 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient Motion Planning for Manipulators with Control Barrier Function-Induced Neural Controller
Paper and Code
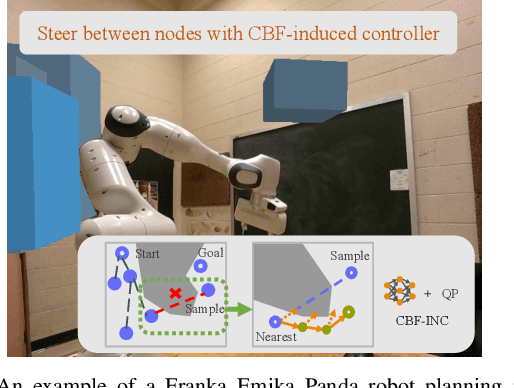
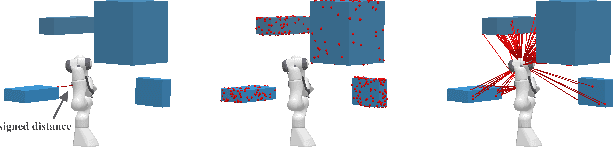
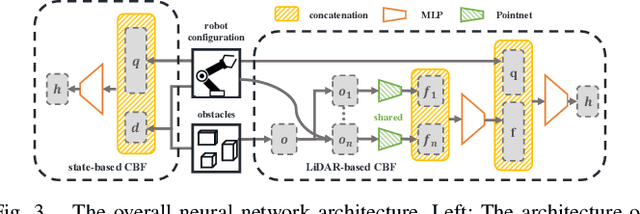
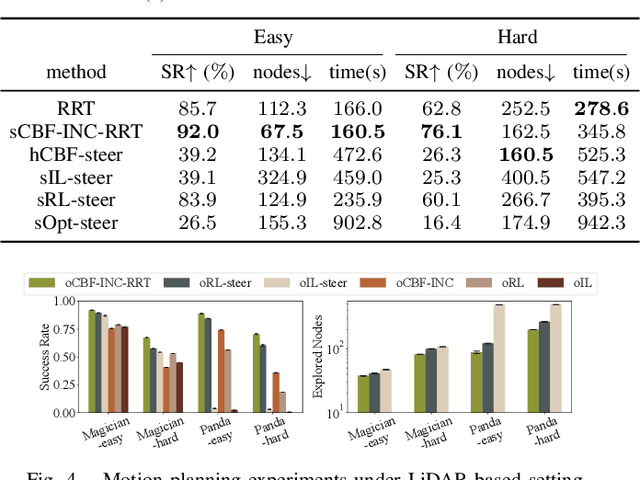
Sampling-based motion planning methods for manipulators in crowded environments often suffer from expensive collision checking and high sampling complexity, which make them difficult to use in real time. To address this issue, we propose a new generalizable control barrier function (CBF)-based steering controller to reduce the number of samples needed in a sampling-based motion planner RRT. Our method combines the strength of CBF for real-time collision-avoidance control and RRT for long-horizon motion planning, by using CBF-induced neural controller (CBF-INC) to generate control signals that steer the system towards sampled configurations by RRT. CBF-INC is learned as Neural Networks and has two variants handling different inputs, respectively: state (signed distance) input and point-cloud input from LiDAR. In the latter case, we also study two different settings: fully and partially observed environmental information. Compared to manually crafted CBF which suffers from over-approximating robot geometry, CBF-INC can balance safety and goal-reaching better without being over-conservative. Given state-based input, our neural CBF-induced neural controller-enhanced RRT (CBF-INC-RRT) can increase the success rate by 14% while reducing the number of nodes explored by 30%, compared with vanilla RRT on hard test cases. Given LiDAR input where vanilla RRT is not directly applicable, we demonstrate that our CBF-INC-RRT can improve the success rate by 10%, compared with planning with other steering controllers. Our project page with supplementary material is at https://mit-realm.github.io/CBF-INC-RRT-website/.