 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFixed-time control with prescribed performance for path following of underwater gliders
Dec 23, 2025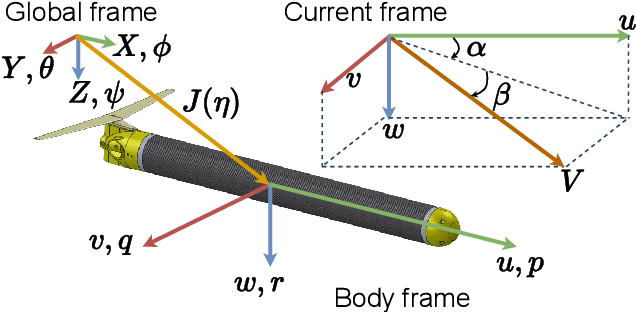

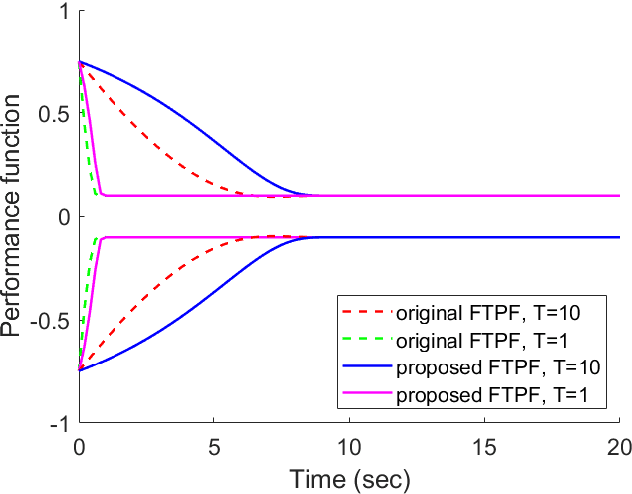
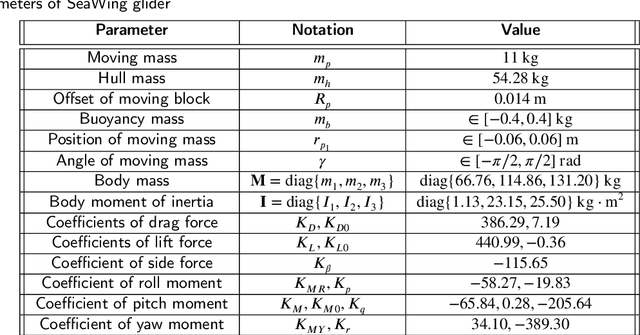
Underwater gliders are increasingly deployed in challenging missions - such as hurricane-season observations and long-endurance environmental monitoring - where strong currents and turbulence pose significant risks to navigation safety. To address these practical challenges, this paper presents a fixed-time prescribed performance control scheme for the 3D path following of underwater gliders subject to model uncertainties and environmental disturbances. The primary contribution is the integration of a finite-time performance function within a fixed-time control framework. This synthesis ensures that the tracking errors are constrained within prescribed performance bounds and converge to a compact set within a fixed time, independent of initial conditions. A second key contribution is the development of a fixed-time sliding mode disturbance observer that provides accurate finite-time estimation of lumped disturbances, enhancing the system's robustness. Integrated with an iLOS guidance law, the proposed controller enables precise and safe waypoint following. Numerical simulations demonstrate that the proposed method outperforms conventional sliding mode and prescribed performance controllers in tracking accuracy, convergence speed, and control effort smoothness, validating its efficacy for robust underwater navigation.
Vision-driven River Following of UAV via Safe Reinforcement Learning using Semantic Dynamics Model
Aug 13, 2025Vision-driven autonomous river following by Unmanned Aerial Vehicles is critical for applications such as rescue, surveillance, and environmental monitoring, particularly in dense riverine environments where GPS signals are unreliable. We formalize river following as a coverage control problem in which the reward function is submodular, yielding diminishing returns as more unique river segments are visited, thereby framing the task as a Submodular Markov Decision Process. First, we introduce Marginal Gain Advantage Estimation, which refines the reward advantage function by using a sliding window baseline computed from historical episodic returns, thus aligning the advantage estimation with the agent's evolving recognition of action value in non-Markovian settings. Second, we develop a Semantic Dynamics Model based on patchified water semantic masks that provides more interpretable and data-efficient short-term prediction of future observations compared to latent vision dynamics models. Third, we present the Constrained Actor Dynamics Estimator architecture, which integrates the actor, the cost estimator, and SDM for cost advantage estimation to form a model-based SafeRL framework capable of solving partially observable Constrained Submodular Markov Decision Processes. Simulation results demonstrate that MGAE achieves faster convergence and superior performance over traditional critic-based methods like Generalized Advantage Estimation. SDM provides more accurate short-term state predictions that enable the cost estimator to better predict potential violations. Overall, CADE effectively integrates safety regulation into model-based RL, with the Lagrangian approach achieving the soft balance of reward and safety during training, while the safety layer enhances performance during inference by hard action overlay.
