 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Koopman-based Control of Quality Variation in Multistage Manufacturing Systems
Jul 24, 2024


This paper presents a modeling-control synthesis to address the quality control challenges in multistage manufacturing systems (MMSs). A new feedforward control scheme is developed to minimize the quality variations caused by process disturbances in MMSs. Notably, the control framework leverages a stochastic deep Koopman (SDK) model to capture the quality propagation mechanism in the MMSs, highlighted by its ability to transform the nonlinear propagation dynamics into a linear one. Two roll-to-roll case studies are presented to validate the proposed method and demonstrate its effectiveness. The overall method is suitable for nonlinear MMSs and does not require extensive expert knowledge.
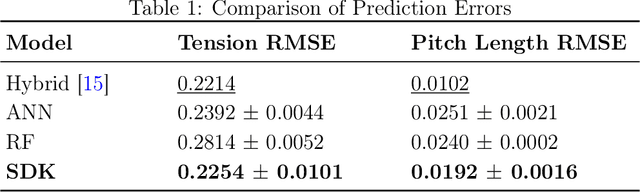
Stochastic Deep Koopman Model for Quality Propagation Analysis in Multistage Manufacturing Systems
Sep 18, 2023



The modeling of multistage manufacturing systems (MMSs) has attracted increased attention from both academia and industry. Recent advancements in deep learning methods provide an opportunity to accomplish this task with reduced cost and expertise. This study introduces a stochastic deep Koopman (SDK) framework to model the complex behavior of MMSs. Specifically, we present a novel application of Koopman operators to propagate critical quality information extracted by variational autoencoders. Through this framework, we can effectively capture the general nonlinear evolution of product quality using a transferred linear representation, thus enhancing the interpretability of the data-driven model. To evaluate the performance of the SDK framework, we carried out a comparative study on an open-source dataset. The main findings of this paper are as follows. Our results indicate that SDK surpasses other popular data-driven models in accuracy when predicting stagewise product quality within the MMS. Furthermore, the unique linear propagation property in the stochastic latent space of SDK enables traceability for quality evolution throughout the process, thereby facilitating the design of root cause analysis schemes. Notably, the proposed framework requires minimal knowledge of the underlying physics of production lines. It serves as a virtual metrology tool that can be applied to various MMSs, contributing to the ultimate goal of Zero Defect Manufacturing.
Shapley-based Explainable AI for Clustering Applications in Fault Diagnosis and Prognosis
Mar 25, 2023Data-driven artificial intelligence models require explainability in intelligent manufacturing to streamline adoption and trust in modern industry. However, recently developed explainable artificial intelligence (XAI) techniques that estimate feature contributions on a model-agnostic level such as SHapley Additive exPlanations (SHAP) have not yet been evaluated for semi-supervised fault diagnosis and prognosis problems characterized by class imbalance and weakly labeled datasets. This paper explores the potential of utilizing Shapley values for a new clustering framework compatible with semi-supervised learning problems, loosening the strict supervision requirement of current XAI techniques. This broad methodology is validated on two case studies: a heatmap image dataset obtained from a semiconductor manufacturing process featuring class imbalance, and a benchmark dataset utilized in the 2021 Prognostics and Health Management (PHM) Data Challenge. Semi-supervised clustering based on Shapley values significantly improves upon clustering quality compared to the fully unsupervised case, deriving information-dense and meaningful clusters that relate to underlying fault diagnosis model predictions. These clusters can also be characterized by high-precision decision rules in terms of original feature values, as demonstrated in the second case study. The rules, limited to 1-2 terms utilizing original feature scales, describe 12 out of the 16 derived equipment failure clusters with precision exceeding 0.85, showcasing the promising utility of the explainable clustering framework for intelligent manufacturing applications.
