 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
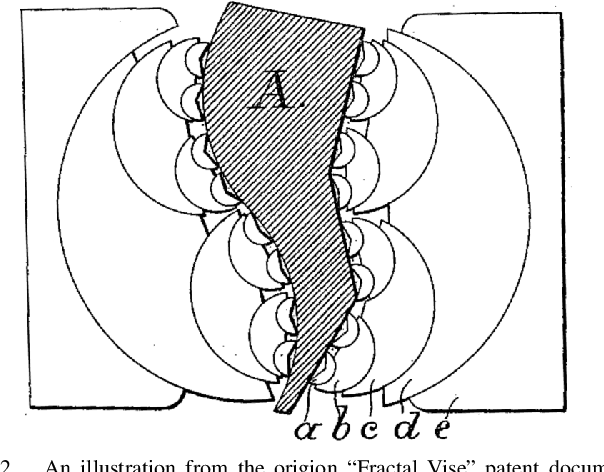
Add to EdgeThe Fractal Hand-II: Reviving a Classic Mechanism for Contemporary Grasping Challenges
Sep 15, 2023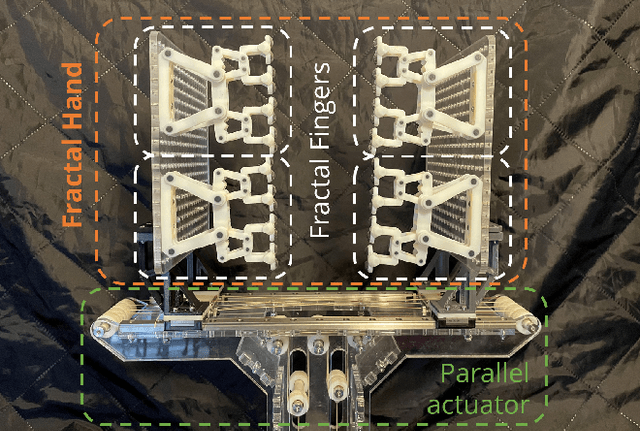
This paper, and its companion, propose a new fractal robotic gripper, drawing inspiration from the century-old Fractal Vise. The unusual synergistic properties allow it to passively conform to diverse objects using only one actuator. Designed to be easily integrated with prevailing parallel jaw grippers, it alleviates the complexities tied to perception and grasp planning, especially when dealing with unpredictable object poses and geometries. We build on the foundational principles of the Fractal Vise to a broader class of gripping mechanisms, and also address the limitations that had led to its obscurity. Two Fractal Fingers, coupled by a closing actuator, can form an adaptive and synergistic Fractal Hand. We articulate a design methodology for low cost, easy to fabricate, large workspace, and compliant Fractal Fingers. The companion paper delves into the kinematics and grasping properties of a specific class of Fractal Fingers and Hands.