Vision-driven UAV River Following: Benchmarking with Safe Reinforcement Learning
Sep 13, 2024
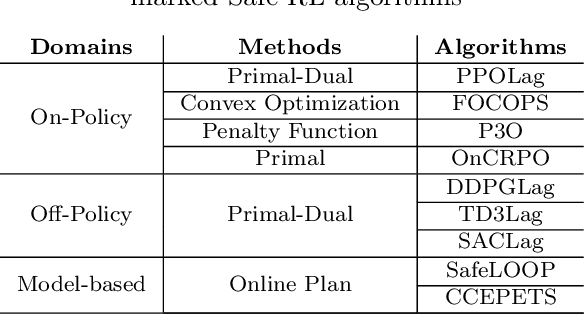
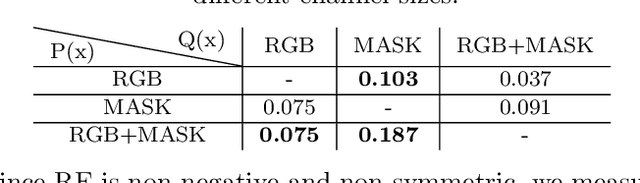
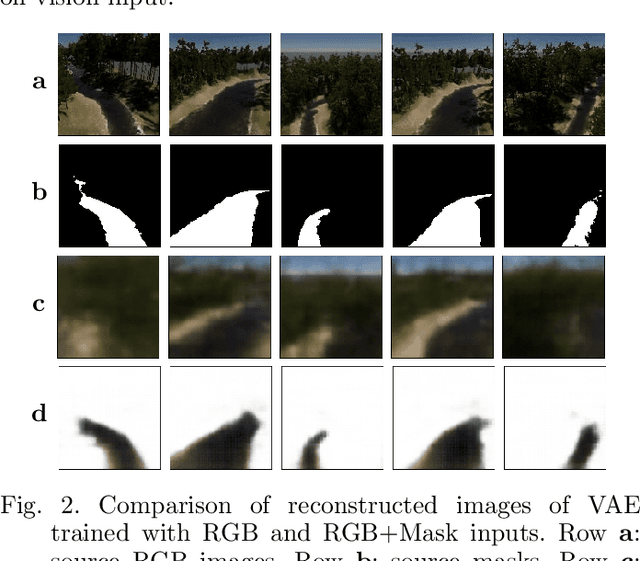
In this study, we conduct a comprehensive benchmark of the Safe Reinforcement Learning (Safe RL) algorithms for the task of vision-driven river following of Unmanned Aerial Vehicle (UAV) in a Unity-based photo-realistic simulation environment. We empirically validate the effectiveness of semantic-augmented image encoding method, assessing its superiority based on Relative Entropy and the quality of water pixel reconstruction. The determination of the encoding dimension, guided by reconstruction loss, contributes to a more compact state representation, facilitating the training of Safe RL policies. Across all benchmarked Safe RL algorithms, we find that First Order Constrained Optimization in Policy Space achieves the optimal balance between reward acquisition and safety compliance. Notably, our results reveal that on-policy algorithms consistently outperform both off-policy and model-based counterparts in both training and testing environments. Importantly, the benchmarking outcomes and the vision encoding methodology extend beyond UAVs, and are applicable to Autonomous Surface Vehicles (ASVs) engaged in autonomous navigation in confined waters.
C3D: Cascade Control with Change Point Detection and Deep Koopman Learning for Autonomous Surface Vehicles
Mar 14, 2024In this paper, we discuss the development and deployment of a robust autonomous system capable of performing various tasks in the maritime domain under unknown dynamic conditions. We investigate a data-driven approach based on modular design for ease of transfer of autonomy across different maritime surface vessel platforms. The data-driven approach alleviates issues related to a priori identification of system models that may become deficient under evolving system behaviors or shifting, unanticipated, environmental influences. Our proposed learning-based platform comprises a deep Koopman system model and a change point detector that provides guidance on domain shifts prompting relearning under severe exogenous and endogenous perturbations. Motion control of the autonomous system is achieved via an optimal controller design. The Koopman linearized model naturally lends itself to a linear-quadratic regulator (LQR) control design. We propose the C3D control architecture Cascade Control with Change Point Detection and Deep Koopman Learning. The framework is verified in station keeping task on an ASV in both simulation and real experiments. The approach achieved at least 13.9 percent improvement in mean distance error in all test cases compared to the methods that do not consider system changes.
