 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntegrating path-planning and control for robotic unicycles
Jul 03, 2025This article focuses on integrating path-planning and control with specializing on the unique needs of robotic unicycles. A unicycle design is presented which is capable of accelerating/breaking and carrying out a variety of maneuvers. The proposed path-planning method segments the path into straight and curved path sections dedicated for accelerating/breaking and turning maneuvers, respectively. The curvature profiles of the curved sections are optimized while considering the control performance and the slipping limits of the wheel. The performance of the proposed integrated approach is demonstrated via numerical simulations.
Safety-Aware Preference-Based Learning for Safety-Critical Control
Dec 15, 2021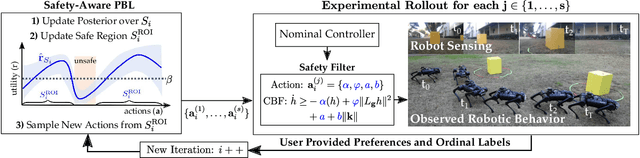
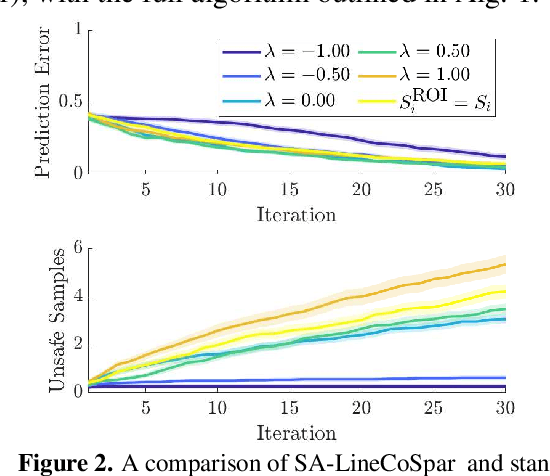
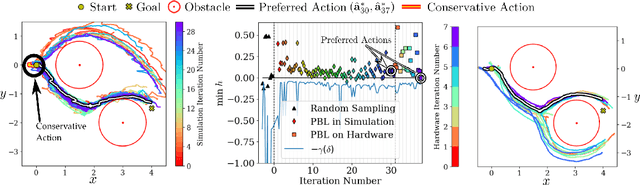
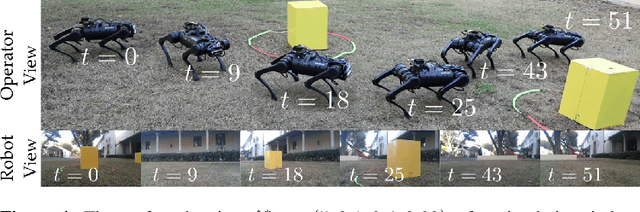
Bringing dynamic robots into the wild requires a tenuous balance between performance and safety. Yet controllers designed to provide robust safety guarantees often result in conservative behavior, and tuning these controllers to find the ideal trade-off between performance and safety typically requires domain expertise or a carefully constructed reward function. This work presents a design paradigm for systematically achieving behaviors that balance performance and robust safety by integrating safety-aware Preference-Based Learning (PBL) with Control Barrier Functions (CBFs). Fusing these concepts -- safety-aware learning and safety-critical control -- gives a robust means to achieve safe behaviors on complex robotic systems in practice. We demonstrate the capability of this design paradigm to achieve safe and performant perception-based autonomous operation of a quadrupedal robot both in simulation and experimentally on hardware.
Safety-Critical Control with Input Delay in Dynamic Environment
Dec 15, 2021



Endowing nonlinear systems with safe behavior is increasingly important in modern control. This task is particularly challenging for real-life control systems that must operate safely in dynamically changing environments. This paper develops a framework for safety-critical control in dynamic environments, by establishing the notion of environmental control barrier functions (ECBFs). The framework is able to guarantee safety even in the presence of input delay, by accounting for the evolution of the environment during the delayed response of the system. The underlying control synthesis relies on predicting the future state of the system and the environment over the delay interval, with robust safety guarantees against prediction errors. The efficacy of the proposed method is demonstrated by a simple adaptive cruise control problem and a more complex robotics application on a Segway platform.
Traffic Forecasting using Vehicle-to-Vehicle Communication
Apr 12, 2021
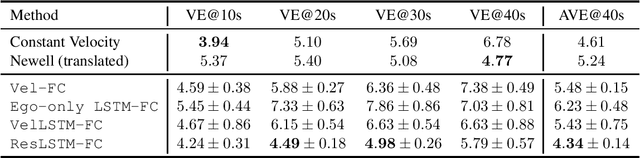
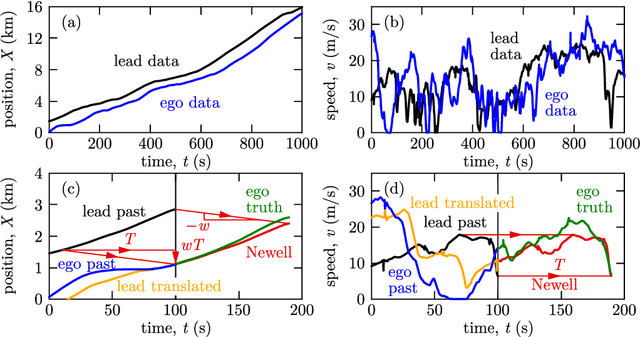

We take the first step in using vehicle-to-vehicle (V2V) communication to provide real-time on-board traffic predictions. In order to best utilize real-world V2V communication data, we integrate first principle models with deep learning. Specifically, we train recurrent neural networks to improve the predictions given by first principle models. Our approach is able to predict the velocity of individual vehicles up to a minute into the future with improved accuracy over first principle-based baselines. We conduct a comprehensive study to evaluate different methods of integrating first principle models with deep learning techniques. The source code for our models is available at https://github.com/Rose-STL-Lab/V2V-traffic-forecast .