 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSharable Clothoid-based Continuous Motion Planning for Connected Automated Vehicles
Dec 18, 2023



A continuous motion planning method for connected automated vehicles is considered for generating feasible trajectories in real-time using three consecutive clothoids. The proposed method reduces path planning to a small set of nonlinear algebraic equations such that the generated path can be efficiently checked for feasibility and collision. After path planning, velocity planning is executed while maintaining a parallel simple structure. Key strengths of this framework include its interpretability, shareability, and ability to specify boundary conditions. Its interpretability and shareability stem from the succinct representation of the resulting local motion plan using a handful of physically meaningful parameters. Vehicles may share these parameters via V2X communication so that the recipients can precisely reconstruct the planned trajectory of the senders and respond accordingly. The proposed local planner guarantees the satisfaction of boundary conditions, thus ensuring seamless integration with a wide array of higher-level global motion planners. The tunable nature of the method enables tailoring the local plans to specific maneuvers like turns at intersections, lane changes, and U-turns.
On the Safety of Connected Cruise Control: Analysis and Synthesis with Control Barrier Functions
Aug 31, 2023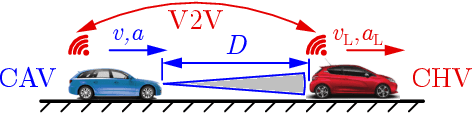
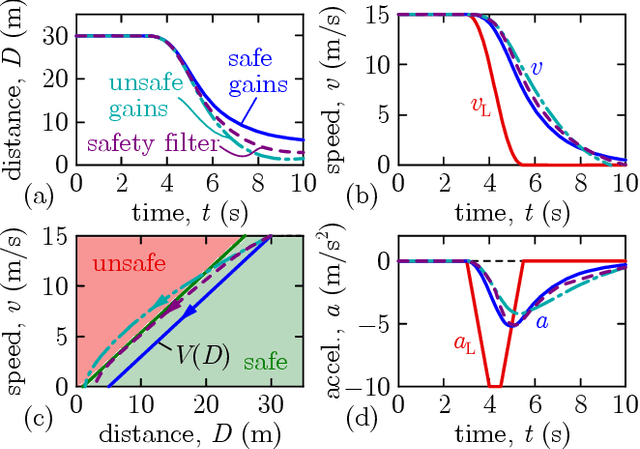
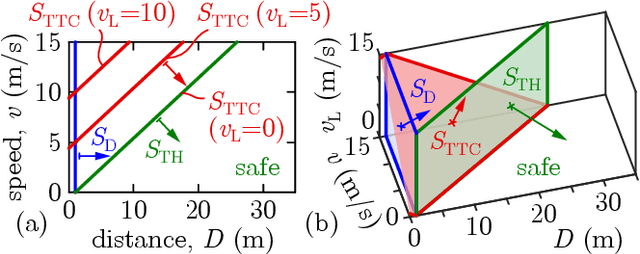
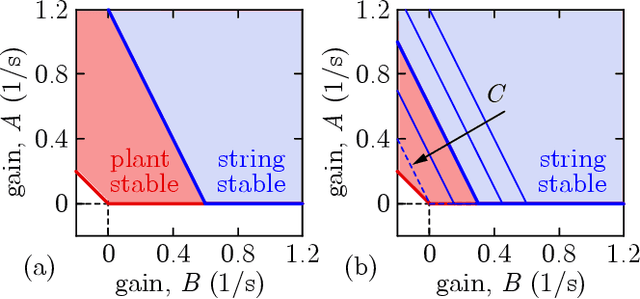
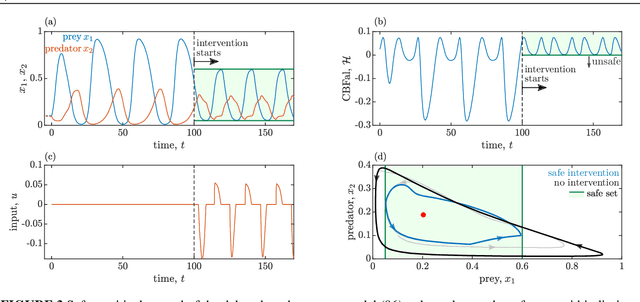
Connected automated vehicles have shown great potential to improve the efficiency of transportation systems in terms of passenger comfort, fuel economy, stability of driving behavior and mitigation of traffic congestions. Yet, to deploy these vehicles and leverage their benefits, the underlying algorithms must ensure their safe operation. In this paper, we address the safety of connected cruise control strategies for longitudinal car following using control barrier function (CBF) theory. In particular, we consider various safety measures such as minimum distance, time headway and time to conflict, and provide a formal analysis of these measures through the lens of CBFs. Additionally, motivated by how stability charts facilitate stable controller design, we derive safety charts for existing connected cruise controllers to identify safe choices of controller parameters. Finally, we combine the analysis of safety measures and the corresponding stability charts to synthesize safety-critical connected cruise controllers using CBFs. We verify our theoretical results by numerical simulations.