Fault Prognosis of Turbofan Engines: Eventual Failure Prediction and Remaining Useful Life Estimation
Mar 23, 2023



In the era of industrial big data, prognostics and health management is essential to improve the prediction of future failures to minimize inventory, maintenance, and human costs. Used for the 2021 PHM Data Challenge, the new Commercial Modular Aero-Propulsion System Simulation dataset from NASA is an open-source benchmark containing simulated turbofan engine units flown under realistic flight conditions. Deep learning approaches implemented previously for this application attempt to predict the remaining useful life of the engine units, but have not utilized labeled failure mode information, impeding practical usage and explainability. To address these limitations, a new prognostics approach is formulated with a customized loss function to simultaneously predict the current health state, the eventual failing component(s), and the remaining useful life. The proposed method incorporates principal component analysis to orthogonalize statistical time-domain features, which are inputs into supervised regressors such as random forests, extreme random forests, XGBoost, and artificial neural networks. The highest performing algorithm, ANN-Flux, achieves AUROC and AUPR scores exceeding 0.95 for each classification. In addition, ANN-Flux reduces the remaining useful life RMSE by 38% for the same test split of the dataset compared to past work, with significantly less computational cost.
Autonomous Formula Racecar: Overall System Design and Experimental Validation
Sep 01, 2020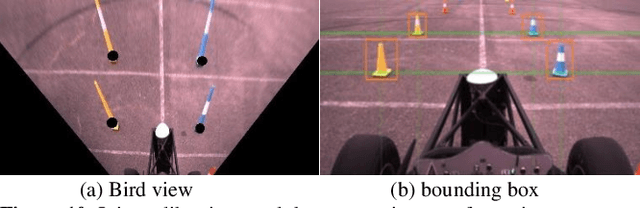


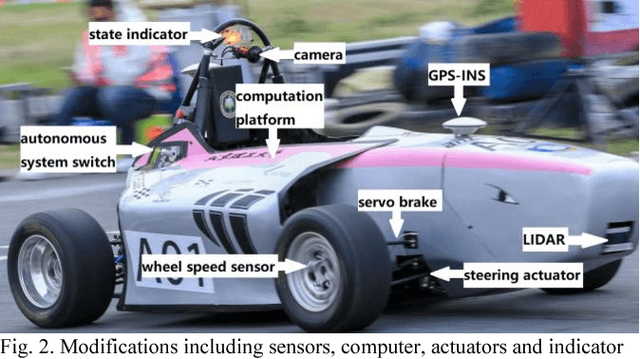
This paper develops and summarizes the work of building the autonomous integrated system including perception system and vehicle dynamic controller for a formula student autonomous racecar. We propose a system framework combining X-by-wired modification, perception & motion planning and vehicle dynamic control as a template of FSAC racecar which can be easily replicated. A LIDAR-vision cooperating method of detecting traffic cone which is used as track mark is proposed. Detection algorithm of the racecar also implements a precise and high rate localization method which combines the GPS-INS data and LIDAR odometry. Besides, a track map including the location and color information of the cones is built simultaneously. Finally, the system and vehicle performance on a closed loop track is tested. This paper also briefly introduces the Formula Student Autonomous Competition (FSAC).
