 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Trustworthy AIoT-enabled Localization System via Federated Learning and Blockchain
Jul 08, 2024



There is a significant demand for indoor localization technology in smart buildings, and the most promising solution in this field is using RF sensors and fingerprinting-based methods that employ machine learning models trained on crowd-sourced user data gathered from IoT devices. However, this raises security and privacy issues in practice. Some researchers propose to use federated learning to partially overcome privacy problems, but there still remain security concerns, e.g., single-point failure and malicious attacks. In this paper, we propose a framework named DFLoc to achieve precise 3D localization tasks while considering the following two security concerns. Particularly, we design a specialized blockchain to decentralize the framework by distributing the tasks such as model distribution and aggregation which are handled by a central server to all clients in most previous works, to address the issue of the single-point failure for a reliable and accurate indoor localization system. Moreover, we introduce an updated model verification mechanism within the blockchain to alleviate the concern of malicious node attacks. Experimental results substantiate the framework's capacity to deliver accurate 3D location predictions and its superior resistance to the impacts of single-point failure and malicious attacks when compared to conventional centralized federated learning systems.
Traffic Forecasting using Vehicle-to-Vehicle Communication
Apr 12, 2021
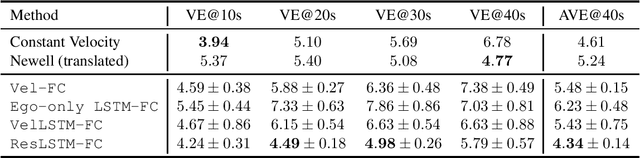
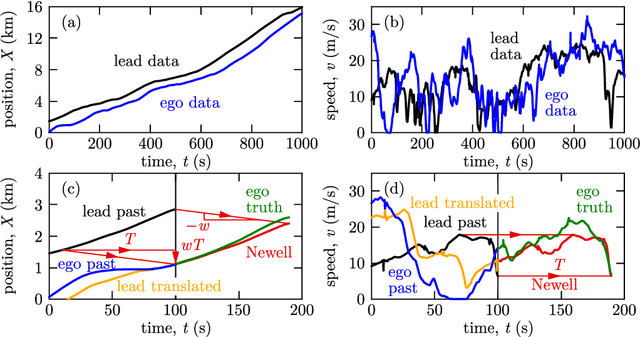

We take the first step in using vehicle-to-vehicle (V2V) communication to provide real-time on-board traffic predictions. In order to best utilize real-world V2V communication data, we integrate first principle models with deep learning. Specifically, we train recurrent neural networks to improve the predictions given by first principle models. Our approach is able to predict the velocity of individual vehicles up to a minute into the future with improved accuracy over first principle-based baselines. We conduct a comprehensive study to evaluate different methods of integrating first principle models with deep learning techniques. The source code for our models is available at https://github.com/Rose-STL-Lab/V2V-traffic-forecast .