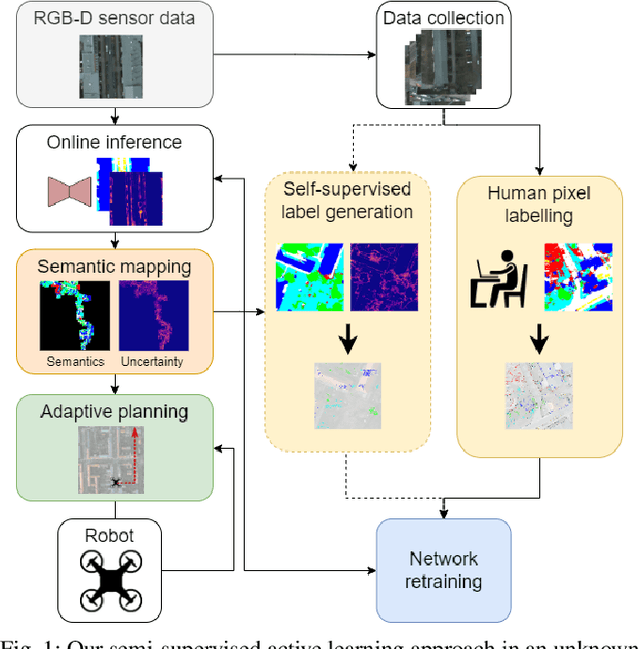
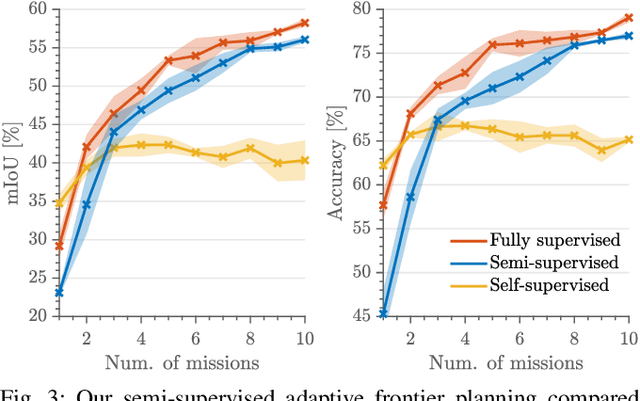
Robots need robust and flexible vision systems to perceive and reason about their environments beyond geometry. Most of such systems build upon deep learning approaches. As autonomous robots are commonly deployed in initially unknown environments, pre-training on static datasets cannot always capture the variety of domains and limits the robot's vision performance during missions. Recently, self-supervised as well as fully supervised active learning methods emerged to improve robotic vision. These approaches rely on large in-domain pre-training datasets or require substantial human labelling effort. To address these issues, we present a recent adaptive planning framework for efficient training data collection to substantially reduce human labelling requirements in semantic terrain monitoring missions. To this end, we combine high-quality human labels with automatically generated pseudo labels. Experimental results show that the framework reaches segmentation performance close to fully supervised approaches with drastically reduced human labelling effort while outperforming purely self-supervised approaches. We discuss the advantages and limitations of current methods and outline valuable future research avenues towards more robust and flexible robotic vision systems in unknown environments.
Robotic Learning for Adaptive Informative Path Planning
Apr 15, 2024Adaptive informative path planning (AIPP) is important to many robotics applications, enabling mobile robots to efficiently collect useful data about initially unknown environments. In addition, learning-based methods are increasingly used in robotics to enhance adaptability, versatility, and robustness across diverse and complex tasks. Our survey explores research on applying robotic learning to AIPP, bridging the gap between these two research fields. We begin by providing a unified mathematical framework for general AIPP problems. Next, we establish two complementary taxonomies of current work from the perspectives of (i) learning algorithms and (ii) robotic applications. We explore synergies, recent trends, and highlight the benefits of learning-based methods in AIPP frameworks. Finally, we discuss key challenges and promising future directions to enable more generally applicable and robust robotic data-gathering systems through learning. We provide a comprehensive catalogue of papers reviewed in our survey, including publicly available repositories, to facilitate future studies in the field.
Deep Reinforcement Learning with Dynamic Graphs for Adaptive Informative Path Planning
Feb 07, 2024Autonomous robots are often employed for data collection due to their efficiency and low labour costs. A key task in robotic data acquisition is planning paths through an initially unknown environment to collect observations given platform-specific resource constraints, such as limited battery life. Adaptive online path planning in 3D environments is challenging due to the large set of valid actions and the presence of unknown occlusions. To address these issues, we propose a novel deep reinforcement learning approach for adaptively replanning robot paths to map targets of interest in unknown 3D environments. A key aspect of our approach is a dynamically constructed graph that restricts planning actions local to the robot, allowing us to quickly react to newly discovered obstacles and targets of interest. For replanning, we propose a new reward function that balances between exploring the unknown environment and exploiting online-collected data about the targets of interest. Our experiments show that our method enables more efficient target detection compared to state-of-the-art learning and non-learning baselines. We also show the applicability of our approach for orchard monitoring using an unmanned aerial vehicle in a photorealistic simulator.