Learning based Predictive Error Estimation and Compensator Design for Autonomous Vehicle Path Tracking
Jul 18, 2020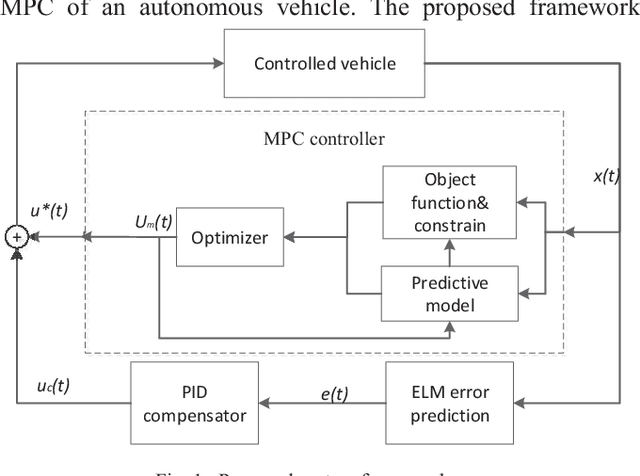
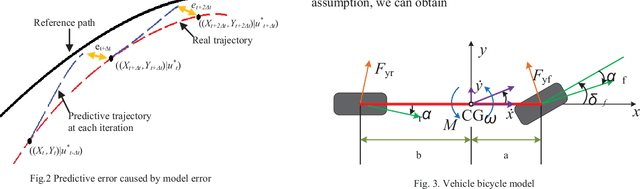
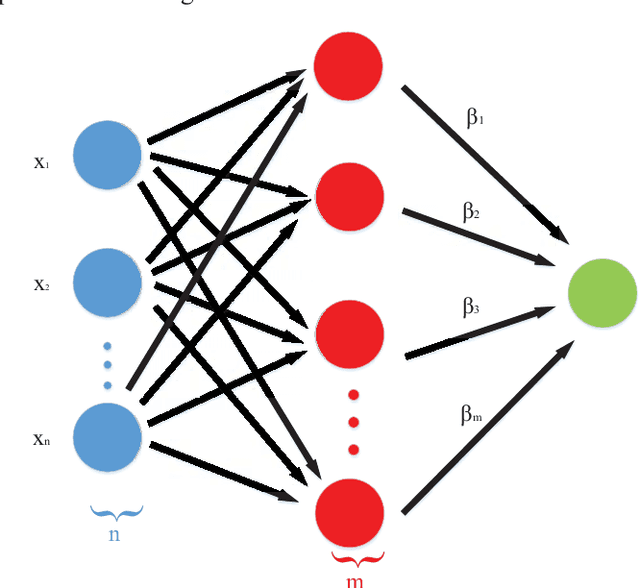
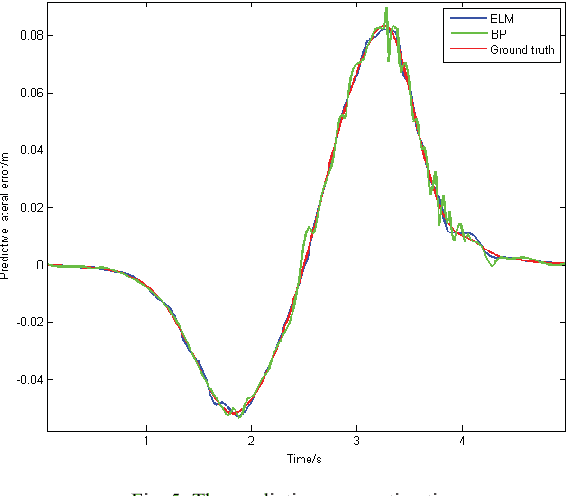
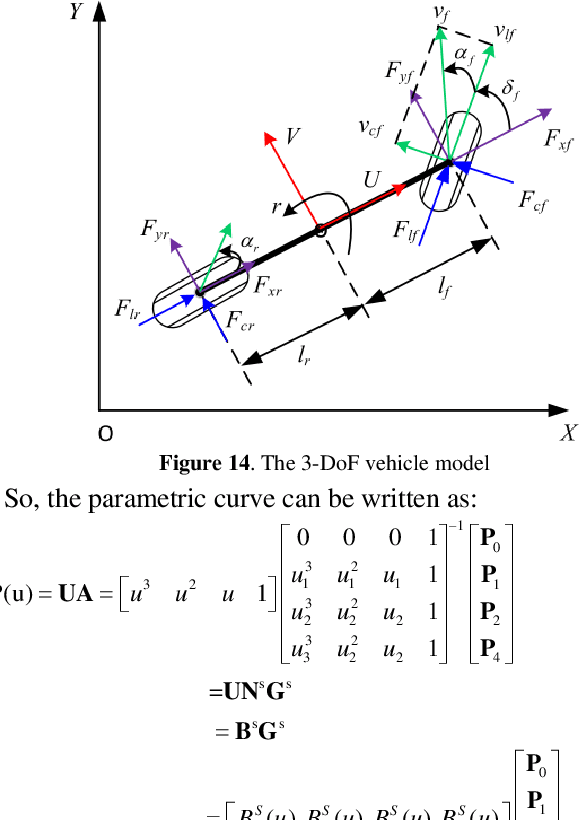
Model predictive control (MPC) is widely used for path tracking of autonomous vehicles due to its ability to handle various types of constraints. However, a considerable predictive error exists because of the error of mathematics model or the model linearization. In this paper, we propose a framework combining the MPC with a learning-based error estimator and a feedforward compensator to improve the path tracking accuracy. An extreme learning machine is implemented to estimate the model based predictive error from vehicle state feedback information. Offline training data is collected from a vehicle controlled by a model-defective regular MPC for path tracking in several working conditions, respectively. The data include vehicle state and the spatial error between the current actual position and the corresponding predictive position. According to the estimated predictive error, we then design a PID-based feedforward compensator. Simulation results via Carsim show the estimation accuracy of the predictive error and the effectiveness of the proposed framework for path tracking of an autonomous vehicle.