Experimental Validation of a Safe Controller Integration Scheme for Connected Automated Trucks
Dec 07, 2022

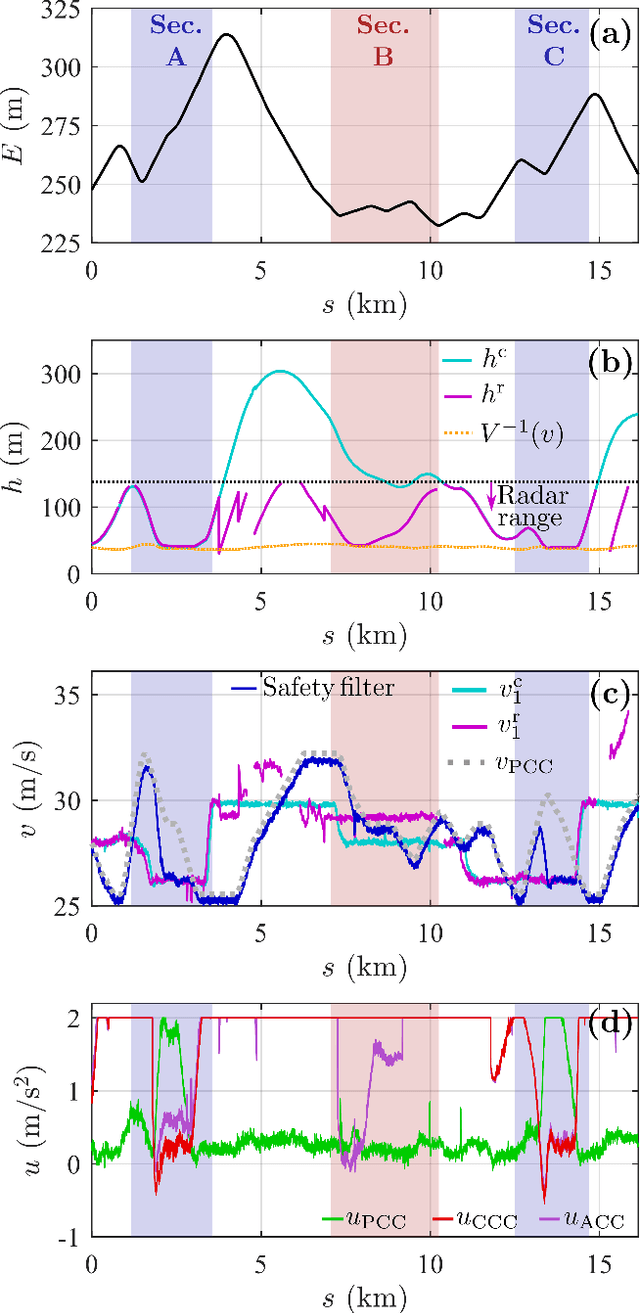
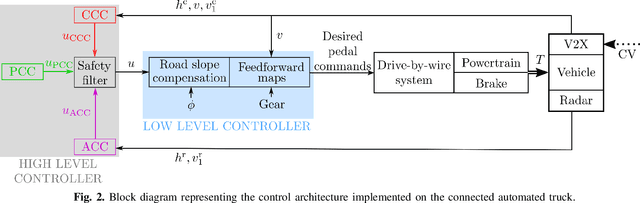
Accomplishing safe and efficient driving is one of the predominant challenges in the controller design of connected automated vehicles (CAVs). It is often more convenient to address these goals separately and integrate the resulting controllers. In this study, we propose a controller integration scheme to fuse performance-based controllers and safety-oriented controllers safely for the longitudinal motion of a CAV. The resulting structure is compatible with a large class of controllers, and offers flexibility to design each controller individually without affecting the performance of the others. We implement the proposed safe integration scheme on a connected automated truck using an optimal-in-energy controller and a safety-oriented connected cruise controller. We validate the premise of the safe integration through experiments with a full-scale truck in two scenarios: a controlled experiment on a test track and a real-world experiment on a public highway. In both scenarios, we achieve energy efficient driving without violating safety.