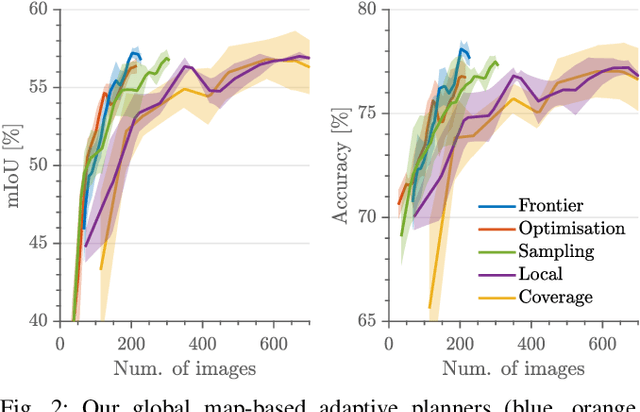
Semi-Supervised Active Learning for Semantic Segmentation in Unknown Environments Using Informative Path Planning
Dec 07, 2023Semantic segmentation enables robots to perceive and reason about their environments beyond geometry. Most of such systems build upon deep learning approaches. As autonomous robots are commonly deployed in initially unknown environments, pre-training on static datasets cannot always capture the variety of domains and limits the robot's perception performance during missions. Recently, self-supervised and fully supervised active learning methods emerged to improve a robot's vision. These approaches rely on large in-domain pre-training datasets or require substantial human labelling effort. We propose a planning method for semi-supervised active learning of semantic segmentation that substantially reduces human labelling requirements compared to fully supervised approaches. We leverage an adaptive map-based planner guided towards the frontiers of unexplored space with high model uncertainty collecting training data for human labelling. A key aspect of our approach is to combine the sparse high-quality human labels with pseudo labels automatically extracted from highly certain environment map areas. Experimental results show that our method reaches segmentation performance close to fully supervised approaches with drastically reduced human labelling effort while outperforming self-supervised approaches.
Graph-based View Motion Planning for Fruit Detection
Mar 06, 2023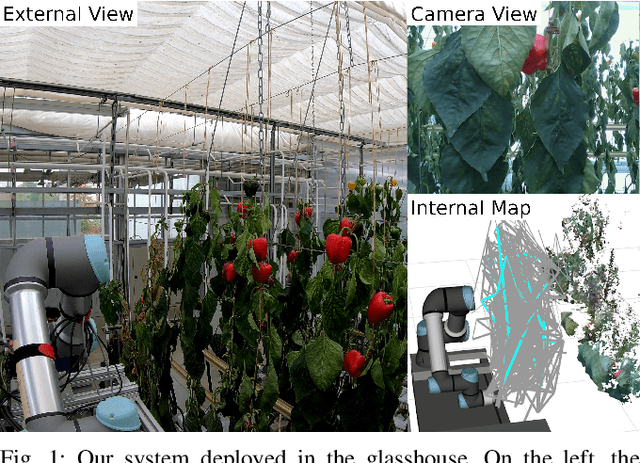
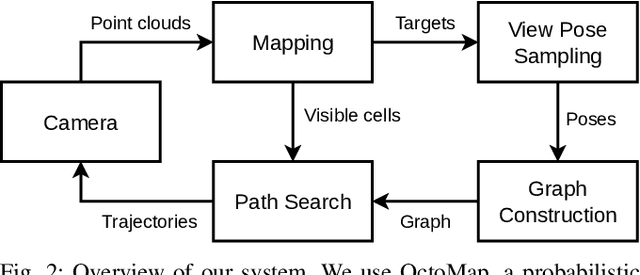
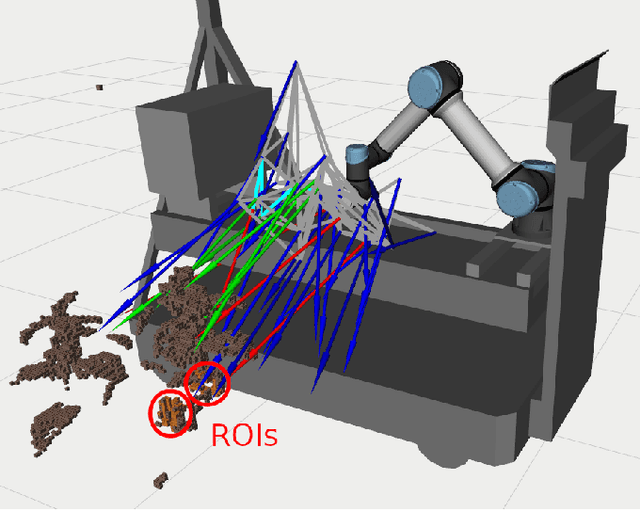
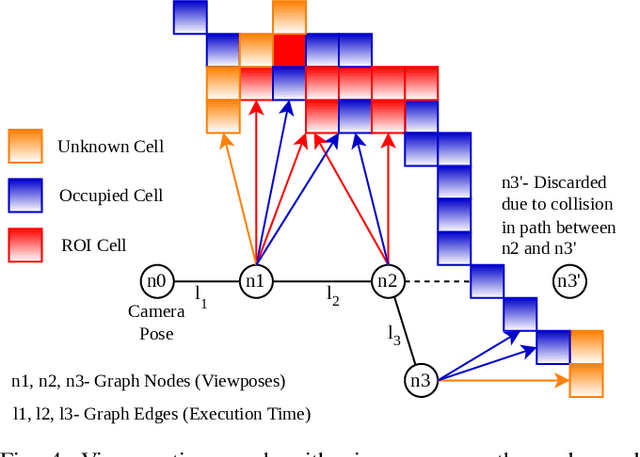
Crop monitoring is crucial for maximizing agricultural productivity and efficiency. However, monitoring large and complex structures such as sweet pepper plants presents significant challenges, especially due to frequent occlusions of the fruits. Traditional next-best view planning can lead to unstructured and inefficient coverage of the crops. To address this, we propose a novel view motion planner that builds a graph network of viable view poses and trajectories between nearby poses, thereby considering robot motion constraints. The planner searches the graphs for view sequences with the highest accumulated information gain, allowing for efficient pepper plant monitoring while minimizing occlusions. The generated view poses aim at both sufficiently covering already detected and discovering new fruits. The graph and the corresponding best view pose sequence are computed with a limited horizon and are adaptively updated in fixed time intervals as the system gathers new information. We demonstrate the effectiveness of our approach through simulated and real-world experiments using a robotic arm equipped with an RGB-D camera and mounted on a trolley. As the experimental results show, our planner produces view pose sequences to systematically cover the crops and leads to increased fruit coverage when given a limited time in comparison to a state-of-the-art single next-best view planner.
NeU-NBV: Next Best View Planning Using Uncertainty Estimation in Image-Based Neural Rendering
