 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomous Formula Racecar: Overall System Design and Experimental Validation
Sep 01, 2020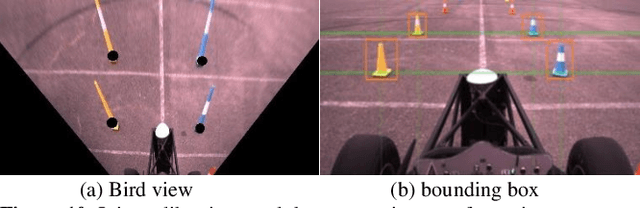


This paper develops and summarizes the work of building the autonomous integrated system including perception system and vehicle dynamic controller for a formula student autonomous racecar. We propose a system framework combining X-by-wired modification, perception & motion planning and vehicle dynamic control as a template of FSAC racecar which can be easily replicated. A LIDAR-vision cooperating method of detecting traffic cone which is used as track mark is proposed. Detection algorithm of the racecar also implements a precise and high rate localization method which combines the GPS-INS data and LIDAR odometry. Besides, a track map including the location and color information of the cones is built simultaneously. Finally, the system and vehicle performance on a closed loop track is tested. This paper also briefly introduces the Formula Student Autonomous Competition (FSAC).
Learning based Predictive Error Estimation and Compensator Design for Autonomous Vehicle Path Tracking
Jul 18, 2020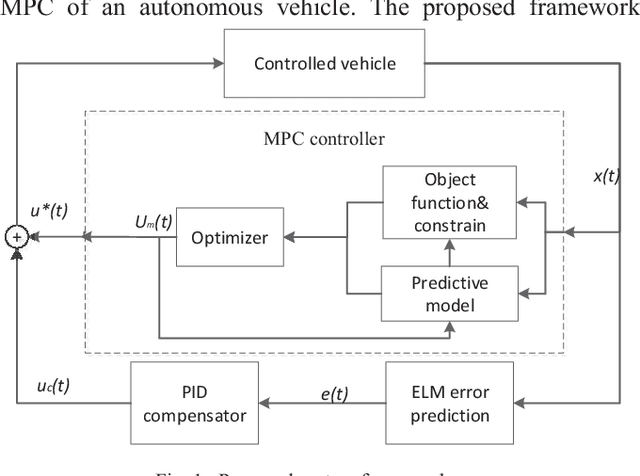
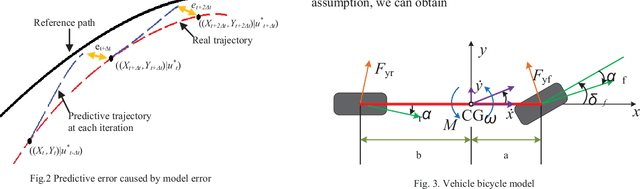
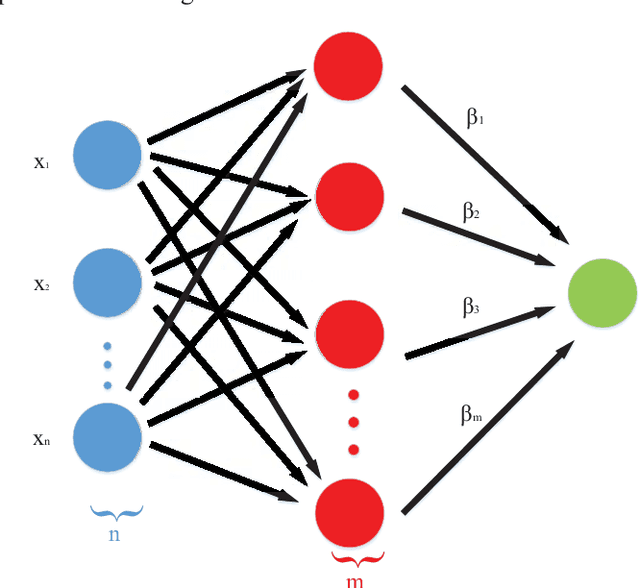
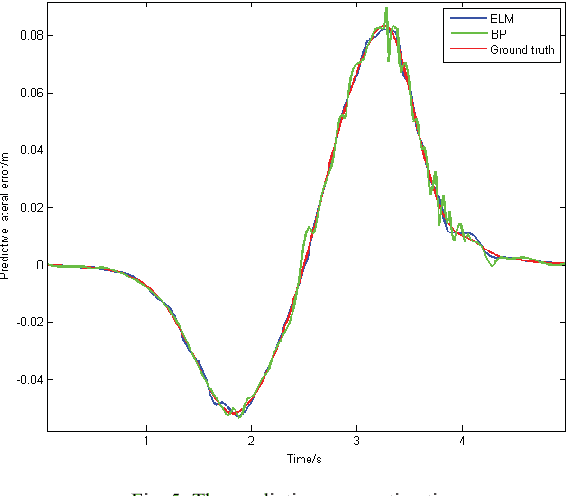
Model predictive control (MPC) is widely used for path tracking of autonomous vehicles due to its ability to handle various types of constraints. However, a considerable predictive error exists because of the error of mathematics model or the model linearization. In this paper, we propose a framework combining the MPC with a