 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExperimental Validation of a Safe Controller Integration Scheme for Connected Automated Trucks
Dec 07, 2022

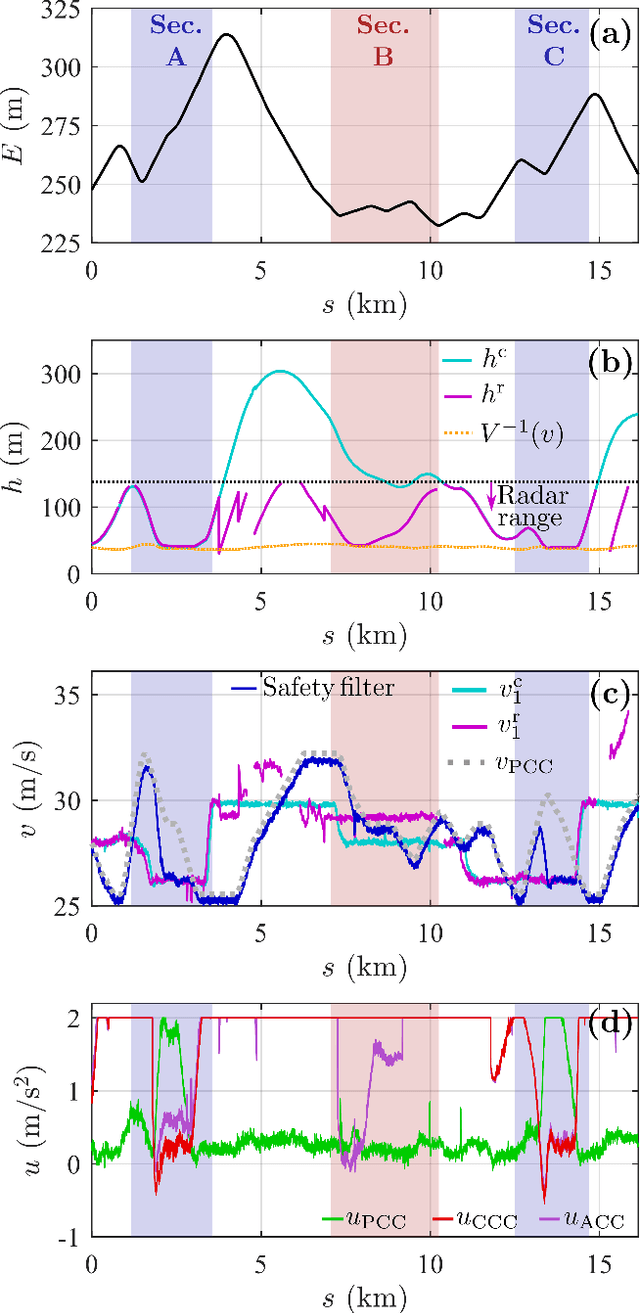
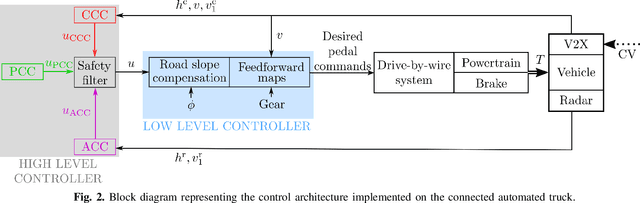
Accomplishing safe and efficient driving is one of the predominant challenges in the controller design of connected automated vehicles (CAVs). It is often more convenient to address these goals separately and integrate the resulting controllers. In this study, we propose a controller integration scheme to fuse performance-based controllers and safety-oriented controllers safely for the longitudinal motion of a CAV. The resulting structure is compatible with a large class of controllers, and offers flexibility to design each controller individually without affecting the performance of the others. We implement the proposed safe integration scheme on a connected automated truck using an optimal-in-energy controller and a safety-oriented connected cruise controller. We validate the premise of the safe integration through experiments with a full-scale truck in two scenarios: a controlled experiment on a test track and a real-world experiment on a public highway. In both scenarios, we achieve energy efficient driving without violating safety.
Control Barrier Functions and Input-to-State Safety with Application to Automated Vehicles
Jun 07, 2022

