 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInfrared Vision Systems for Emergency Vehicle Driver Assistance in Low-Visibility Conditions
Apr 18, 2025



This study investigates the potential of infrared (IR) camera technology to enhance driver safety for emergency vehicles operating in low-visibility conditions, particularly at night and in dense fog. Such environments significantly increase the risk of collisions, especially for tow trucks and snowplows that must remain operational in challenging conditions. Conventional driver assistance systems often struggle under these conditions due to limited visibility. In contrast, IR cameras, which detect the thermal signatures of obstacles, offer a promising alternative. The evaluation combines controlled laboratory experiments, real-world field tests, and surveys of emergency vehicle operators. In addition to assessing detection performance, the study examines the feasibility of retrofitting existing Department of Transportation (DoT) fleets with cost-effective IR-based driver assistance systems. Results underscore the utility of IR technology in enhancing driver awareness and provide data-driven recommendations for scalable deployment across legacy emergency vehicle fleets.
Efficient Motion Planning for Manipulators with Control Barrier Function-Induced Neural Controller
Apr 01, 2024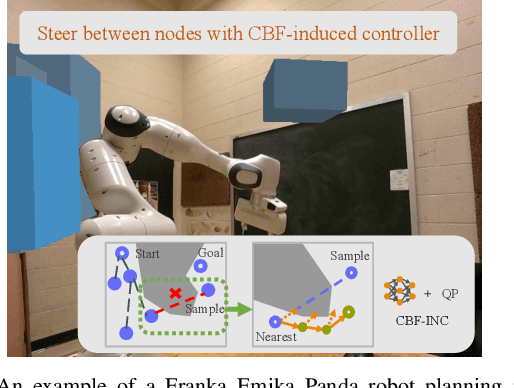
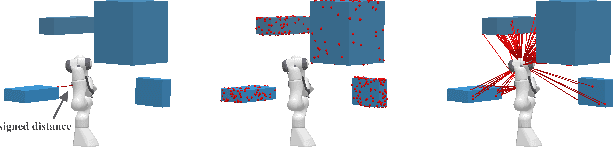
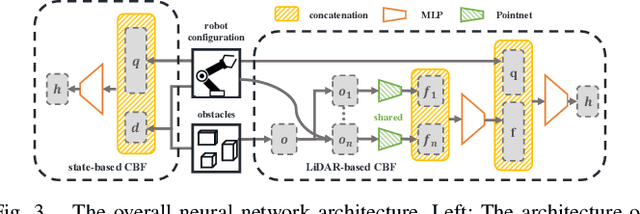
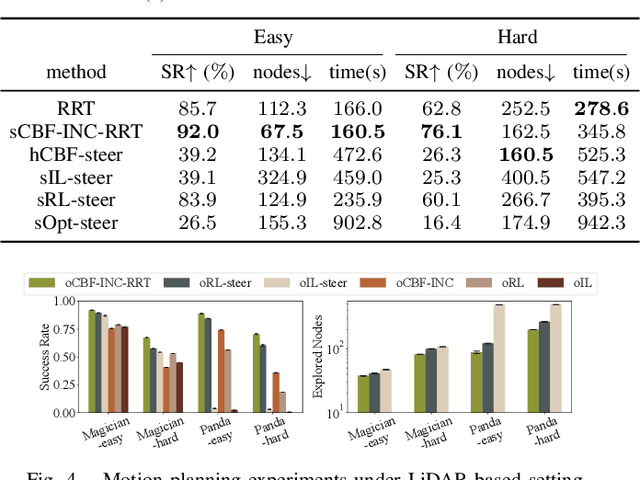
Sampling-based motion planning methods for manipulators in crowded environments often suffer from expensive collision checking and high sampling complexity, which make them difficult to use in real time. To address this issue, we propose a new generalizable control barrier function (CBF)-based steering controller to reduce the number of samples needed in a sampling-based motion planner RRT. Our method combines the strength of CBF for real-time collision-avoidance control and RRT for long-horizon motion planning, by using CBF-induced neural controller (CBF-INC) to generate control signals that steer the system towards sampled configurations by RRT. CBF-INC is learned as Neural Networks and has two variants handling different inputs, respectively: state (signed distance) input and point-cloud input from LiDAR. In the latter case, we also study two different settings: fully and partially observed environmental information. Compared to manually crafted CBF which suffers from over-approximating robot geometry, CBF-INC can balance safety and goal-reaching better without being over-conservative. Given state-based input, our neural CBF-induced neural controller-enhanced RRT (CBF-INC-RRT) can increase the success rate by 14% while reducing the number of nodes explored by 30%, compared with vanilla RRT on hard test cases. Given LiDAR input where vanilla RRT is not directly applicable, we demonstrate that our CBF-INC-RRT can improve the success rate by 10%, compared with planning with other steering controllers. Our project page with supplementary material is at https://mit-realm.github.io/CBF-INC-RRT-website/.