Effective Underwater Glider Path Planning in Dynamic 3D Environments Using Multi-Point Potential Fields
Mar 13, 2024Underwater gliders (UGs) have emerged as highly effective unmanned vehicles for ocean exploration. However, their operation in dynamic and complex underwater environments necessitates robust path-planning strategies. Previous studies have primarily focused on global energy or time-efficient path planning in explored environments, overlooking challenges posed by unpredictable flow conditions and unknown obstacles in varying and dynamic areas like fjords and near-harbor waters. This paper introduces and improves a real-time path planning method, Multi-Point Potential Field (MPPF), tailored for UGs operating in 3D space as they are constrained by buoyancy propulsion and internal actuation. The proposed MPPF method addresses obstacles, flow fields, and local minima, enhancing the efficiency and robustness of UG path planning. A low-cost prototype, the Research Oriented Underwater Glider for Hands-on Investigative Engineering (ROUGHIE), is utilized for validation. Through case studies and simulations, the efficacy of the enhanced MPPF method is demonstrated, highlighting its potential for real-world applications in underwater exploration.
Gliding in extreme waters: Dynamic Modeling and Nonlinear Control of an Agile Underwater Glider
Feb 08, 2024This paper describes the modeling of a custom-made underwater glider capable of flexible maneuvers in constrained areas and proposes a control system. Due to the lack of external actuators, underwater gliders can be greatly influenced by environmental disturbance. In addition, the nonlinearity of the system affects the motions during the transition between each flight segment. Here, a data-driven parameter estimation experimental methodology is proposed to identify the nonlinear dynamics model for our underwater glider using an underwater motion capture system. Then, a nonlinear system controller is designed based on Lyapunov function to overcome environmental disturbance, potential modeling errors, and nonlinearity during flight state transitions. The capability of lowering the impact of environmental disturbance is validated in simulations. A hybrid control system applying PID controller to maintain steady state flights and the proposed controller to switch between states is also demonstrated by performing complex maneuvers in simulation. The proposed control system can be applied to gliders for reliable navigation in dynamic water areas such as fjords where the sea conditions may vary from calm to rough seasonally.
Vision-driven Autonomous Flight of UAV Along River Using Deep Reinforcement Learning with Dynamic Expert Guidance
Jan 17, 2024Vision-driven autonomous flight and obstacle avoidance of Unmanned Aerial Vehicles (UAVs) along complex riverine environments for tasks like rescue and surveillance requires a robust control policy, which is yet difficult to obtain due to the shortage of trainable river environment simulators and reward sparsity in such environments. To easily verify the navigation controller performance for the river following task before real-world deployment, we developed a trainable photo-realistic dynamics-free riverine simulation environment using Unity. Successful river following trajectories in the environment are manually collected and Behavior Clone (BC) is used to train an Imitation Learning (IL) agent to mimic expert behavior and generate expert guidance. Finally, a framework is proposed to train a Deep Reinforcement Learning (DRL) agent using BC expert guidance and improve the expert policy online by sampling good demonstrations produced by the DRL to increase convergence rate and policy performance. This framework is able to solve the along-river autonomous navigation task and outperform baseline RL and IL methods. The code and trainable environments are available.
