 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Koopman-based Control of Quality Variation in Multistage Manufacturing Systems
Jul 24, 2024This paper presents a modeling-control synthesis to address the quality control challenges in multistage manufacturing systems (MMSs). A new feedforward control scheme is developed to minimize the quality variations caused by process disturbances in MMSs. Notably, the control framework leverages a stochastic deep Koopman (SDK) model to capture the quality propagation mechanism in the MMSs, highlighted by its ability to transform the nonlinear propagation dynamics into a linear one. Two roll-to-roll case studies are presented to validate the proposed method and demonstrate its effectiveness. The overall method is suitable for nonlinear MMSs and does not require extensive expert knowledge.
Efficient Motion Planning for Manipulators with Control Barrier Function-Induced Neural Controller
Apr 01, 2024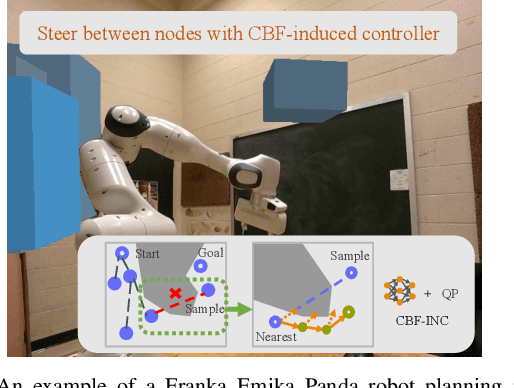
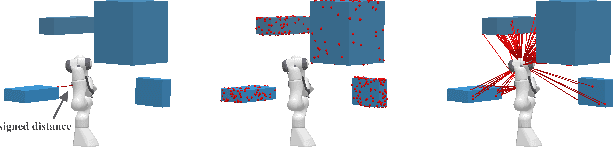
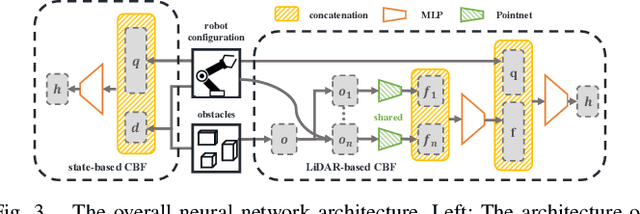
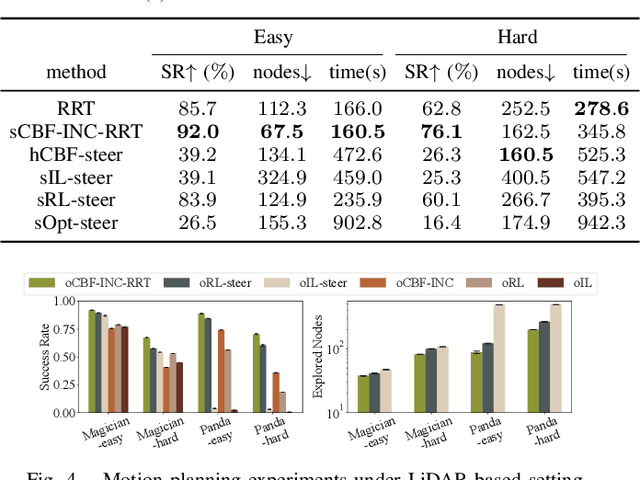
Sampling-based motion planning methods for manipulators in crowded environments often suffer from expensive collision checking and high sampling complexity, which make them difficult to use in real time. To address this issue, we propose a new generalizable control barrier function (CBF)-based steering controller to reduce the number of samples needed in a sampling-based motion planner RRT. Our method combines the strength of CBF for real-time collision-avoidance control and RRT for long-horizon motion planning, by using CBF-induced neural controller (CBF-INC) to generate control signals that steer the system towards sampled configurations by RRT. CBF-INC is learned as Neural Networks and has two variants handling different inputs, respectively: state (signed distance) input and point-cloud input from LiDAR. In the latter case, we also study two different settings: fully and partially observed environmental information. Compared to manually crafted CBF which suffers from over-approximating robot geometry, CBF-INC can balance safety and goal-reaching better without being over-conservative. Given state-based input, our neural CBF-induced neural controller-enhanced RRT (CBF-INC-RRT) can increase the success rate by 14% while reducing the number of nodes explored by 30%, compared with vanilla RRT on hard test cases. Given LiDAR input where vanilla RRT is not directly applicable, we demonstrate that our CBF-INC-RRT can improve the success rate by 10%, compared with planning with other steering controllers. Our project page with supplementary material is at https://mit-realm.github.io/CBF-INC-RRT-website/.
