Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInput-to-State Safety with Input Delay in Longitudinal Vehicle Control
Paper and Code
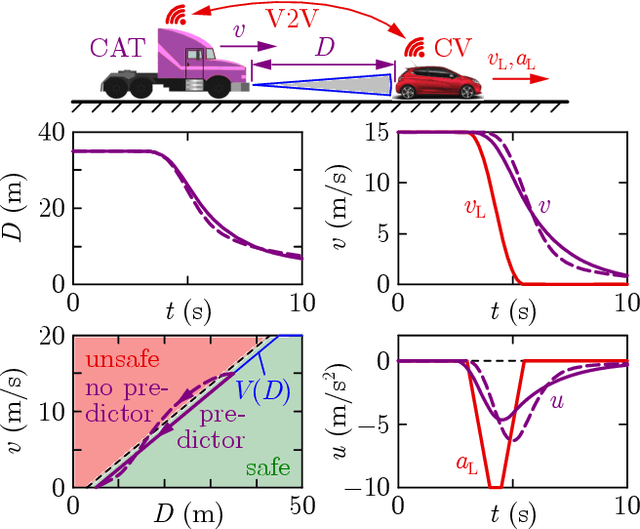

Safe longitudinal control is discussed for a connected automated truck traveling behind a preceding connected vehicle. A controller is proposed based on control barrier function theory and predictor feedback for provably safe, collision-free behavior by taking into account the significant response time of the truck as input delay and the uncertainty of its dynamical model as input disturbance. The benefits of the proposed controller compared to control designs that neglect the delay or treat the delay as disturbance are shown by numerical simulations.
* Submitted to the 17th IFAC Workshop on Time Delay Systems. 6 pages, 3
figures
View paper on