 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeC3D: Cascade Control with Change Point Detection and Deep Koopman Learning for Autonomous Surface Vehicles
Mar 14, 2024In this paper, we discuss the development and deployment of a robust autonomous system capable of performing various tasks in the maritime domain under unknown dynamic conditions. We investigate a data-driven approach based on modular design for ease of transfer of autonomy across different maritime surface vessel platforms. The data-driven approach alleviates issues related to a priori identification of system models that may become deficient under evolving system behaviors or shifting, unanticipated, environmental influences. Our proposed learning-based platform comprises a deep Koopman system model and a change point detector that provides guidance on domain shifts prompting relearning under severe exogenous and endogenous perturbations. Motion control of the autonomous system is achieved via an optimal controller design. The Koopman linearized model naturally lends itself to a linear-quadratic regulator (LQR) control design. We propose the C3D control architecture Cascade Control with Change Point Detection and Deep Koopman Learning. The framework is verified in station keeping task on an ASV in both simulation and real experiments. The approach achieved at least 13.9 percent improvement in mean distance error in all test cases compared to the methods that do not consider system changes.
An Efficient Detection and Control System for Underwater Docking using Machine Learning and Realistic Simulation: A Comprehensive Approach
Nov 06, 2023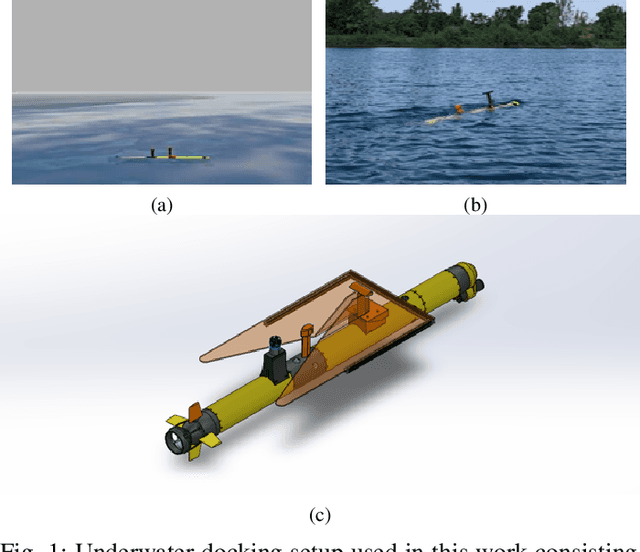
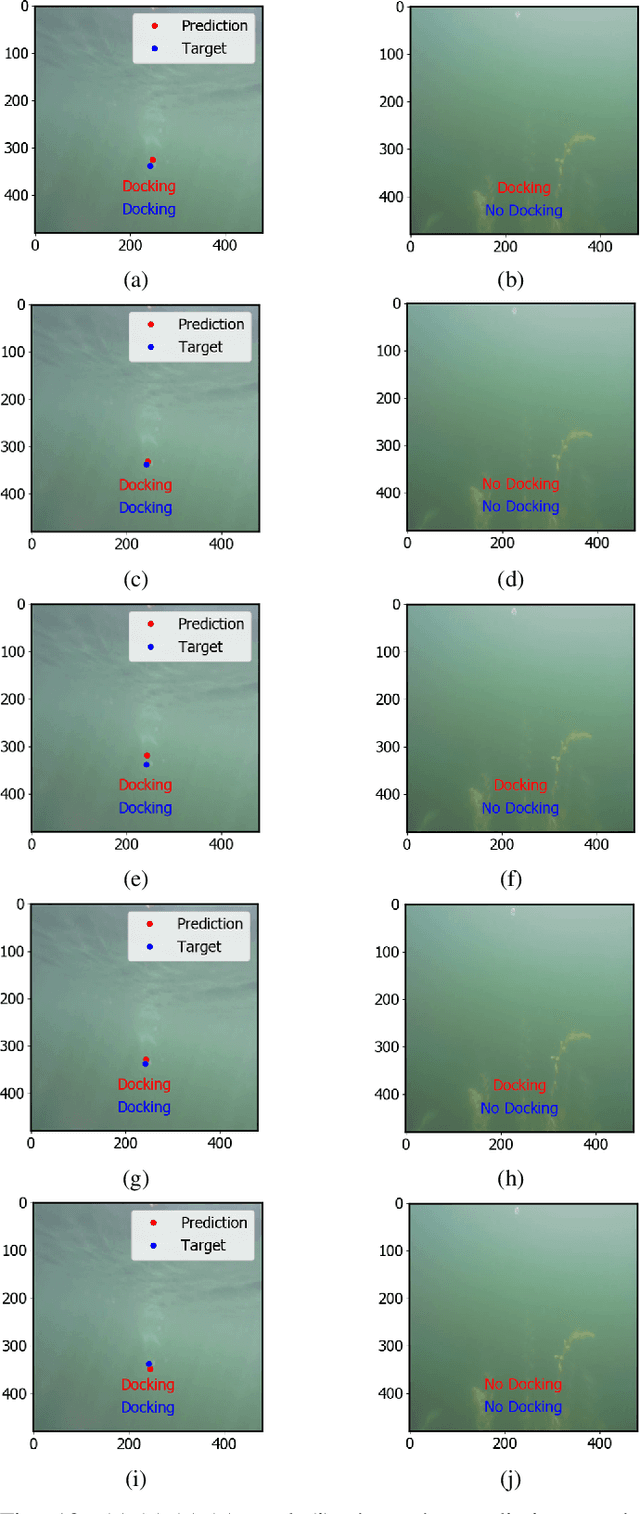
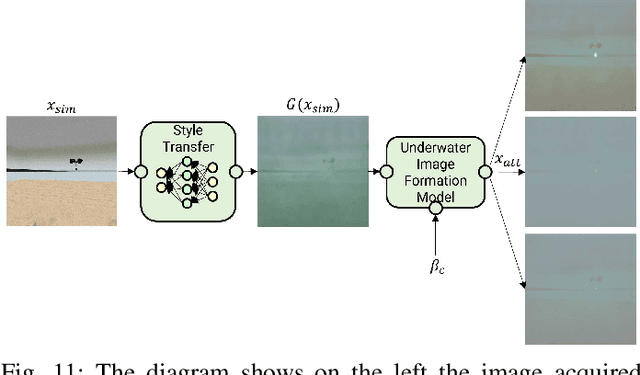
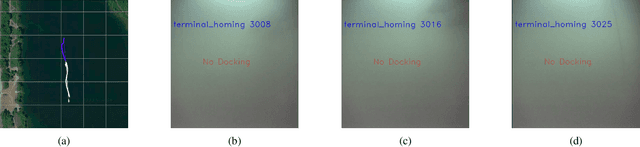
Underwater docking is critical to enable the persistent operation of Autonomous Underwater Vehicles (AUVs). For this, the AUV must be capable of detecting and localizing the docking station, which is complex due to the highly dynamic undersea environment. Image-based solutions offer a high acquisition rate and versatile alternative to adapt to this environment; however, the underwater environment presents challenges such as low visibility, high turbidity, and distortion. In addition to this, field experiments to validate underwater docking capabilities can be costly and dangerous due to the specialized equipment and safety considerations required to conduct the experiments. This work compares different deep-learning architectures to perform underwater docking detection and classification. The architecture with the best performance is then compressed using knowledge distillation under the teacher-student paradigm to reduce the network's memory footprint, allowing real-time