 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Robust Output Control Barrier Functions from Safe Expert Demonstrations
Nov 18, 2021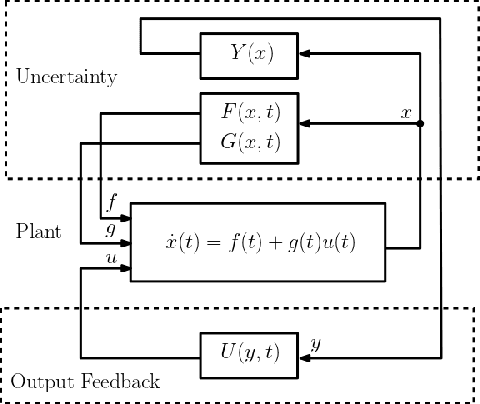
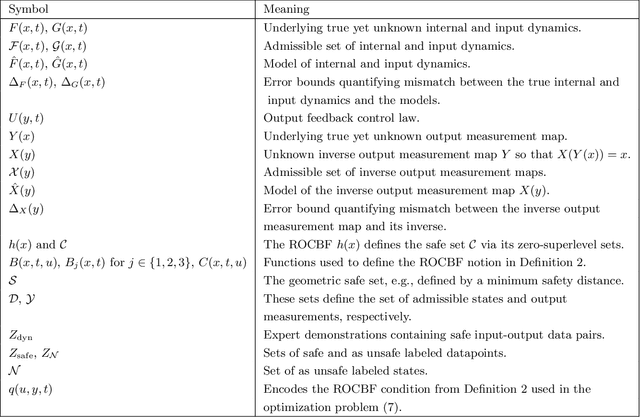
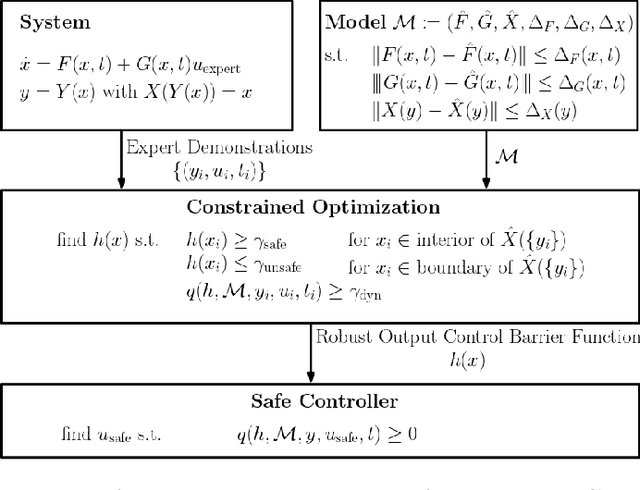
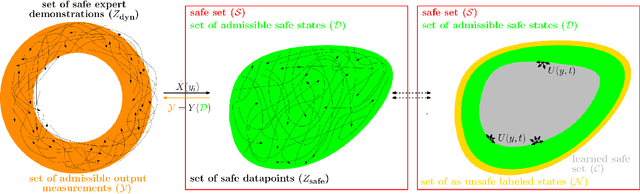
This paper addresses learning safe control laws from expert demonstrations. We assume that appropriate models of the system dynamics and the output measurement map are available, along with corresponding error bounds. We first propose robust output control barrier functions (ROCBFs) as a means to guarantee safety, as defined through controlled forward invariance of a safe set. We then present an optimization problem to learn ROCBFs from expert demonstrations that exhibit safe system behavior, e.g., data collected from a human operator. Along with the optimization problem, we provide verifiable conditions that guarantee validity of the obtained ROCBF. These conditions are stated in terms of the density of the data and on Lipschitz and boundedness constants of the learned function and the models of the system dynamics and the output measurement map. When the parametrization of the ROCBF is linear, then, under mild assumptions, the optimization problem is convex. We validate our findings in the autonomous driving simulator CARLA and show how to learn safe control laws from RGB camera images.
Traffic Forecasting using Vehicle-to-Vehicle Communication
Apr 12, 2021
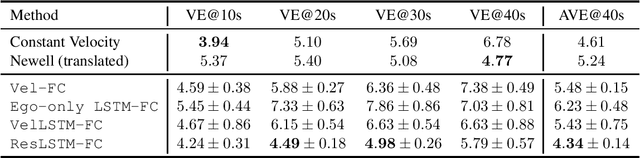
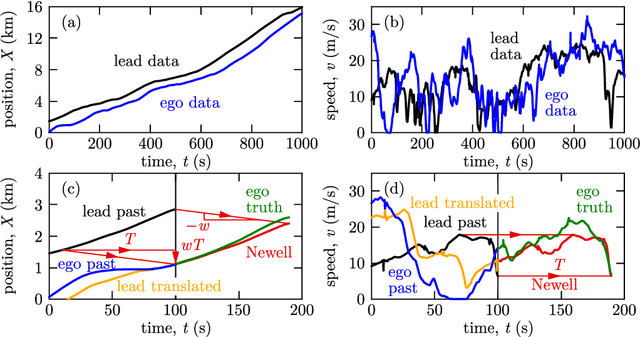

We take the first step in using vehicle-to-vehicle (V2V) communication to provide real-time on-board traffic predictions. In order to best utilize real-world V2V communication data, we integrate first principle models with deep learning. Specifically, we train recurrent neural networks to improve the predictions given by first principle models. Our approach is able to predict the velocity of individual vehicles up to a minute into the future with improved accuracy over first principle-based baselines. We conduct a comprehensive study to evaluate different methods of integrating first principle models with deep learning techniques. The source code for our models is available at https://github.com/Rose-STL-Lab/V2V-traffic-forecast .