 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Koopman-based Control of Quality Variation in Multistage Manufacturing Systems
Jul 24, 2024This paper presents a modeling-control synthesis to address the quality control challenges in multistage manufacturing systems (MMSs). A new feedforward control scheme is developed to minimize the quality variations caused by process disturbances in MMSs. Notably, the control framework leverages a stochastic deep Koopman (SDK) model to capture the quality propagation mechanism in the MMSs, highlighted by its ability to transform the nonlinear propagation dynamics into a linear one. Two roll-to-roll case studies are presented to validate the proposed method and demonstrate its effectiveness. The overall method is suitable for nonlinear MMSs and does not require extensive expert knowledge.
Stochastic Deep Koopman Model for Quality Propagation Analysis in Multistage Manufacturing Systems
Sep 18, 2023



The modeling of multistage manufacturing systems (MMSs) has attracted increased attention from both academia and industry. Recent advancements in deep learning methods provide an opportunity to accomplish this task with reduced cost and expertise. This study introduces a stochastic deep Koopman (SDK) framework to model the complex behavior of MMSs. Specifically, we present a novel application of Koopman operators to propagate critical quality information extracted by variational autoencoders. Through this framework, we can effectively capture the general nonlinear evolution of product quality using a transferred linear representation, thus enhancing the interpretability of the data-driven model. To evaluate the performance of the SDK framework, we carried out a comparative study on an open-source dataset. The main findings of this paper are as follows. Our results indicate that SDK surpasses other popular data-driven models in accuracy when predicting stagewise product quality within the MMS. Furthermore, the unique linear propagation property in the stochastic latent space of SDK enables traceability for quality evolution throughout the process, thereby facilitating the design of root cause analysis schemes. Notably, the proposed framework requires minimal knowledge of the underlying physics of production lines. It serves as a virtual metrology tool that can be applied to various MMSs, contributing to the ultimate goal of Zero Defect Manufacturing.
Can Co-robots Learn to Teach?
Nov 22, 2016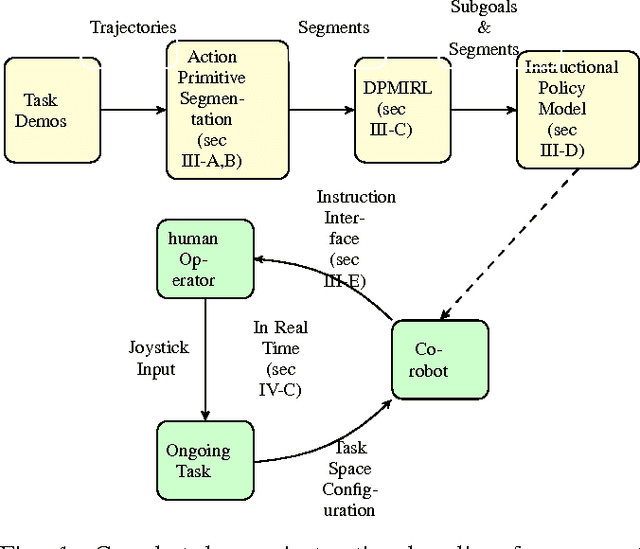
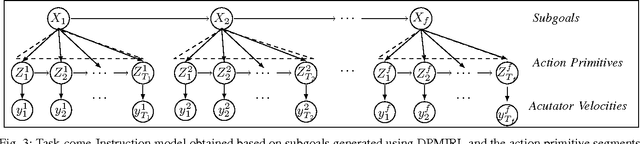
We explore beyond existing work on learning from demonstration by asking the question: Can robots learn to teach?, that is, can a robot autonomously learn an instructional policy from expert demonstration and use it to instruct or collaborate with humans in executing complex tasks in uncertain environments? In this paper we pursue a solution to this problem by leveraging the idea that humans often implicitly decompose a higher level task into several subgoals whose execution brings the task closer to completion. We propose Dirichlet process based non-parametric Inverse Reinforcement Learning (DPMIRL) approach for reward based unsupervised clustering of task space into subgoals. This approach is shown to capture the latent subgoals that a human teacher would have utilized to train a novice. The notion of action primitive is introduced as the means to communicate instruction policy to humans in the least complicated manner, and as a computationally efficient tool to segment demonstration data. We evaluate our approach through experiments on hydraulic actuated scaled model of an excavator and evaluate and compare different teaching strategies utilized by the robot.