 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTruveta Mapper: A Zero-shot Ontology Alignment Framework
Jan 24, 2023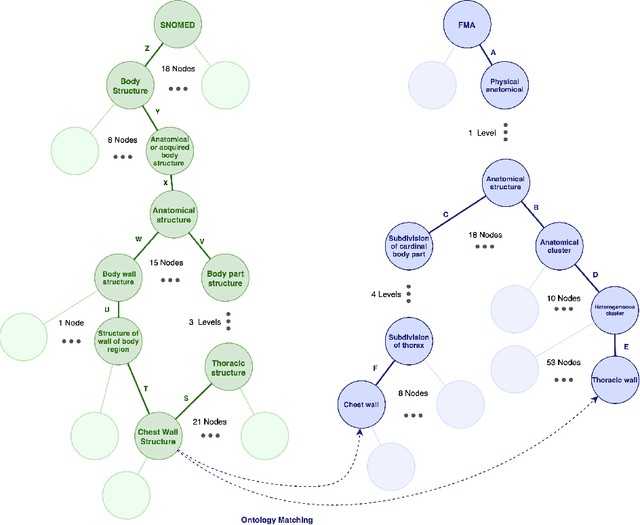
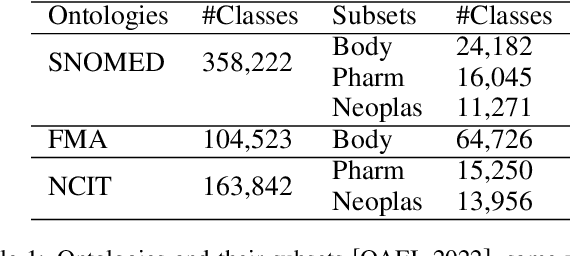
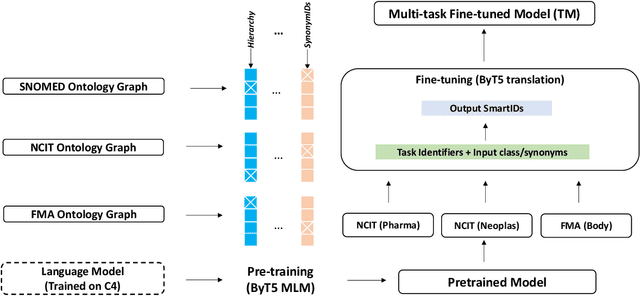
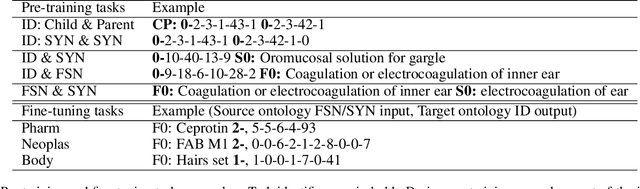
In this paper, a new perspective is suggested for unsupervised Ontology Matching (OM) or Ontology Alignment (OA) by treating it as a translation task. Ontologies are represented as graphs, and the translation is performed from a node in the source ontology graph to a path in the target ontology graph. The proposed framework, Truveta Mapper (TM), leverages a multi-task sequence-to-sequence transformer model to perform alignment across multiple ontologies in a zero-shot, unified and end-to-end manner. Multi-tasking enables the model to implicitly learn the relationship between different ontologies via transfer-learning without requiring any explicit cross-ontology manually labeled data. This also enables the formulated framework to outperform existing solutions for both runtime latency and alignment quality. The model is pre-trained and fine-tuned only on publicly available text corpus and inner-ontologies data. The proposed solution outperforms state-of-the-art approaches, Edit-Similarity, LogMap, AML, BERTMap, and the recently presented new OM frameworks in Ontology Alignment Evaluation Initiative (OAEI22), offers log-linear complexity in contrast to quadratic in the existing end-to-end methods, and overall makes the OM task efficient and more straightforward without much post-processing involving mapping extension or mapping repair.
An Efficient and Scalable Deep Learning Approach for Road Damage Detection
Dec 17, 2020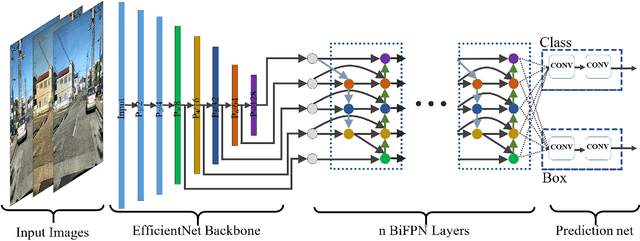
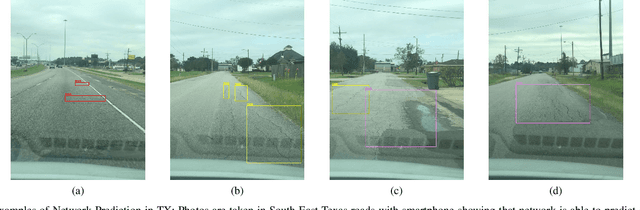
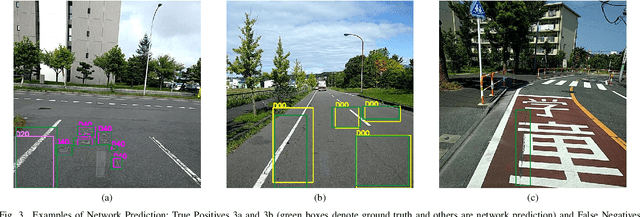
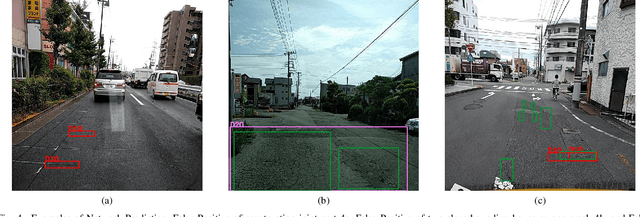
Pavement condition evaluation is essential to time the preventative or rehabilitative actions and control distress propagation. Failing to conduct timely evaluations can lead to severe structural and financial loss of the infrastructure and complete reconstructions. Automated computer-aided surveying measures can provide a database of road damage patterns and their locations. This database can be utilized for timely road repairs to gain the minimum cost of maintenance and the asphalt's maximum durability. This paper introduces a deep learning-based surveying scheme to analyze the image-based distress data in real-time. A database consisting of a diverse population of crack distress types such as longitudinal, transverse, and alligator cracks, photographed using mobile-device is used. Then, a family of efficient and scalable models that are tuned for pavement crack detection is trained, and various augmentation policies are explored. Proposed models, resulted in F1-scores, ranging from 52% to 56%, and average inference time from 178-10 images per second. Finally, the performance of the object detectors are examined, and error analysis is reported against various images. The source code is available at https://github.com/mahdi65/roadDamageDetection2020.