 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeChasing Autonomy: Dynamic Retargeting and Control Guided RL for Performant and Controllable Humanoid Running
Mar 26, 2026Humanoid robots have the promise of locomoting like humans, including fast and dynamic running. Recently, reinforcement learning (RL) controllers that can mimic human motions have become popular as they can generate very dynamic behaviors, but they are often restricted to single motion play-back which hinders their deployment in long duration and autonomous locomotion. In this paper, we present a pipeline to dynamically retarget human motions through an optimization routine with hard constraints to generate improved periodic reference libraries from a single human demonstration. We then study the effect of both the reference motion and the reward structure on the reference and commanded velocity tracking, concluding that a goal-conditioned and control-guided reward which tracks dynamically optimized human data results in the best performance. We deploy the policy on hardware, demonstrating its speed and endurance by achieving running speeds of up to 3.3 m/s on a Unitree G1 robot and traversing hundreds of meters in real-world environments. Additionally, to demonstrate the controllability of the locomotion, we use the controller in a full perception and planning autonomy stack for obstacle avoidance while running outdoors.
Walk the PLANC: Physics-Guided RL for Agile Humanoid Locomotion on Constrained Footholds
Jan 09, 2026Bipedal humanoid robots must precisely coordinate balance, timing, and contact decisions when locomoting on constrained footholds such as stepping stones, beams, and planks -- even minor errors can lead to catastrophic failure. Classical optimization and control pipelines handle these constraints well but depend on highly accurate mathematical representations of terrain geometry, making them prone to error when perception is noisy or incomplete. Meanwhile, reinforcement learning has shown strong resilience to disturbances and modeling errors, yet end-to-end policies rarely discover the precise foothold placement and step sequencing required for discontinuous terrain. These contrasting limitations motivate approaches that guide learning with physics-based structure rather than relying purely on reward shaping. In this work, we introduce a locomotion framework in which a reduced-order stepping planner supplies dynamically consistent motion targets that steer the RL training process via Control Lyapunov Function (CLF) rewards. This combination of structured footstep planning and data-driven adaptation produces accurate, agile, and hardware-validated stepping-stone locomotion on a humanoid robot, substantially improving reliability compared to conventional model-free reinforcement-learning baselines.