C3D: Cascade Control with Change Point Detection and Deep Koopman Learning for Autonomous Surface Vehicles
Mar 14, 2024In this paper, we discuss the development and deployment of a robust autonomous system capable of performing various tasks in the maritime domain under unknown dynamic conditions. We investigate a data-driven approach based on modular design for ease of transfer of autonomy across different maritime surface vessel platforms. The data-driven approach alleviates issues related to a priori identification of system models that may become deficient under evolving system behaviors or shifting, unanticipated, environmental influences. Our proposed learning-based platform comprises a deep Koopman system model and a change point detector that provides guidance on domain shifts prompting relearning under severe exogenous and endogenous perturbations. Motion control of the autonomous system is achieved via an optimal controller design. The Koopman linearized model naturally lends itself to a linear-quadratic regulator (LQR) control design. We propose the C3D control architecture Cascade Control with Change Point Detection and Deep Koopman Learning. The framework is verified in station keeping task on an ASV in both simulation and real experiments. The approach achieved at least 13.9 percent improvement in mean distance error in all test cases compared to the methods that do not consider system changes.
Inherent Diverse Redundant Safety Mechanisms for AI-based Software Elements in Automotive Applications
Feb 29, 2024This paper explores the role and challenges of Artificial Intelligence (AI) algorithms, specifically AI-based software elements, in autonomous driving systems. These AI systems are fundamental in executing real-time critical functions in complex and high-dimensional environments. They handle vital tasks like multi-modal perception, cognition, and decision-making tasks such as motion planning, lane keeping, and emergency braking. A primary concern relates to the ability (and necessity) of AI models to generalize beyond their initial training data. This generalization issue becomes evident in real-time scenarios, where models frequently encounter inputs not represented in their training or validation data. In such cases, AI systems must still function effectively despite facing distributional or domain shifts. This paper investigates the risk associated with overconfident AI models in safety-critical applications like autonomous driving. To mitigate these risks, methods for training AI models that help maintain performance without overconfidence are proposed. This involves implementing certainty reporting architectures and ensuring diverse training data. While various distribution-based methods exist to provide safety mechanisms for AI models, there is a noted lack of systematic assessment of these methods, especially in the context of safety-critical automotive applications. Many methods in the literature do not adapt well to the quick response times required in safety-critical edge applications. This paper reviews these methods, discusses their suitability for safety-critical applications, and highlights their strengths and limitations. The paper also proposes potential improvements to enhance the safety and reliability of AI algorithms in autonomous vehicles in the context of rapid and accurate decision-making processes.
Communication-Efficient Multimodal Federated Learning: Joint Modality and Client Selection
Jan 30, 2024



Multimodal federated learning (FL) aims to enrich model training in FL settings where clients are collecting measurements across multiple modalities. However, key challenges to multimodal FL remain unaddressed, particularly in heterogeneous network settings where: (i) the set of modalities collected by each client will be diverse, and (ii) communication limitations prevent clients from uploading all their locally trained modality models to the server. In this paper, we propose multimodal Federated learning with joint Modality and Client selection (mmFedMC), a new FL methodology that can tackle the above-mentioned challenges in multimodal settings. The joint selection algorithm incorporates two main components: (a) A modality selection methodology for each client, which weighs (i) the impact of the modality, gauged by Shapley value analysis, (ii) the modality model size as a gauge of communication overhead, against (iii) the frequency of modality model updates, denoted recency, to enhance generalizability. (b) A client selection strategy for the server based on the local loss of modality model at each client. Experiments on five real-world datasets demonstrate the ability of mmFedMC to achieve comparable accuracy to several baselines while reducing the communication overhead by over 20x. A demo video of our methodology is available at https://liangqiy.com/mmfedmc/.
