 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic Walking on Highly Underactuated Point Foot Humanoids: Closing the Loop between HZD and HLIP
Paper and Code
Jun 19, 2024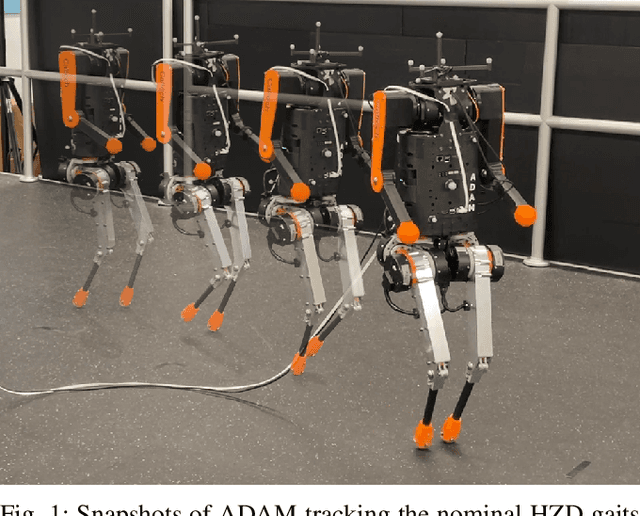
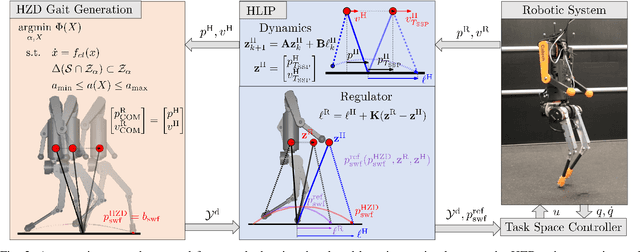
Realizing bipedal locomotion on humanoid robots with point feet is especially challenging due to their highly underactuated nature, high degrees of freedom, and hybrid dynamics resulting from impacts. With the goal of addressing this challenging problem, this paper develops a control framework for realizing dynamic locomotion and implements it on a novel point foot humanoid: ADAM. To this end, we close the loop between Hybrid Zero Dynamics (HZD) and Hybrid linear inverted pendulum (HLIP) based step length regulation. To leverage the full-order hybrid dynamics of the robot, walking gaits are first generated offline by utilizing HZD. These trajectories are stabilized online through the use of a HLIP based regulator. Finally, the planned trajectories are mapped into the full-order system using a task space controller incorporating inverse kinematics. The proposed method is verified through numerical simulations and hardware experiments on the humanoid robot ADAM marking the first humanoid point foot walking. Moreover, we experimentally demonstrate the robustness of the realized walking via the ability to track a desired reference speed, robustness to pushes, and locomotion on uneven terrain.