Mar 02, 2023Autonomous robotic tasks require actively perceiving the environment to achieve application-specific goals. In this paper, we address the problem of positioning an RGB camera to collect the most informative images to represent an unknown scene, given a limited measurement budget. We propose a novel mapless planning framework to iteratively plan the next best camera view based on collected image measurements. A key aspect of our approach is a new technique for uncertainty estimation in image-based neural rendering, which guides measurement acquisition at the most uncertain view among view candidates, thus maximising the information value during data collection. By incrementally adding new measurements into our image collection, our approach efficiently explores an unknown scene in a mapless manner. We show that our uncertainty estimation is generalisable and valuable for view planning in unknown scenes. Our planning experiments using synthetic and real-world data verify that our uncertainty-guided approach finds informative images leading to more accurate scene representations when compared against baselines.
Multi-UAV Adaptive Path Planning Using Deep Reinforcement Learning
Mar 02, 2023Efficient aerial data collection is important in many remote sensing applications. In large-scale monitoring scenarios, deploying a team of unmanned aerial vehicles (UAVs) offers improved spatial coverage and robustness against individual failures. However, a key challenge is cooperative path planning for the UAVs to efficiently achieve a joint mission goal. We propose a novel multi-agent informative path planning approach based on deep reinforcement learning for adaptive terrain monitoring scenarios using UAV teams. We introduce new network feature representations to effectively learn path planning in a 3D workspace. By leveraging a counterfactual baseline, our approach explicitly addresses credit assignment to learn cooperative behaviour. Our experimental evaluation shows improved planning performance, i.e. maps regions of interest more quickly, with respect to non-counterfactual variants. Results on synthetic and real-world data show that our approach has superior performance compared to state-of-the-art non-learning-based methods, while being transferable to varying team sizes and communication constraints.
An Informative Path Planning Framework for Active Learning in UAV-based Semantic Mapping
Feb 07, 2023Unmanned aerial vehicles (UAVs) are crucial for aerial mapping and general monitoring tasks. Recent progress in deep learning enabled automated semantic segmentation of imagery to facilitate the interpretation of large-scale complex environments. Commonly used supervised deep learning for segmentation relies on large amounts of pixel-wise labelled data, which is tedious and costly to annotate. The domain-specific visual appearance of aerial environments often prevents the usage of models pre-trained on a static dataset. To address this, we propose a novel general planning framework for UAVs to autonomously acquire informative training images for model re-training. We leverage multiple acquisition functions and fuse them into probabilistic terrain maps. Our framework combines the mapped acquisition function information into the UAV's planning objectives. In this way, the UAV adaptively acquires informative aerial images to be manually labelled for model re-training. Experimental results on real-world data and in a photorealistic simulation show that our framework maximises model performance and drastically reduces labelling efforts. Our map-based planners outperform state-of-the-art local planning.