learning-based error estimator and a feedforward compensator to improve the path tracking accuracy. An extreme learning machine is implemented to estimate the model based predictive error from vehicle state feedback information. Offline training data is collected from a vehicle controlled by a model-defective regular MPC for path tracking in several working conditions, respectively. The data include vehicle state and the spatial error between the current actual position and the corresponding predictive position. According to the estimated predictive error, we then design a PID-based feedforward compensator. Simulation results via Carsim show the estimation accuracy of the predictive error and the effectiveness of the proposed framework for path tracking of an autonomous vehicle.
Autonomous Driving System Design for Formula Student Driverless Racecar
Sep 19, 2018
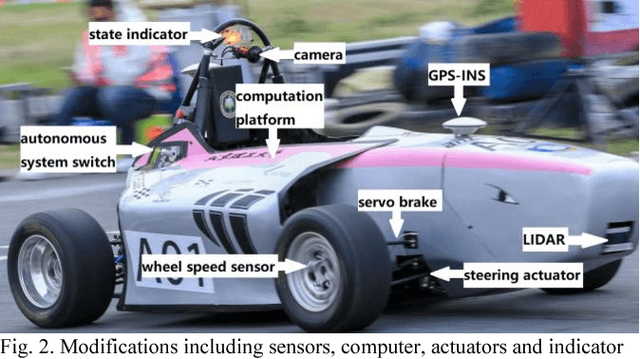
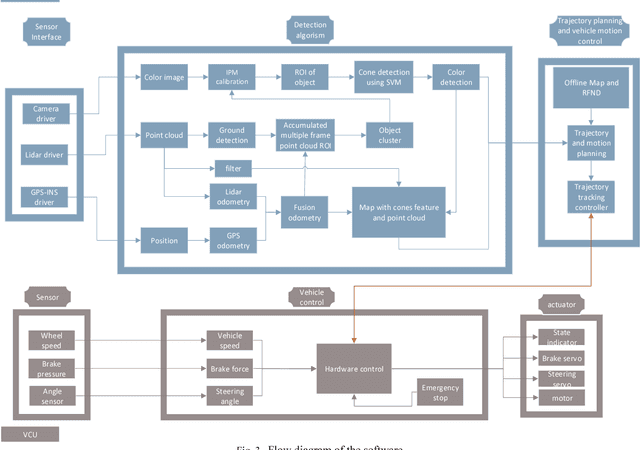
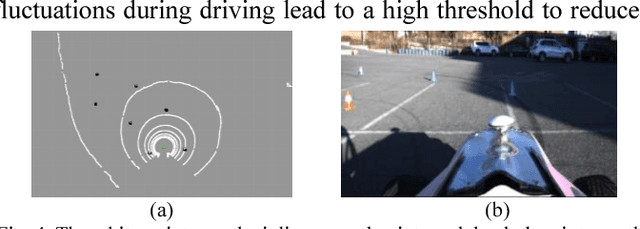
This paper summarizes the work of building the autonomous system including detection system and path tracking controller for a formula student autonomous racecar. A LIDAR-vision cooperating method of detecting traffic cone which is used as track mark is proposed. Detection algorithm of the racecar also implements a precise and high rate localization method which combines the GPS-INS data and LIDAR odometry. Besides, a track map including the location and color information of the cones is built simultaneously. Finally, the system and vehicle performance on a closed loop track is tested. This paper also briefly introduces the Formula Student Autonomous Competition (FSAC) in 2017.