Connected Cruise and Traffic Control for Pairs of Connected Automated Vehicles
Dec 04, 2022
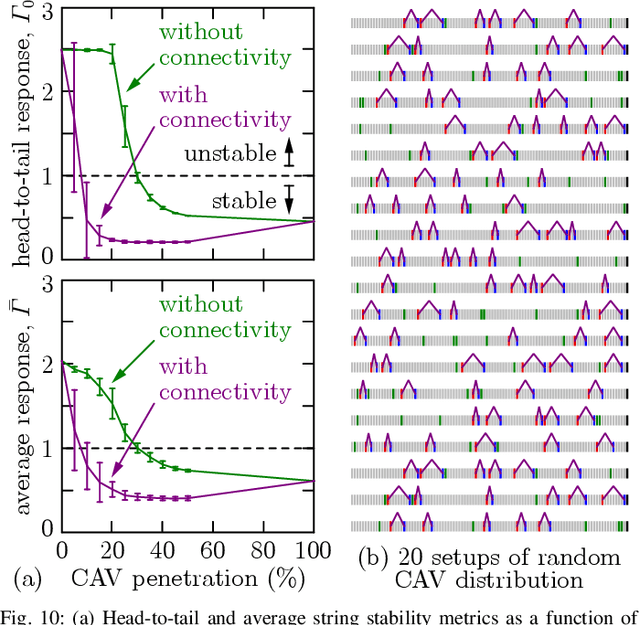
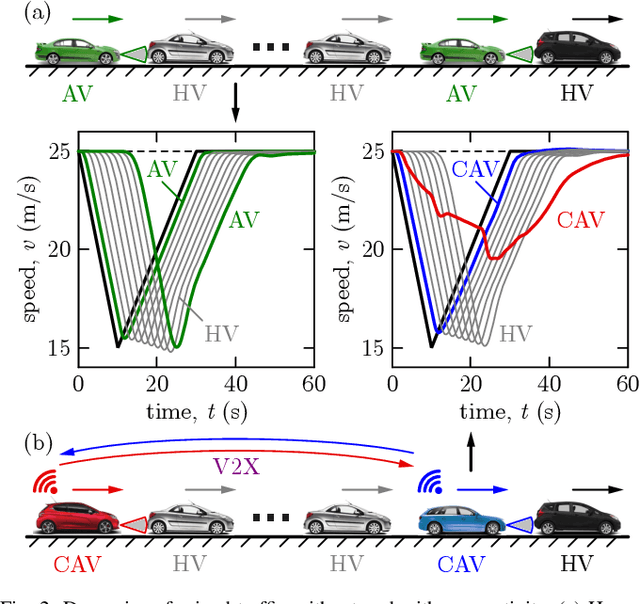
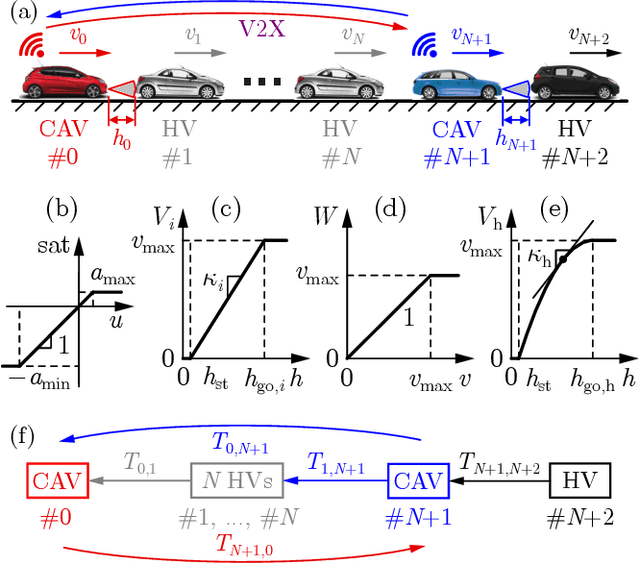
This paper considers mixed traffic consisting of connected automated vehicles equipped with vehicle-to-everything (V2X) connectivity and human-driven vehicles. A control strategy is proposed for communicating pairs of connected automated vehicles, where the two vehicles regulate their longitudinal motion by responding to each other, and, at the same time, stabilize the human-driven traffic between them. Stability analysis is conducted to find stabilizing controllers, and simulations are used to show the efficacy of the proposed approach. The impact of the penetration of connectivity and automation on the string stability of traffic is quantified. It is shown that, even with moderate penetration, connected automated vehicle pairs executing the proposed controllers achieve significant benefits compared to when these vehicles are disconnected and controlled independently.