An Efficient Detection and Control System for Underwater Docking using Machine Learning and Realistic Simulation: A Comprehensive Approach
Nov 06, 2023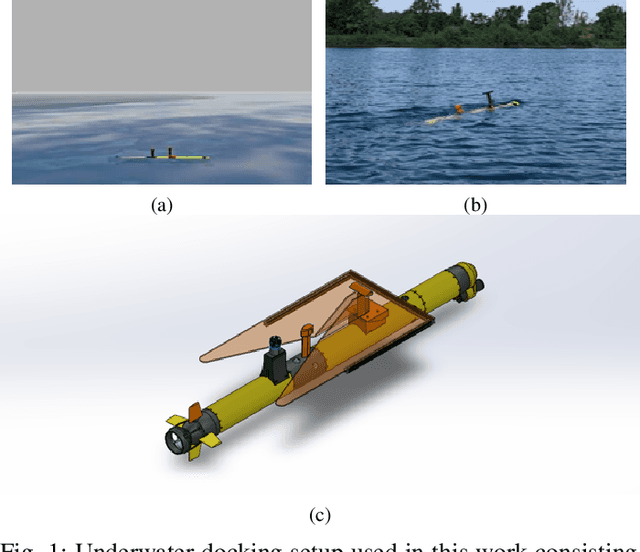
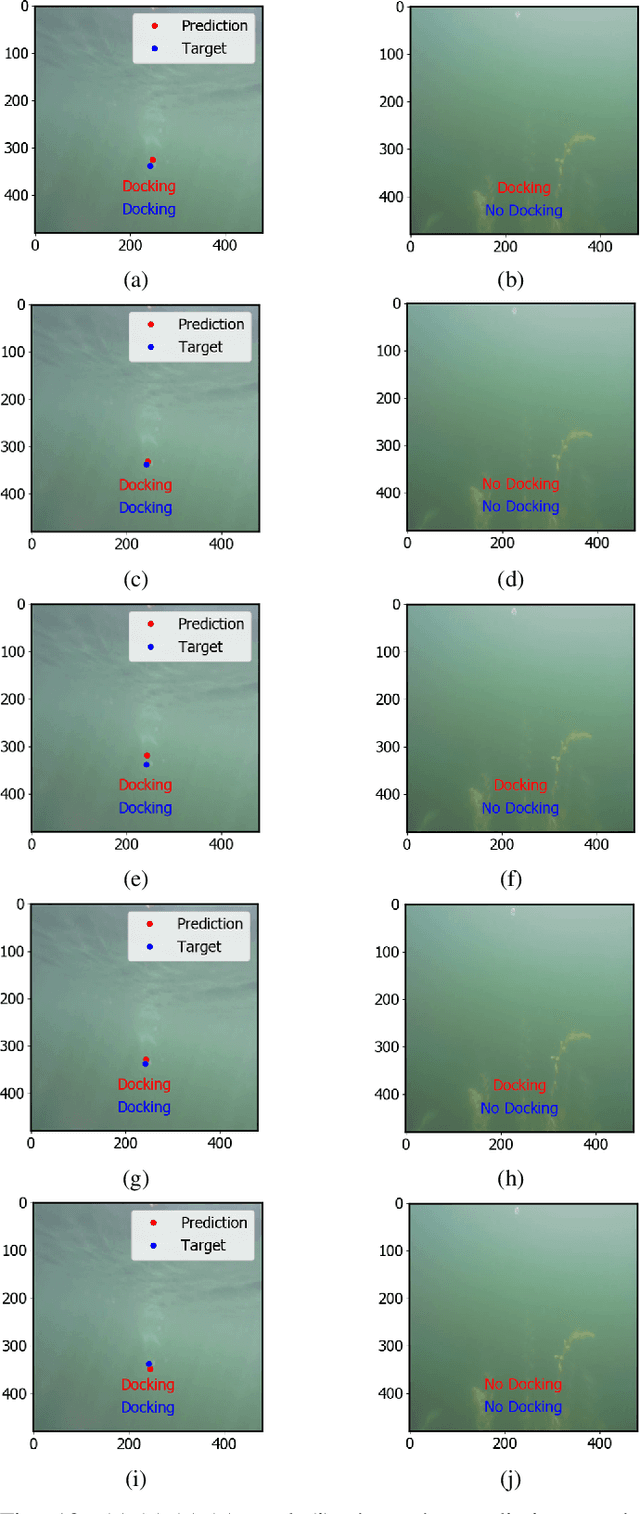
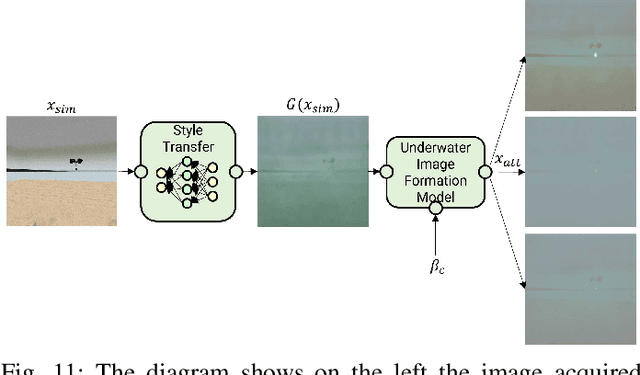
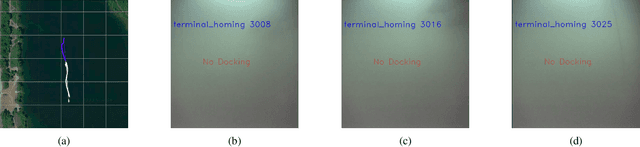
Underwater docking is critical to enable the persistent operation of Autonomous Underwater Vehicles (AUVs). For this, the AUV must be capable of detecting and localizing the docking station, which is complex due to the highly dynamic undersea environment. Image-based solutions offer a high acquisition rate and versatile alternative to adapt to this environment; however, the underwater environment presents challenges such as low visibility, high turbidity, and distortion. In addition to this, field experiments to validate underwater docking capabilities can be costly and dangerous due to the specialized equipment and safety considerations required to conduct the experiments. This work compares different deep-learning architectures to perform underwater docking detection and classification. The architecture with the best performance is then compressed using knowledge distillation under the teacher-student paradigm to reduce the network's memory footprint, allowing real-time implementation. To reduce the simulation-to-reality gap, a Generative Adversarial Network (GAN) is used to do image-to-image translation, converting the Gazebo simulation image into a realistic underwater-looking image. The obtained image is then processed using an underwater image formation model to simulate image attenuation over distance under different water types. The proposed method is finally evaluated according to the AUV docking success rate and compared with classical vision methods. The simulation results show an improvement of 20% in the high turbidity scenarios regardless of the underwater currents. Furthermore, we show the performance of the proposed approach by showing experimental results on the off-the-shelf AUV Iver3.
ASV Station Keeping under Wind Disturbances using Neural Network Simulation Error Minimization Model Predictive Control
Oct 11, 2023Station keeping is an essential maneuver for Autonomous Surface Vehicles (ASVs), mainly when used in confined spaces, to carry out surveys that require the ASV to keep its position or in collaboration with other vehicles where the relative position has an impact over the mission. However, this maneuver can become challenging for classic feedback controllers due to the need for an accurate model of the ASV dynamics and the environmental disturbances. This work proposes a Model Predictive Controller using Neural Network Simulation Error Minimization (NNSEM-MPC) to accurately predict the dynamics of the ASV under wind