 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic Tube MPC: Learning Tube Dynamics with Massively Parallel Simulation for Robust Safety in Practice
Paper and Code
Nov 22, 2024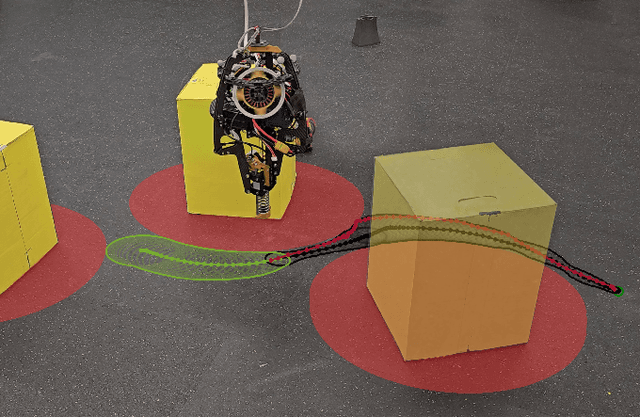
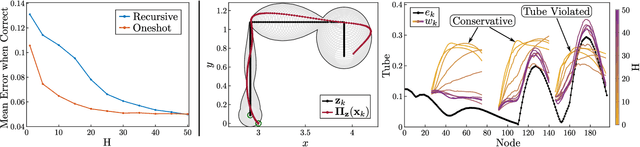
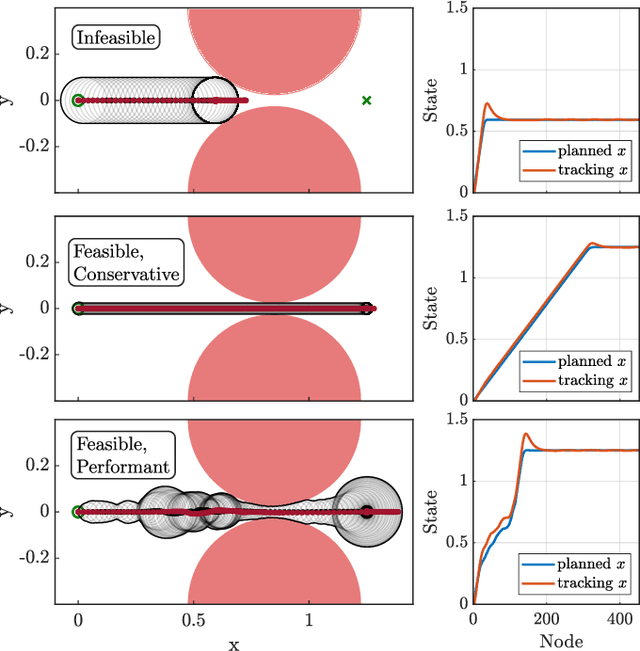
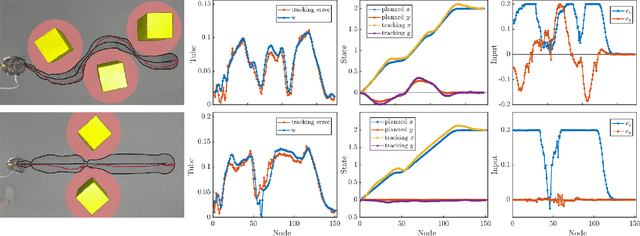
Safe navigation of cluttered environments is a critical challenge in robotics. It is typically approached by separating the planning and tracking problems, with planning executed on a reduced order model to generate reference trajectories, and control techniques used to track these trajectories on the full order dynamics. Inevitable tracking error necessitates robustification of the nominal plan to ensure safety; in many cases, this is accomplished via worst-case bounding, which ignores the fact that some trajectories of the planning model may be easier to track than others. In this work, we present a novel method leveraging massively parallel simulation to learn a dynamic tube representation, which characterizes tracking performance as a function of actions taken by the planning model. Planning model trajectories are then optimized such that the dynamic tube lies in the free space, allowing a balance between performance and safety to be traded off in real time. The resulting Dynamic Tube MPC is applied to the 3D hopping robot ARCHER, enabling agile and performant navigation of cluttered environments, and safe collision-free traversal of narrow corridors.