Learning Time Delay Systems with Neural Ordinary Differential Equations
Jun 28, 2022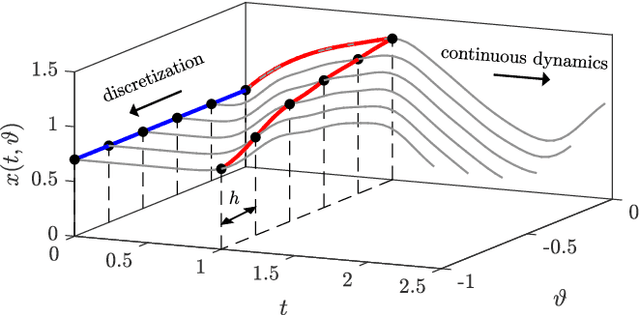
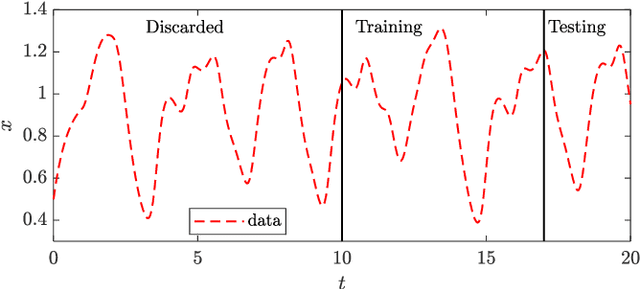
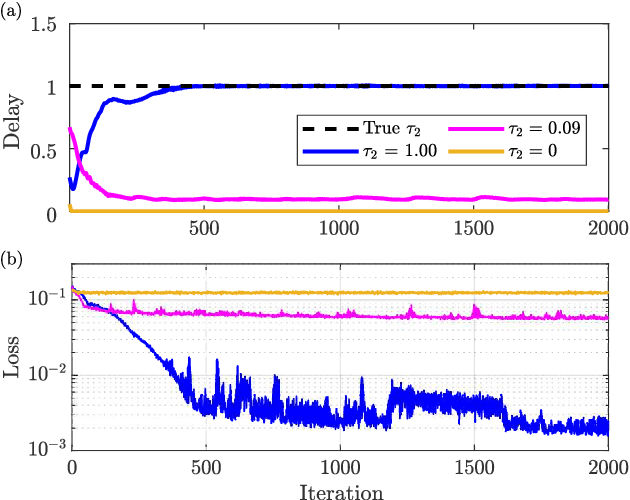
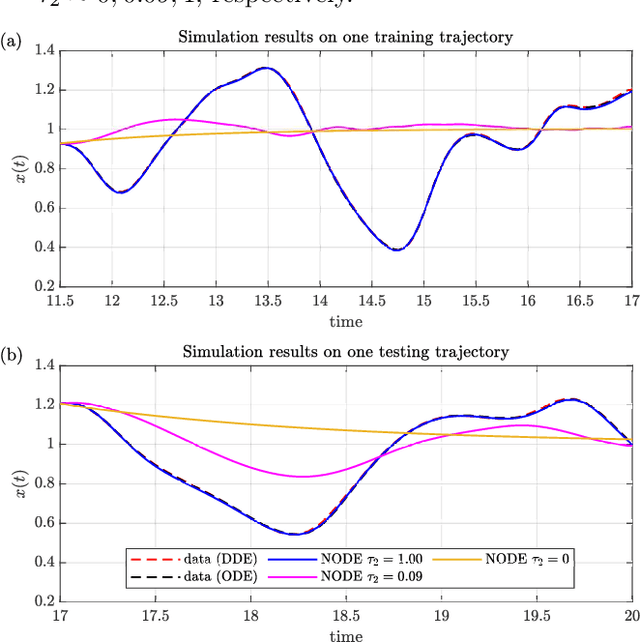
A novel way of using neural networks to learn the dynamics of time delay systems from sequential data is proposed. A neural network with trainable delays is used to approximate the right hand side of a delay differential equation. We relate the delay differential equation to an ordinary differential equation by discretizing the time history and train the corresponding neural ordinary differential equation (NODE) to learn the dynamics. An example on learning the dynamics of the Mackey-Glass equation using data from chaotic behavior is given. After learning both the nonlinearity and the time delay, we demonstrate that the bifurcation diagram of the neural network matches that of the original system.
