 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCan Co-robots Learn to Teach?
Paper and Code
Nov 22, 2016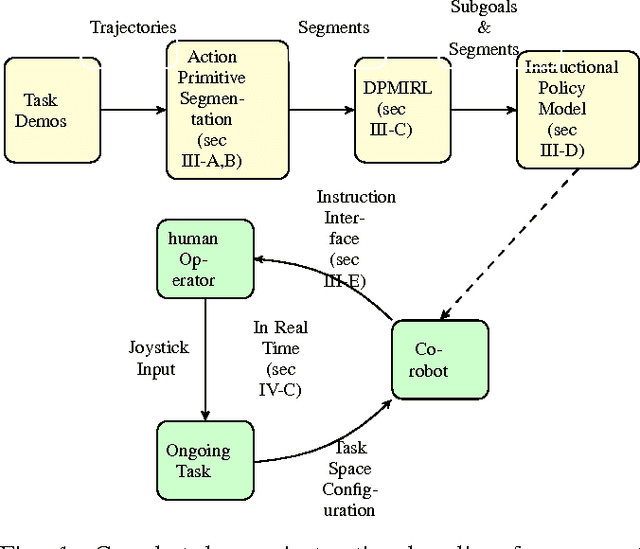
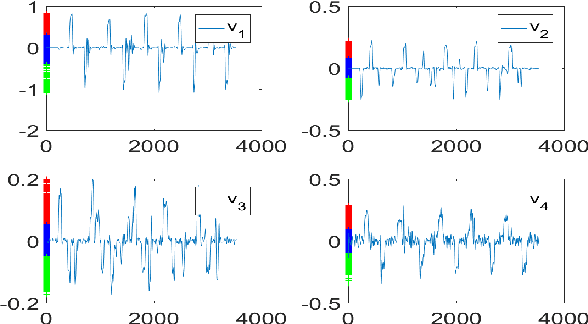
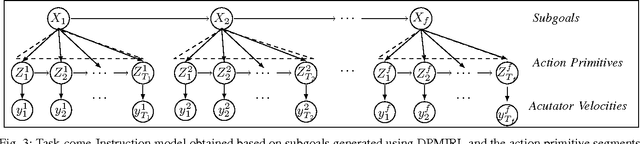
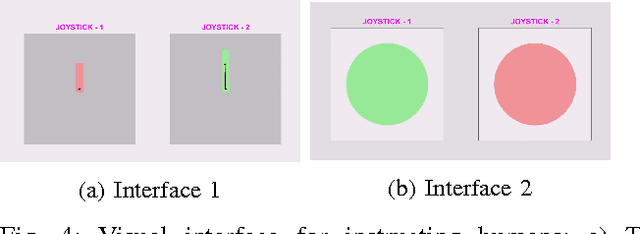
We explore beyond existing work on learning from demonstration by asking the question: Can robots learn to teach?, that is, can a robot autonomously learn an instructional policy from expert demonstration and use it to instruct or collaborate with humans in executing complex tasks in uncertain environments? In this paper we pursue a solution to this problem by leveraging the idea that humans often implicitly decompose a higher level task into several subgoals whose execution brings the task closer to completion. We propose Dirichlet process based non-parametric Inverse Reinforcement Learning (DPMIRL) approach for reward based unsupervised clustering of task space into subgoals. This approach is shown to capture the latent subgoals that a human teacher would have utilized to train a novice. The notion of action primitive is introduced as the means to communicate instruction policy to humans in the least complicated manner, and as a computationally efficient tool to segment demonstration data. We evaluate our approach through experiments on hydraulic actuated scaled model of an excavator and evaluate and compare different teaching strategies utilized by the robot.