Stochastic Deep Koopman Model for Quality Propagation Analysis in Multistage Manufacturing Systems
Sep 18, 2023



The modeling of multistage manufacturing systems (MMSs) has attracted increased attention from both academia and industry. Recent advancements in deep learning methods provide an opportunity to accomplish this task with reduced cost and expertise. This study introduces a stochastic deep Koopman (SDK) framework to model the complex behavior of MMSs. Specifically, we present a novel application of Koopman operators to propagate critical quality information extracted by variational autoencoders. Through this framework, we can effectively capture the general nonlinear evolution of product quality using a transferred linear representation, thus enhancing the interpretability of the data-driven model. To evaluate the performance of the SDK framework, we carried out a comparative study on an open-source dataset. The main findings of this paper are as follows. Our results indicate that SDK surpasses other popular data-driven models in accuracy when predicting stagewise product quality within the MMS. Furthermore, the unique linear propagation property in the stochastic latent space of SDK enables traceability for quality evolution throughout the process, thereby facilitating the design of root cause analysis schemes. Notably, the proposed framework requires minimal knowledge of the underlying physics of production lines. It serves as a virtual metrology tool that can be applied to various MMSs, contributing to the ultimate goal of Zero Defect Manufacturing.
Targeted collapse regularized autoencoder for anomaly detection: black hole at the center
Jun 22, 2023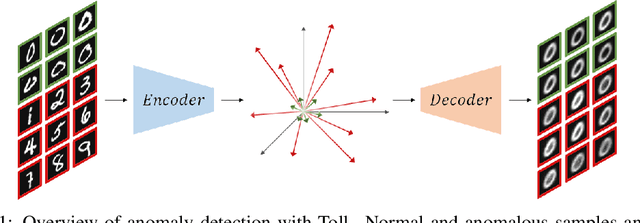
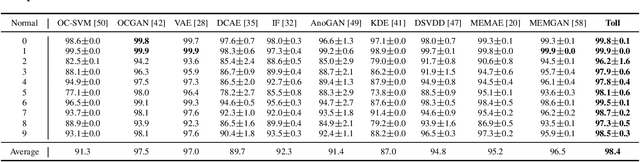
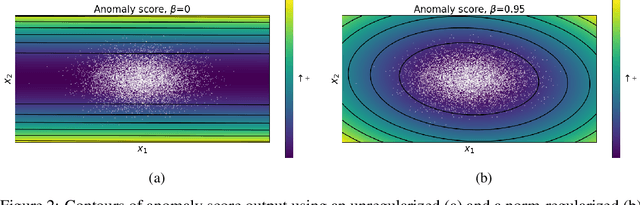
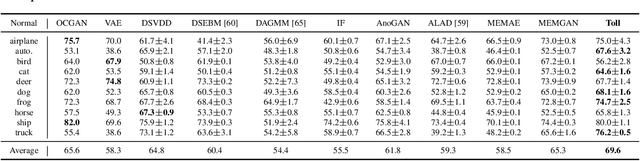
Autoencoders have been extensively used in the development of recent anomaly detection techniques. The premise of their application is based on the notion that after training the autoencoder on normal training data, anomalous inputs will exhibit a significant reconstruction error. Consequently, this enables a clear differentiation between normal and anomalous samples. In practice, however, it is observed that autoencoders can generalize beyond the normal class and achieve a small reconstruction error on some of the anomalous samples. To improve the performance, various techniques propose additional components and more sophisticated training procedures. In this work, we propose a remarkably straightforward alternative: instead of adding neural network components, involved computations, and cumbersome training, we complement the reconstruction loss with a computationally light term that regulates the norm of representations in the latent space. The simplicity of our approach minimizes the requirement for hyperparameter tuning and customization for new applications which, paired with its permissive data modality constraint, enhances the potential for successful adoption across a broad range of applications. We test the method on various visual and tabular benchmarks and demonstrate that the technique matches and frequently outperforms alternatives. We also provide a theoretical analysis and numerical simulations that help demonstrate the underlying process that unfolds during training and how it can help with anomaly detection. This mitigates the black-box nature of autoencoder-based anomaly detection algorithms and offers an avenue for further investigation of advantages, fail cases, and potential new directions.