Balancing safety and performance is one of the predominant challenges in modern control system design. Moreover, it is crucial to robustly ensure safety without inducing unnecessary conservativeness that degrades performance. In this work we present a constructive approach for safety-critical control synthesis via Control Barrier Functions (CBF). By filtering a hand-designed controller via a CBF, we are able to attain performant behavior while providing rigorous guarantees of safety. In the face of disturbances, robust safety and performance are simultaneously achieved through the notion of Input-to-State Safety (ISSf). We take a tutorial approach by developing the CBF-design methodology in parallel with an inverted pendulum example, making the challenges and sensitivities in the design process concrete. To establish the capability of the proposed approach, we consider the practical setting of safety-critical design via CBFs for a connected automated vehicle (CAV) in the form of a class-8 truck without a trailer. Through experimentation we see the impact of unmodeled disturbances in the truck's actuation system on the safety guarantees provided by CBFs. We characterize these disturbances and using ISSf, produce a robust controller that achieves safety without conceding performance. We evaluate our design both in simulation, and for the first time on an automotive system, experimentally.
Input-to-State Safety with Input Delay in Longitudinal Vehicle Control
May 29, 2022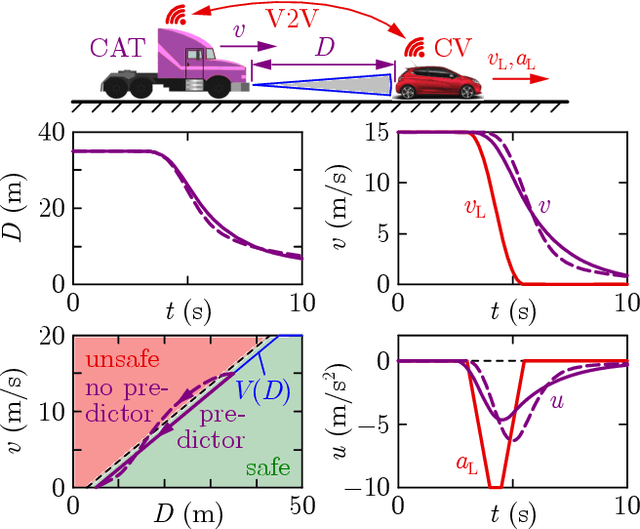
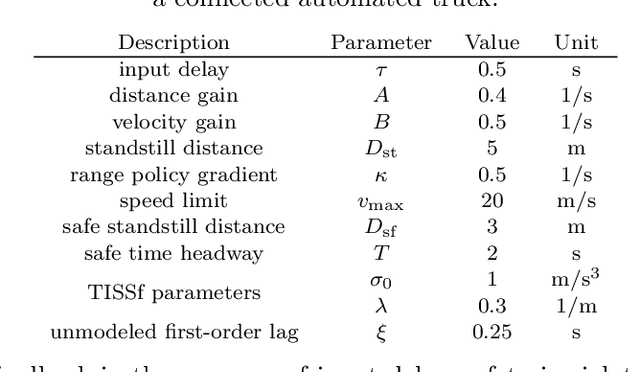
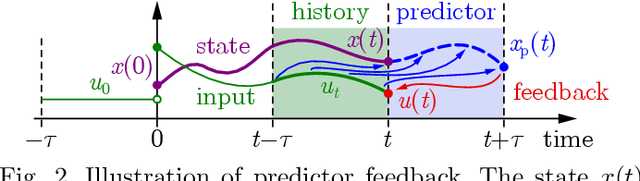

Safe longitudinal control is discussed for a connected automated truck traveling behind a preceding connected vehicle. A controller is proposed based on control barrier function theory and predictor feedback for provably safe, collision-free behavior by taking into account the significant response time of the truck as input delay and the uncertainty of its dynamical model as input disturbance. The benefits of the proposed controller compared to control designs that neglect the delay or treat the delay as disturbance are shown by numerical simulations.
Safety-Aware Preference-Based Learning for Safety-Critical Control
Dec 15, 2021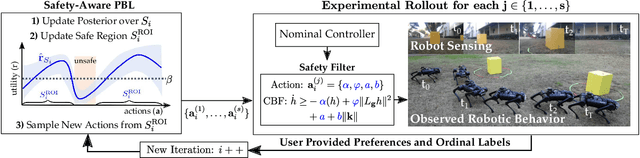
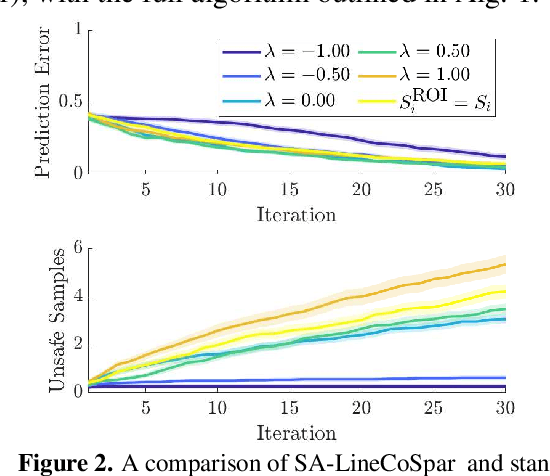
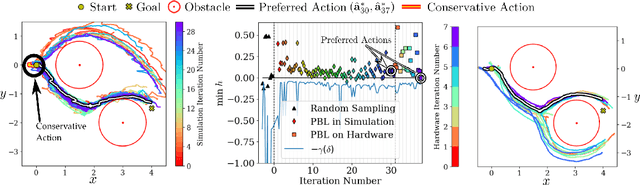
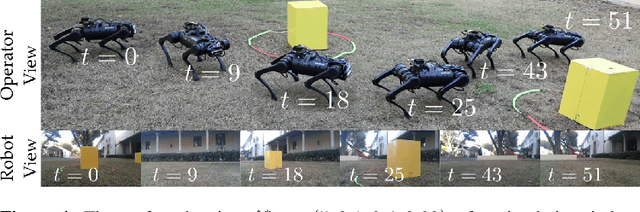
Bringing dynamic robots into the wild requires a tenuous balance between performance and safety. Yet controllers designed to provide robust safety guarantees often result in conservative behavior, and tuning these controllers to find the ideal trade-off between performance and safety typically requires domain expertise or a carefully constructed reward function. This work presents a design paradigm for systematically achieving behaviors that balance performance and robust safety by integrating safety-aware Preference-Based Learning (PBL) with Control Barrier Functions (CBFs). Fusing these concepts -- safety-aware learning and safety-critical control -- gives a robust means to achieve safe behaviors on complex robotic systems in practice. We demonstrate the capability of this design paradigm to achieve safe and performant perception-based autonomous operation of a quadrupedal robot both in simulation and experimentally on hardware.