Control Barrier Functionals: Safety-critical Control for Time Delay Systems
Jun 16, 2022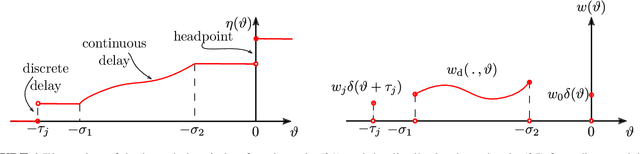
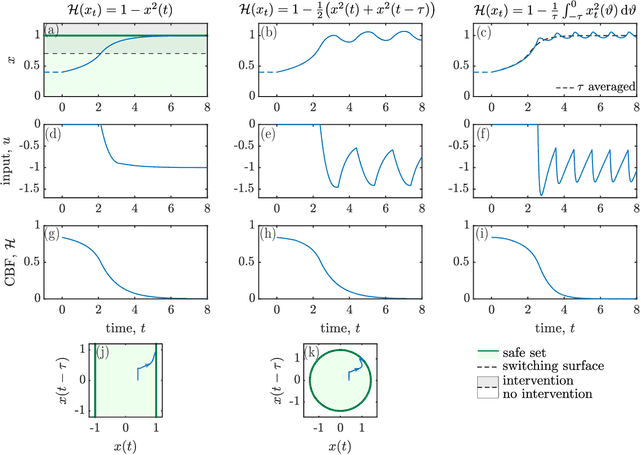
This work presents a theoretical framework for the safety-critical control of time delay systems. The theory of control barrier functions, that provides formal safety guarantees for delay-free systems, is extended to systems with state delay. The notion of control barrier functionals is introduced to attain formal safety guarantees, by enforcing the forward invariance of safe sets defined in the infinite dimensional state space. The proposed framework is able to handle multiple delays and distributed delays both in the dynamics and in the safety condition, and provides an affine constraint on the control input that yields provable safety. This constraint can be incorporated into optimization problems to synthesize pointwise optimal and provable safe controllers. The applicability of the proposed method is demonstrated by numerical simulation examples.
Control Barrier Functions and Input-to-State Safety with Application to Automated Vehicles
Jun 07, 2022

Balancing safety and performance is one of the predominant challenges in modern control system design. Moreover, it is crucial to robustly ensure safety without inducing unnecessary conservativeness that degrades performance. In this work we present a constructive approach for safety-critical control synthesis via Control Barrier Functions (CBF). By filtering a hand-designed controller via a CBF, we are able to attain performant behavior while providing rigorous guarantees of safety. In the face of disturbances, robust safety and performance are simultaneously achieved through the notion of Input-to-State Safety (ISSf). We take a tutorial approach by developing the CBF-design methodology in parallel with an inverted pendulum example, making the challenges and sensitivities in the design process concrete. To establish the capability of the proposed approach, we consider the practical setting of safety-critical design via CBFs for a connected automated vehicle (CAV) in the form of a class-8 truck without a trailer. Through experimentation we see the impact of unmodeled disturbances in the truck's actuation system on the safety guarantees provided by CBFs. We characterize these disturbances and using ISSf, produce a robust controller that achieves safety without conceding performance. We evaluate our design both in simulation, and for the first time on an automotive system, experimentally.
