 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHierarchical Reduced-Order Model Predictive Control for Robust Locomotion on Humanoid Robots
Sep 05, 2025As humanoid robots enter real-world environments, ensuring robust locomotion across diverse environments is crucial. This paper presents a computationally efficient hierarchical control framework for humanoid robot locomotion based on reduced-order models -- enabling versatile step planning and incorporating arm and torso dynamics to better stabilize the walking. At the high level, we use the step-to-step dynamics of the ALIP model to simultaneously optimize over step periods, step lengths, and ankle torques via nonlinear MPC. The ALIP trajectories are used as references to a linear MPC framework that extends the standard SRB-MPC to also include simplified arm and torso dynamics. We validate the performance of our approach through simulation and hardware experiments on the Unitree G1 humanoid robot. In the proposed framework the high-level step planner runs at 40 Hz and the mid-level MPC at 500 Hz using the onboard mini-PC. Adaptive step timing increased the push recovery success rate by 36%, and the upper body control improved the yaw disturbance rejection. We also demonstrate robust locomotion across diverse indoor and outdoor terrains, including grass, stone pavement, and uneven gym mats.
Bracing for Impact: Robust Humanoid Push Recovery and Locomotion with Reduced Order Models
May 16, 2025Push recovery during locomotion will facilitate the deployment of humanoid robots in human-centered environments. In this paper, we present a unified framework for walking control and push recovery for humanoid robots, leveraging the arms for push recovery while dynamically walking. The key innovation is to use the environment, such as walls, to facilitate push recovery by combining Single Rigid Body model predictive control (SRB-MPC) with Hybrid Linear Inverted Pendulum (HLIP) dynamics to enable robust locomotion, push detection, and recovery by utilizing the robot's arms to brace against such walls and dynamically adjusting the desired contact forces and stepping patterns. Extensive simulation results on a humanoid robot demonstrate improved perturbation rejection and tracking performance compared to HLIP alone, with the robot able to recover from pushes up to 100N for 0.2s while walking at commanded speeds up to 0.5m/s. Robustness is further validated in scenarios with angled walls and multi-directional pushes.
Reduced-Order Model Guided Contact-Implicit Model Predictive Control for Humanoid Locomotion
Feb 21, 2025Humanoid robots have great potential for real-world applications due to their ability to operate in environments built for humans, but their deployment is hindered by the challenge of controlling their underlying high-dimensional nonlinear hybrid dynamics. While reduced-order models like the Hybrid Linear Inverted Pendulum (HLIP) are simple and computationally efficient, they lose whole-body expressiveness. Meanwhile, recent advances in Contact-Implicit Model Predictive Control (CI-MPC) enable robots to plan through multiple hybrid contact modes, but remain vulnerable to local minima and require significant tuning. We propose a control framework that combines the strengths of HLIP and CI-MPC. The reduced-order model generates a nominal gait, while CI-MPC manages the whole-body dynamics and modifies the contact schedule as needed. We demonstrate the effectiveness of this approach in simulation with a novel 24 degree-of-freedom humanoid robot: Achilles. Our proposed framework achieves rough terrain walking, disturbance recovery, robustness under model and state uncertainty, and allows the robot to interact with obstacles in the environment, all while running online in real-time at 50 Hz.