Integrating global spatial features in CNN based Hyperspectral/SAR imagery classification
Jun 15, 2020The land cover classification has played an important role in remote sensing because it can intelligently identify things in one huge remote sensing image to reduce the work of humans. However, a lot of classification methods are designed based on the pixel feature or limited spatial feature of the remote sensing image, which limits the classification accuracy and universality of their methods. This paper proposed a novel method to take into the information of remote sensing image, i.e., geographic latitude-longitude information. In addition, a dual-branch convolutional neural network (CNN) classification method is designed in combination with the global information to mine the pixel features of the image. Then, the features of the two neural networks are fused with another fully neural network to realize the classification of remote sensing images. Finally, two remote sensing images are used to verify the effectiveness of our method, including hyperspectral imaging (HSI) and polarimetric synthetic aperture radar (PolSAR) imagery. The result of the proposed method is superior to the traditional single-channel convolutional neural network.
Autonomous Driving System Design for Formula Student Driverless Racecar
Sep 19, 2018
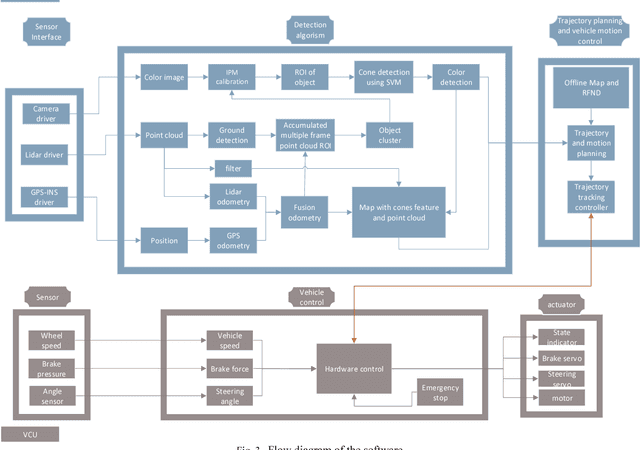
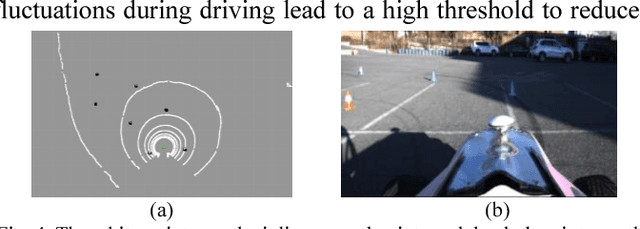
This paper summarizes the work of building the autonomous system including detection system and path tracking controller for a formula student autonomous racecar. A LIDAR-vision cooperating method of detecting traffic cone which is used as track mark is proposed. Detection algorithm of the racecar also implements a precise and high rate localization method which combines the GPS-INS data and LIDAR odometry. Besides, a track map including the location and color information of the cones is built simultaneously. Finally, the system and vehicle performance on a closed loop track is tested. This paper also briefly introduces the Formula Student Autonomous Competition (FSAC) in 2017.