Input-to-State Safety with Input Delay in Longitudinal Vehicle Control
May 29, 2022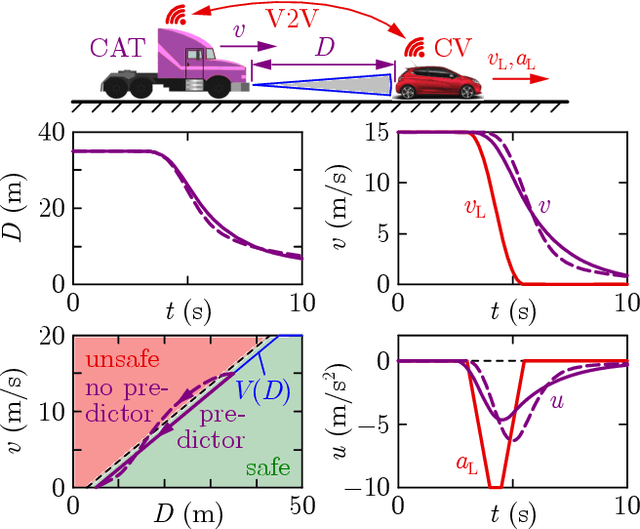
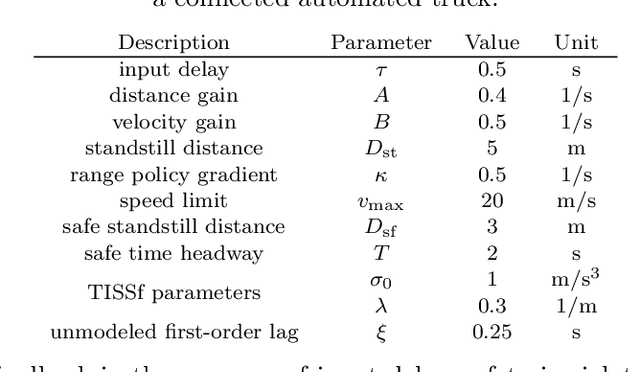
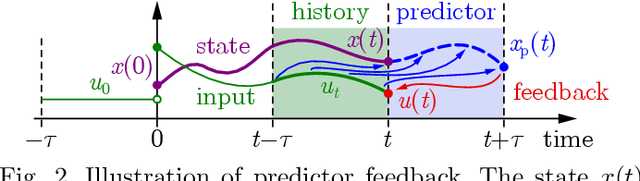

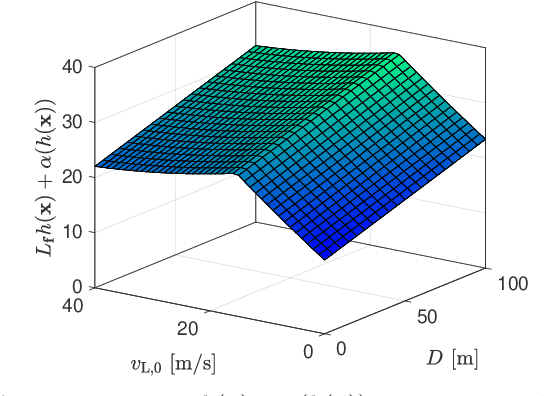
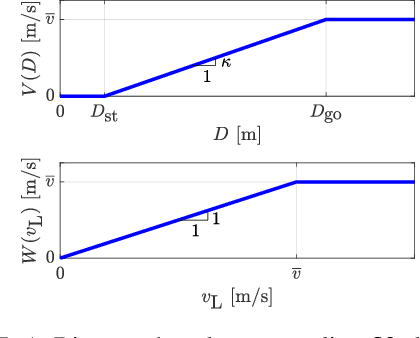
Safe longitudinal control is discussed for a connected automated truck traveling behind a preceding connected vehicle. A controller is proposed based on control barrier function theory and predictor feedback for provably safe, collision-free behavior by taking into account the significant response time of the truck as input delay and the uncertainty of its dynamical model as input disturbance. The benefits of the proposed controller compared to control designs that neglect the delay or treat the delay as disturbance are shown by numerical simulations.