Dynamic Walking on Highly Underactuated Point Foot Humanoids: Closing the Loop between HZD and HLIP
Jun 19, 2024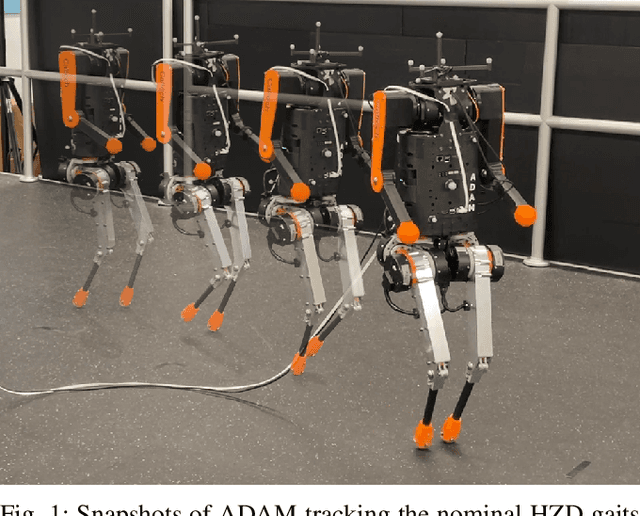
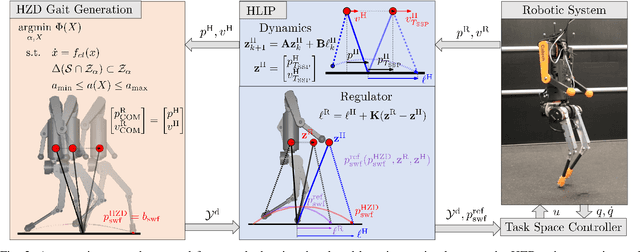
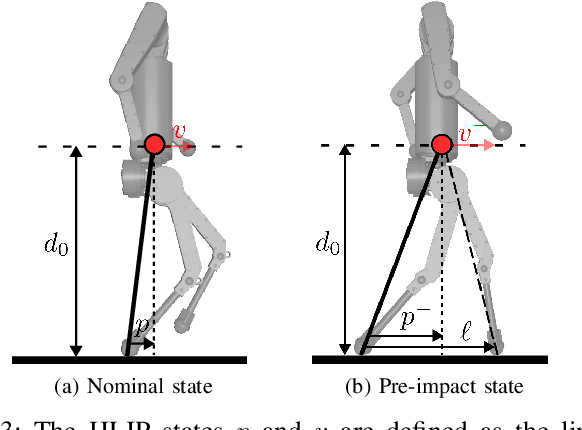
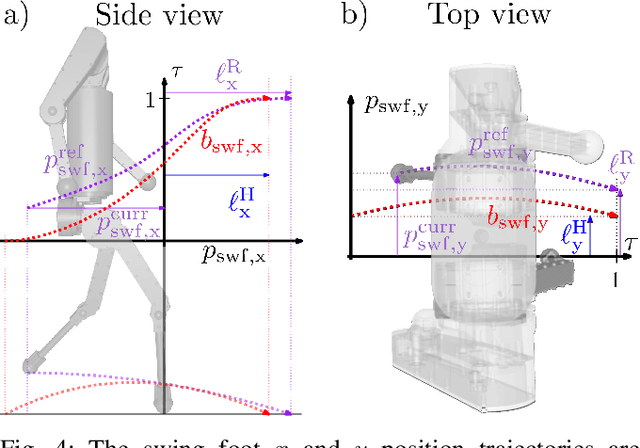
Realizing bipedal locomotion on humanoid robots with point feet is especially challenging due to their highly underactuated nature, high degrees of freedom, and hybrid dynamics resulting from impacts. With the goal of addressing this challenging problem, this paper develops a control framework for realizing dynamic locomotion and implements it on a novel point foot humanoid: ADAM. To this end, we close the loop between Hybrid Zero Dynamics (HZD) and Hybrid linear inverted pendulum (HLIP) based step length regulation. To leverage the full-order hybrid dynamics of the robot, walking gaits are first generated offline by utilizing HZD. These trajectories are stabilized online through the use of a HLIP based regulator. Finally, the planned trajectories are mapped into the full-order system using a task space controller incorporating inverse kinematics. The proposed method is verified through numerical simulations and hardware experiments on the humanoid robot ADAM marking the first humanoid point foot walking. Moreover, we experimentally demonstrate the robustness of the realized walking via the ability to track a desired reference speed, robustness to pushes, and locomotion on uneven terrain.
Humanoid Robot Co-Design: Coupling Hardware Design with Gait Generation via Hybrid Zero Dynamics
Aug 21, 2023



Selecting robot design parameters can be challenging since these parameters are often coupled with the performance of the controller and, therefore, the resulting capabilities of the robot. This leads to a time-consuming and often expensive process whereby one iterates between designing the robot and manually evaluating its capabilities. This is particularly challenging for bipedal robots, where it can be difficult to evaluate the behavior of the system due to the underlying nonlinear and hybrid dynamics. Thus, in an effort to streamline the design process of bipedal robots, and maximize their performance, this paper presents a systematic framework for the co-design of humanoid robots and their associated walking gaits. To this end, we leverage the framework of hybrid zero dynamic (HZD) gait generation, which gives a formal approach to the generation of dynamic walking gaits. The key novelty of this paper is to consider both virtual constraints associated with the actuators of the robot, coupled with design virtual constraints that encode the associated parameters of the robot to be designed. These virtual constraints are combined in an HZD optimization problem which simultaneously determines the design parameters while finding a stable walking gait that minimizes a given cost function. The proposed approach is demonstrated through the design of a novel humanoid robot, ADAM, wherein its thigh and shin are co-designed so as to yield energy efficient bipedal locomotion.