Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomous Driving System Design for Formula Student Driverless Racecar
Paper and Code
Sep 19, 2018
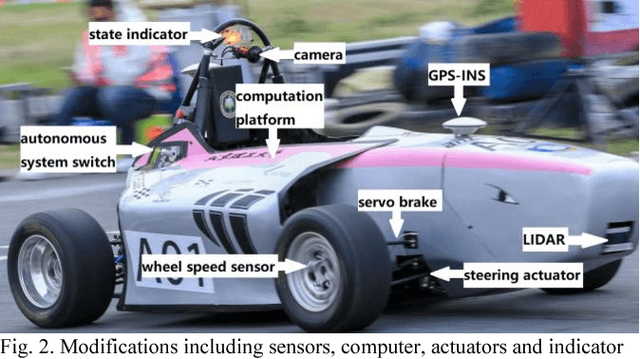
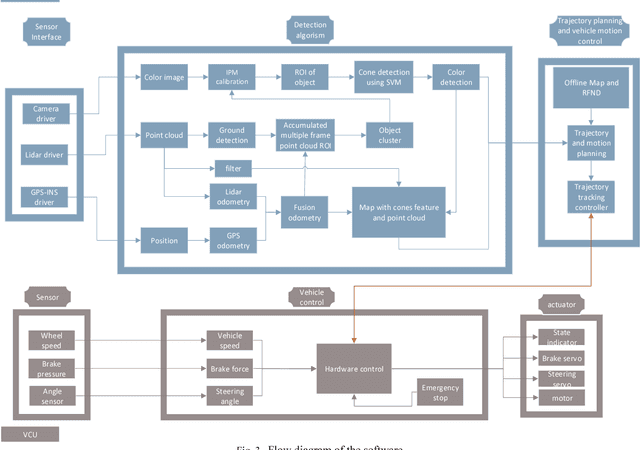
This paper summarizes the work of building the autonomous system including detection system and path tracking controller for a formula student autonomous racecar. A LIDAR-vision cooperating method of detecting traffic cone which is used as track mark is proposed. Detection algorithm of the racecar also implements a precise and high rate localization method which combines the GPS-INS data and LIDAR odometry. Besides, a track map including the location and color information of the cones is built simultaneously. Finally, the system and vehicle performance on a closed loop track is tested. This paper also briefly introduces the Formula Student Autonomous Competition (FSAC) in 2017.
* The 2018 IEEE Intelligent Vehicles Symposium
View paper on