Virtual Rings on Highways: Traffic Control by Connected Automated Vehicles
Apr 24, 2022



This work gives introduction to traffic control by connected automated vehicles. The influence of vehicle control on vehicular traffic and traffic control strategies are discussed and compared. It is highlighted that vehicle-to-everything connectivity allows connected automated vehicles to access the state of the traffic behind them such that feedback can be utilized to mitigate evolving congestions. Numerical simulations demonstrate that such connectivity-based traffic control is beneficial for smoothness and energy efficiency of highway traffic. The dynamics and stability of traffic flow, under the proposed controllers, are analyzed in detail to construct stability charts that guide the selection of stabilizing control gains.
Control Regularization for Reduced Variance Reinforcement Learning
May 14, 2019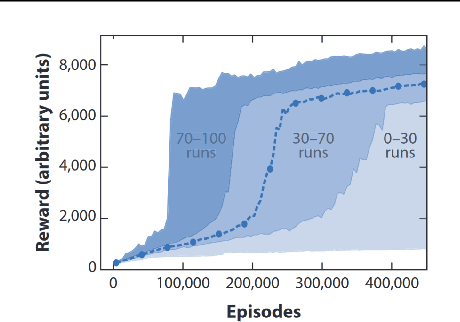
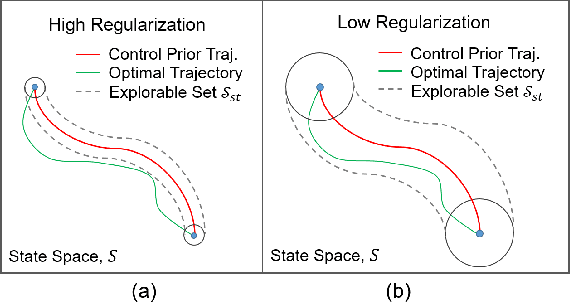
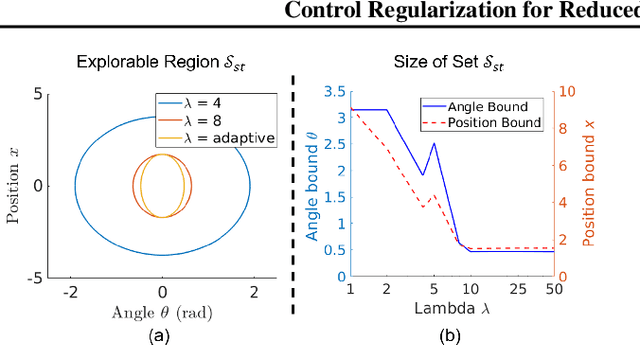
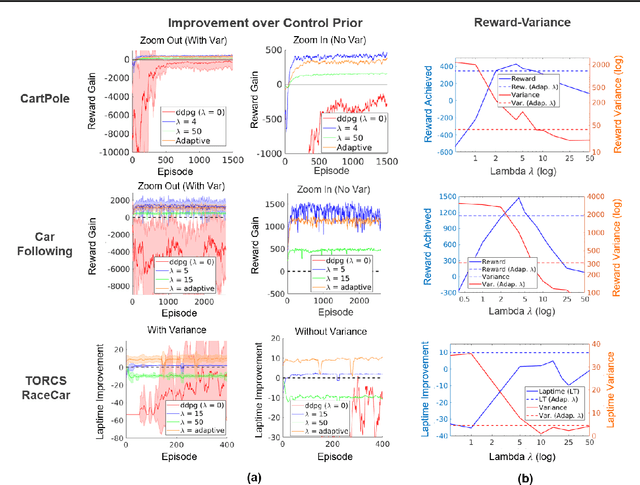
Dealing with high variance is a significant challenge in model-free reinforcement learning (RL). Existing methods are unreliable, exhibiting high variance in performance from run to run using different initializations/seeds. Focusing on problems arising in continuous control, we propose a functional regularization approach to augmenting model-free RL. In particular, we regularize the behavior of the deep policy to be similar to a policy prior, i.e., we regularize in function space. We show that functional regularization yields a bias-variance trade-off, and propose an adaptive tuning strategy to optimize this trade-off. When the policy prior has control-theoretic stability guarantees, we further show that this regularization approximately preserves those stability guarantees throughout learning. We validate our approach empirically on a range of settings, and demonstrate significantly reduced variance, guaranteed dynamic stability, and more efficient learning than deep RL alone.