Learning for Layered Safety-Critical Control with Predictive Control Barrier Functions
Dec 05, 2024Safety filters leveraging control barrier functions (CBFs) are highly effective for enforcing safe behavior on complex systems. It is often easier to synthesize CBFs for a Reduced order Model (RoM), and track the resulting safe behavior on the Full order Model (FoM) -- yet gaps between the RoM and FoM can result in safety violations. This paper introduces \emph{predictive CBFs} to address this gap by leveraging rollouts of the FoM to define a predictive robustness term added to the RoM CBF condition. Theoretically, we prove that this guarantees safety in a layered control implementation. Practically, we learn the predictive robustness term through massive parallel simulation with domain randomization. We demonstrate in simulation that this yields safe FoM behavior with minimal conservatism, and experimentally realize predictive CBFs on a 3D hopping robot.
Safety-Critical Controller Synthesis with Reduced-Order Models
Nov 25, 2024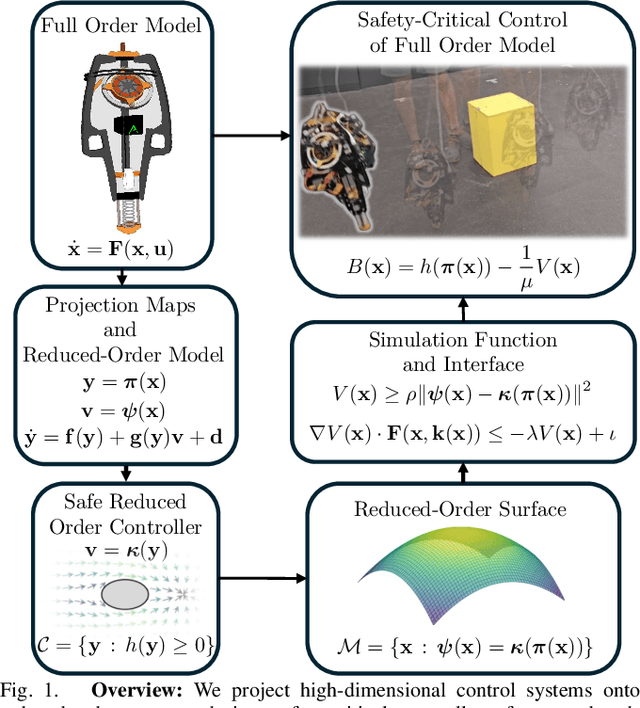
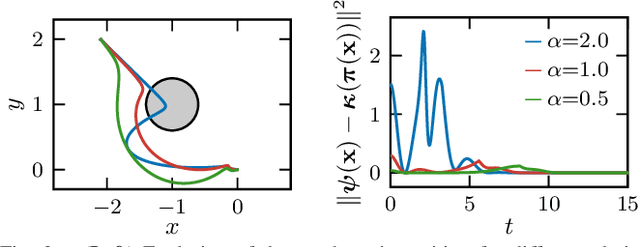
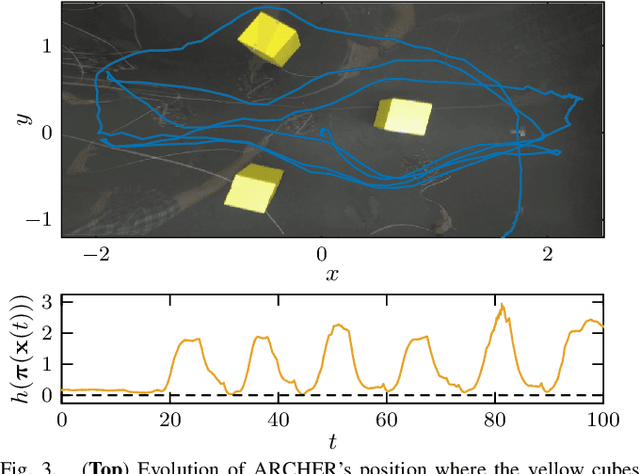
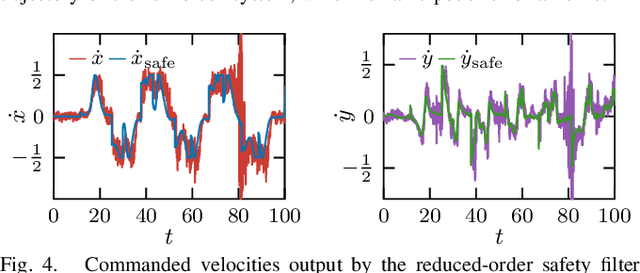
Reduced-order models (ROMs) provide lower dimensional representations of complex systems, capturing their salient features while simplifying control design. Building on previous work, this paper presents an overarching framework for the integration of ROMs and control barrier functions, enabling the use of simplified models to construct safety-critical controllers while providing safety guarantees for complex full-order models. To achieve this, we formalize the connection between full and ROMs by defining projection mappings that relate the states and inputs of these models and leverage simulation functions to establish conditions under which safety guarantees may be transferred from a ROM to its corresponding full-order model. The efficacy of our framework is illustrated through simulation results on a drone and hardware demonstrations on ARCHER, a 3D hopping robot.
Dynamic Tube MPC: Learning Tube Dynamics with Massively Parallel Simulation for Robust Safety in Practice
Nov 22, 2024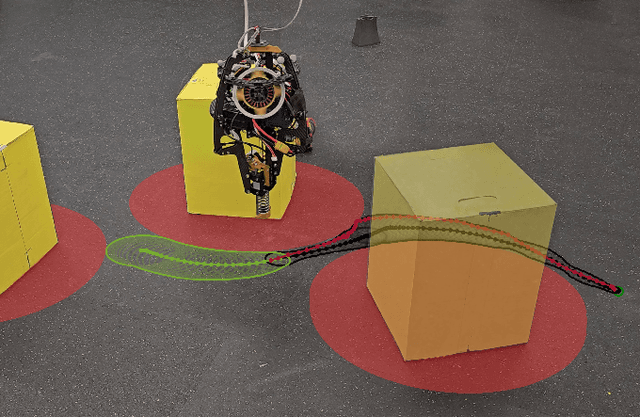
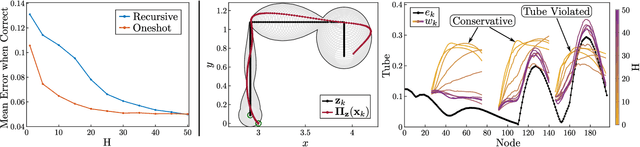
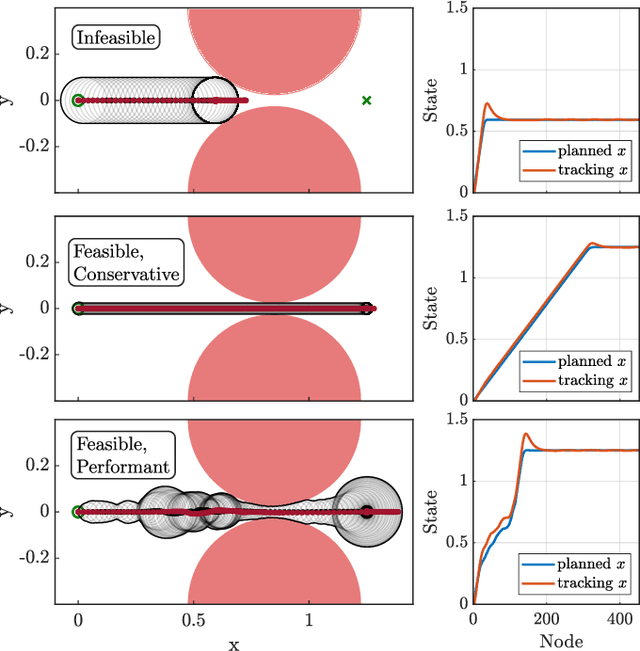
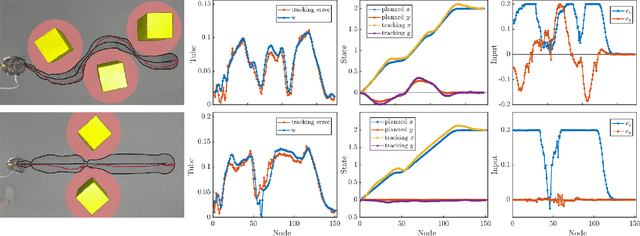
Safe navigation of cluttered environments is a critical challenge in robotics. It is typically approached by separating the planning and tracking problems, with planning executed on a reduced order model to generate reference trajectories, and control techniques used to track these trajectories on the full order dynamics. Inevitable tracking error necessitates robustification of the nominal plan to ensure safety; in many cases, this is accomplished via worst-case