implementation. To reduce the simulation-to-reality gap, a Generative Adversarial Network (GAN) is used to do image-to-image translation, converting the Gazebo simulation image into a realistic underwater-looking image. The obtained image is then processed using an underwater image formation model to simulate image attenuation over distance under different water types. The proposed method is finally evaluated according to the AUV docking success rate and compared with classical vision methods. The simulation results show an improvement of 20% in the high turbidity scenarios regardless of the underwater currents. Furthermore, we show the performance of the proposed approach by showing experimental results on the off-the-shelf AUV Iver3.
ASV Station Keeping under Wind Disturbances using Neural Network Simulation Error Minimization Model Predictive Control
Oct 11, 2023Station keeping is an essential maneuver for Autonomous Surface Vehicles (ASVs), mainly when used in confined spaces, to carry out surveys that require the ASV to keep its position or in collaboration with other vehicles where the relative position has an impact over the mission. However, this maneuver can become challenging for classic feedback controllers due to the need for an accurate model of the ASV dynamics and the environmental disturbances. This work proposes a Model Predictive Controller using Neural Network Simulation Error Minimization (NNSEM-MPC) to accurately predict the dynamics of the ASV under wind disturbances. The performance of the proposed scheme under wind disturbances is tested and compared against other controllers in simulation, using the Robotics Operating System (ROS) and the multipurpose simulation environment Gazebo. A set of six tests were conducted by combining two wind speeds (3 m/s and 6 m/s) and three wind directions (0$^\circ$, 90$^\circ$, and 180$^\circ$). The simulation results clearly show the advantage of the NNSEM-MPC over the following methods: backstepping controller, sliding mode controller, simplified dynamics MPC (SD-MPC), neural ordinary differential equation MPC (NODE-MPC), and knowledge-based NODE MPC (KNODE-MPC). The proposed NNSEM-MPC approach performs better than the rest in 4 out of the 6 test conditions, and it is the second best in the 2 remaining test cases, reducing the mean position and heading error by at least 31\% and 46\% respectively across all the test cases. In terms of execution speed, the proposed NNSEM-MPC is at least 36\% faster than the rest of the MPC controllers. The field experiments on two different ASV platforms showed that ASVs can effectively keep the station utilizing the proposed method, with a position error as low as $1.68$ m and a heading error as low as $6.14^{\circ}$ within time windows of at least $150$s.