disturbances. The performance of the proposed scheme under wind disturbances is tested and compared against other controllers in simulation, using the Robotics Operating System (ROS) and the multipurpose simulation environment Gazebo. A set of six tests were conducted by combining two wind speeds (3 m/s and 6 m/s) and three wind directions (0$^\circ$, 90$^\circ$, and 180$^\circ$). The simulation results clearly show the advantage of the NNSEM-MPC over the following methods: backstepping controller, sliding mode controller, simplified dynamics MPC (SD-MPC), neural ordinary differential equation MPC (NODE-MPC), and knowledge-based NODE MPC (KNODE-MPC). The proposed NNSEM-MPC approach performs better than the rest in 4 out of the 6 test conditions, and it is the second best in the 2 remaining test cases, reducing the mean position and heading error by at least 31\% and 46\% respectively across all the test cases. In terms of execution speed, the proposed NNSEM-MPC is at least 36\% faster than the rest of the MPC controllers. The field experiments on two different ASV platforms showed that ASVs can effectively keep the station utilizing the proposed method, with a position error as low as $1.68$ m and a heading error as low as $6.14^{\circ}$ within time windows of at least $150$s.
Neural Network-PSO-based Velocity Control Algorithm for Landing UAVs on a Boat
Sep 24, 2023Precise landing of Unmanned Aerial Vehicles (UAVs) onto moving platforms like Autonomous Surface Vehicles (ASVs) is both important and challenging, especially in GPS-denied environments, for collaborative navigation of heterogeneous vehicles. UAVs need to land within a confined space onboard ASV to get energy replenishment, while ASV is subject to translational and rotational disturbances due to wind and water flow. Current solutions either rely on high-level waypoint navigation, which struggles to robustly land on varied-speed targets, or necessitate laborious manual tuning of controller parameters, and expensive sensors for target localization. Therefore, we propose an adaptive velocity control algorithm that leverages Particle Swarm Optimization (PSO) and Neural Network (NN) to optimize PID parameters across varying flight altitudes and distinct speeds of a moving boat. The cost function of PSO includes the status change rates of UAV and proximity to the target. The NN further interpolates the PSO-founded PID parameters. The proposed method implemented on a water strider hexacopter design, not only ensures accuracy but also increases robustness. Moreover, this NN-PSO can be readily adapted to suit various mission requirements. Its ability to achieve precise landings extends its applicability to scenarios, including but not limited to rescue missions, package deliveries, and workspace inspections.