bounding, which ignores the fact that some trajectories of the planning model may be easier to track than others. In this work, we present a novel method leveraging massively parallel simulation to learn a dynamic tube representation, which characterizes tracking performance as a function of actions taken by the planning model. Planning model trajectories are then optimized such that the dynamic tube lies in the free space, allowing a balance between performance and safety to be traded off in real time. The resulting Dynamic Tube MPC is applied to the 3D hopping robot ARCHER, enabling agile and performant navigation of cluttered environments, and safe collision-free traversal of narrow corridors.
Dynamically Feasible Path Planning in Cluttered Environments via Reachable Bezier Polytopes
Nov 20, 2024



The deployment of robotic systems in real world environments requires the ability to quickly produce paths through cluttered, non-convex spaces. These planned trajectories must be both kinematically feasible (i.e., collision free) and dynamically feasible (i.e., satisfy the underlying system dynamics), necessitating a consideration of both the free space and the dynamics of the robot in the path planning phase. In this work, we explore the application of reachable Bezier polytopes as an efficient tool for generating trajectories satisfying both kinematic and dynamic requirements. Furthermore, we demonstrate that by offloading specific computation tasks to the GPU, such an algorithm can meet tight real time requirements. We propose a layered control architecture that efficiently produces collision free and dynamically feasible paths for nonlinear control systems, and demonstrate the framework on the tasks of 3D hopping in a cluttered environment.
Robust Agility via Learned Zero Dynamics Policies
Sep 10, 2024We study the design of robust and agile controllers for hybrid underactuated systems. Our approach breaks down the task of creating a stabilizing controller into: 1) learning a mapping that is invariant under optimal control, and 2) driving the actuated coordinates to the output of that mapping. This approach, termed Zero Dynamics Policies, exploits the structure of underactuation by restricting the inputs of the target mapping to the subset of degrees of freedom that cannot be directly actuated, thereby achieving significant dimension reduction. Furthermore, we retain the stability and constraint satisfaction of optimal control while reducing the online computational overhead. We prove that controllers of this type stabilize hybrid underactuated systems and experimentally validate our approach on the 3D hopping platform, ARCHER. Over the course of 3000 hops the proposed framework demonstrates robust agility, maintaining stable hopping while rejecting disturbances on rough terrain.