An Efficient and Scalable Deep Learning Approach for Road Damage Detection
Dec 17, 2020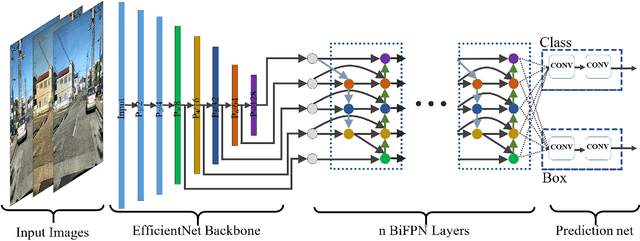
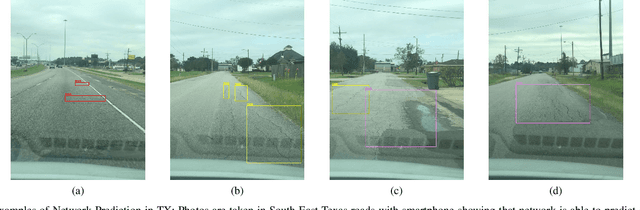
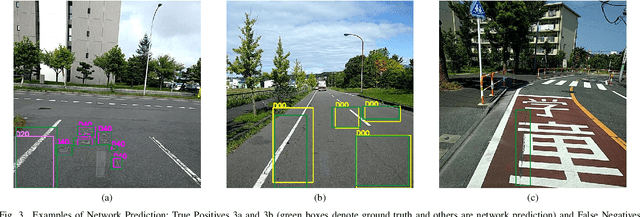
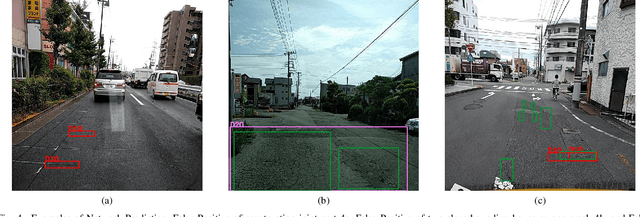
Pavement condition evaluation is essential to time the preventative or rehabilitative actions and control distress propagation. Failing to conduct timely evaluations can lead to severe structural and financial loss of the infrastructure and complete reconstructions. Automated computer-aided surveying measures can provide a database of road damage patterns and their locations. This database can be utilized for timely road repairs to gain the minimum cost of maintenance and the asphalt's maximum durability. This paper introduces a deep learning-based surveying scheme to analyze the image-based distress data in real-time. A database consisting of a diverse population of crack distress types such as longitudinal, transverse, and alligator cracks, photographed using mobile-device is used. Then, a family of efficient and scalable models that are tuned for pavement crack detection is trained, and various augmentation policies are explored. Proposed models, resulted in F1-scores, ranging from 52% to 56%, and average inference time from 178-10 images per second. Finally, the performance of the object detectors are examined, and error analysis is reported against various images. The source code is available at https://github.com/mahdi65/roadDamageDetection2020.
Design, Modeling, and Control of Norma: a Slider & Pendulum-Driven Spherical Robot
Aug 06, 2019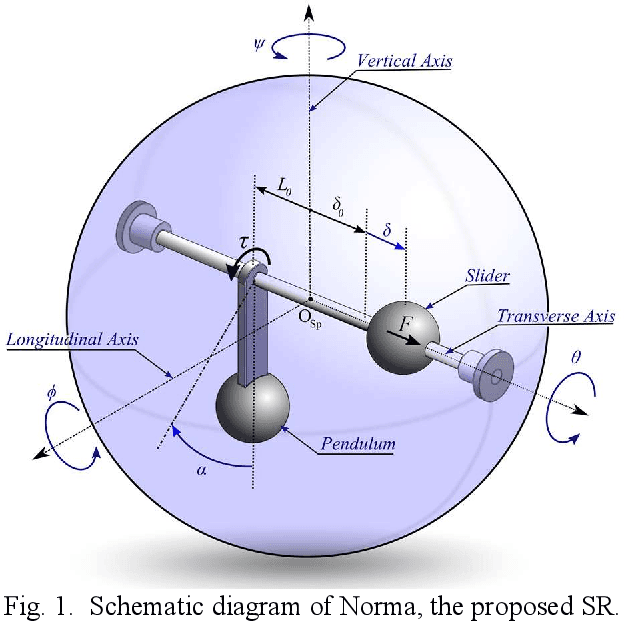


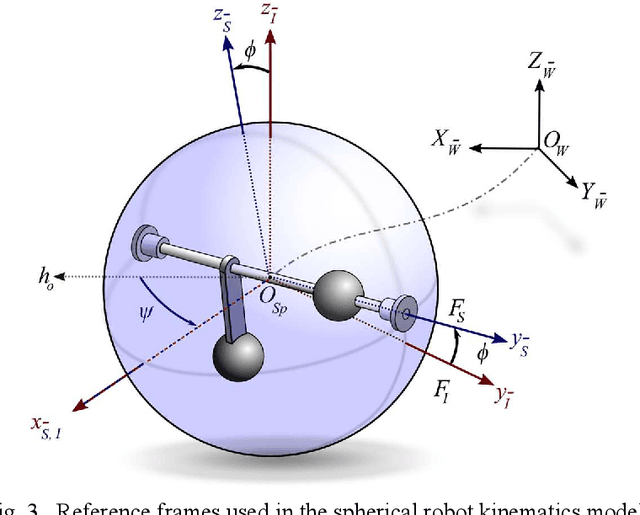
This paper discusses the design, modeling, and control of Norma, a novel 2 DOF mobile spherical robot (SR). The propelling mechanism of this robot consists of two actuators: a slider, and a rotational pendulum located on the SR's diagonal shaft. The slider can translate along the shaft and shift the robot's center of gravity towards the robot's sides. The pendulum rotates around the shaft to propel the SR to roll forward and backward. These two actuators enable the SR to perform both rolling and turning maneuvers as a nonholonomic robot. The advantage of the proposed mechanical design lies in its convenience of physical implementation, agility, and accurate mathematical model. The Euler Lagrange approach is utilized to derive the dynamics of the proposed mechanical structure using minimum simplifications possible. Further, a path tracking control scheme is introduced for a smooth trajectory. Finally, simulations are carried out in MATLAB to verify the accuracy of the mathematical model and the effectiveness of the controller against experimental results.