 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAI Space Cortex: An Experimental System for Future Era Space Exploration
Jul 09, 2025Our Robust, Explainable Autonomy for Scientific Icy Moon Operations (REASIMO) effort contributes to NASA's Concepts for Ocean worlds Life Detection Technology (COLDTech) program, which explores science platform technologies for ocean worlds such as Europa and Enceladus. Ocean world missions pose significant operational challenges. These include long communication lags, limited power, and lifetime limitations caused by radiation damage and hostile conditions. Given these operational limitations, onboard autonomy will be vital for future Ocean world missions. Besides the management of nominal lander operations, onboard autonomy must react appropriately in the event of anomalies. Traditional spacecraft rely on a transition into 'safe-mode' in which non-essential components and subsystems are powered off to preserve safety and maintain communication with Earth. For a severely time-limited Ocean world mission, resolutions to these anomalies that can be executed without Earth-in-the-loop communication and associated delays are paramount for completion of the mission objectives and science goals. To address these challenges, the REASIMO effort aims to demonstrate a robust level of AI-assisted autonomy for such missions, including the ability to detect and recover from anomalies, and to perform missions based on pre-trained behaviors rather than hard-coded, predetermined logic like all prior space missions. We developed an AI-assisted, personality-driven, intelligent framework for control of an Ocean world mission by combining a mix of advanced technologies. To demonstrate the capabilities of the framework, we perform tests of autonomous sampling operations on a lander-manipulator testbed at the NASA Jet Propulsion Laboratory, approximating possible surface conditions such a mission might encounter.
A Learning-Based Framework for Safe Human-Robot Collaboration with Multiple Backup Control Barrier Functions
Oct 09, 2023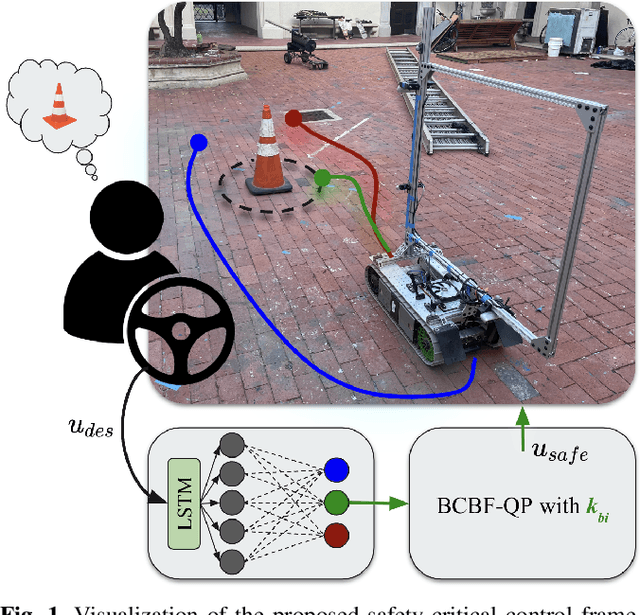
Ensuring robot safety in complex environments is a difficult task due to actuation limits, such as torque bounds. This paper presents a safety-critical control framework that leverages learning-based switching between multiple backup controllers to formally guarantee safety under bounded control inputs while satisfying driver intention. By leveraging backup controllers designed to uphold safety and input constraints, backup control barrier functions (BCBFs) construct implicitly defined control invariance sets via a feasible quadratic program (QP). However, BCBF performance largely depends on the design and conservativeness of the chosen backup controller, especially in our setting of human-driven vehicles in complex, e.g, off-road, conditions. While conservativeness can be reduced by using multiple backup controllers, determining when to switch is an open problem. Consequently, we develop a broadcast scheme that estimates driver intention and integrates BCBFs with multiple backup strategies for human-robot interaction. An LSTM classifier uses data inputs from the robot, human, and safety algorithms to continually choose a backup controller in real-time. We demonstrate our method's efficacy on a dual-track robot in obstacle avoidance scenarios. Our framework guarantees robot safety while adhering to driver intention.
An Active Learning Based Robot Kinematic Calibration Framework Using Gaussian Processes
Mar 07, 2023

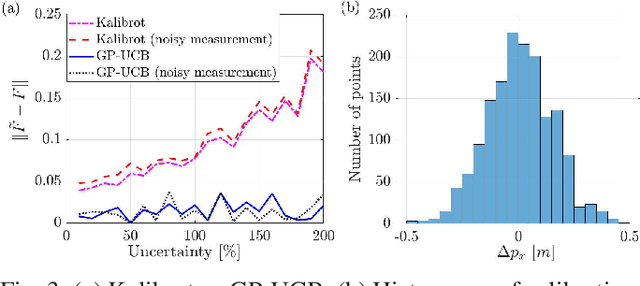

Future NASA lander missions to icy moons will require completely automated, accurate, and data efficient calibration methods for the robot manipulator arms that sample icy terrains in the lander's vicinity. To support this need, this paper presents a Gaussian Process (GP) approach to the classical manipulator kinematic calibration process. Instead of identifying a corrected set of Denavit-Hartenberg kinematic parameters, a set of GPs models the residual kinematic error of the arm over the workspace. More importantly, this modeling framework allows a Gaussian Process Upper Confident Bound (GP-UCB) algorithm to efficiently and adaptively select the calibration's measurement points so as to minimize the number of experiments, and therefore minimize the time needed for recalibration. The method is demonstrated in simulation on a simple 2-DOF arm, a 6 DOF arm whose geometry is a candidate for a future NASA mission, and a 7 DOF Barrett WAM arm.