Robust Multiview Multimodal Driver Monitoring System Using Masked Multi-Head Self-Attention
Apr 13, 2023Driver Monitoring Systems (DMSs) are crucial for safe hand-over actions in Level-2+ self-driving vehicles. State-of-the-art DMSs leverage multiple sensors mounted at different locations to monitor the driver and the vehicle's interior scene and employ decision-level fusion to integrate these heterogenous data. However, this fusion method may not fully utilize the complementarity of different data sources and may overlook their relative importance. To address these limitations, we propose a novel multiview multimodal driver monitoring system based on feature-level fusion through multi-head self-attention (MHSA). We demonstrate its effectiveness by comparing it against four alternative fusion strategies (Sum, Conv, SE, and AFF). We also present a novel GPU-friendly supervised contrastive learning framework SuMoCo to learn better representations. Furthermore, We fine-grained the test split of the DAD dataset to enable the multi-class recognition of drivers' activities. Experiments on this enhanced database demonstrate that 1) the proposed MHSA-based fusion method (AUC-ROC: 97.0\%) outperforms all baselines and previous approaches, and 2) training MHSA with patch masking can improve its robustness against modality/view collapses. The code and annotations are publicly available.
A Novel Two-level Causal Inference Framework for On-road Vehicle Quality Issues Diagnosis
Mar 31, 2023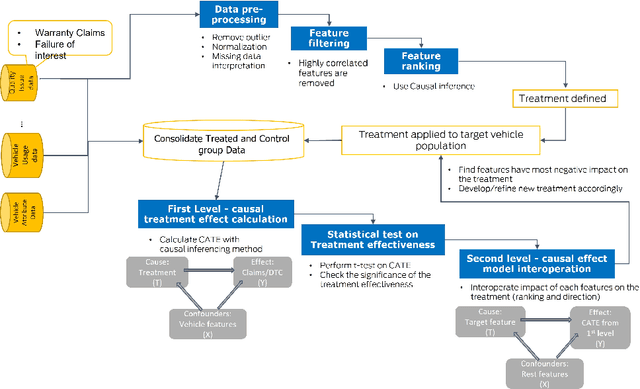

In the automotive industry, the full cycle of managing in-use vehicle quality issues can take weeks to investigate. The process involves isolating root causes, defining and implementing appropriate treatments, and refining treatments if needed. The main pain-point is the lack of a systematic method to identify causal relationships, evaluate treatment effectiveness, and direct the next actionable treatment if the current treatment was deemed ineffective. This paper will show how we leverage causal Machine Learning (ML) to speed up such processes. A real-word data set collected from on-road vehicles will be used to demonstrate the proposed framework. Open challenges for vehicle quality applications will also be discussed.
FIR-based Future Trajectory Prediction in Nighttime Autonomous Driving
Mar 31, 2023The performance of the current collision avoidance systems in Autonomous Vehicles (AV) and Advanced Driver Assistance Systems (ADAS) can be drastically affected by low light and adverse weather conditions. Collisions with large animals such as deer in low light cause significant cost and damage every year. In this paper, we propose the first AI-based method for future trajectory prediction of large animals and mitigating the risk of collision with them in low light. In order to minimize false collision warnings, in our multi-step framework, first, the large animal is accurately detected and a preliminary risk level is predicted for it and low-risk animals are discarded. In the next stage, a multi-stream CONV-LSTM-based encoder-decoder framework is designed to predict the future trajectory of the potentially high-risk animals. The proposed model uses camera motion prediction as well as the local and global context of the scene to generate accurate predictions. Furthermore, this paper introduces a new dataset of FIR videos for large animal detection and risk estimation in real nighttime driving scenarios. Our experiments show promising results of the proposed framework in adverse conditions. Our code is available online.