 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeural Network-PSO-based Velocity Control Algorithm for Landing UAVs on a Boat
Sep 24, 2023Precise landing of Unmanned Aerial Vehicles (UAVs) onto moving platforms like Autonomous Surface Vehicles (ASVs) is both important and challenging, especially in GPS-denied environments, for collaborative navigation of heterogeneous vehicles. UAVs need to land within a confined space onboard ASV to get energy replenishment, while ASV is subject to translational and rotational disturbances due to wind and water flow. Current solutions either rely on high-level waypoint navigation, which struggles to robustly land on varied-speed targets, or necessitate laborious manual tuning of controller parameters, and expensive sensors for target localization. Therefore, we propose an adaptive velocity control algorithm that leverages Particle Swarm Optimization (PSO) and Neural Network (NN) to optimize PID parameters across varying flight altitudes and distinct speeds of a moving boat. The cost function of PSO includes the status change rates of UAV and proximity to the target. The NN further interpolates the PSO-founded PID parameters. The proposed method implemented on a water strider hexacopter design, not only ensures accuracy but also increases robustness. Moreover, this NN-PSO can be readily adapted to suit various mission requirements. Its ability to achieve precise landings extends its applicability to scenarios, including but not limited to rescue missions, package deliveries, and workspace inspections.
Affective Workload Allocation for Multi-human Multi-robot Teams
Mar 18, 2023



The interaction and collaboration between humans and multiple robots represent a novel field of research known as human multi-robot systems. Adequately designed systems within this field allow teams composed of both humans and robots to work together effectively on tasks such as monitoring, exploration, and search and rescue operations. This paper presents a deep reinforcement learning-based affective workload allocation controller specifically for multi-human multi-robot teams. The proposed controller can dynamically reallocate workloads based on the performance of the operators during collaborative missions with multi-robot systems. The operators' performances are evaluated through the scores of a self-reported questionnaire (i.e., subjective measurement) and the results of a deep learning-based cognitive workload prediction algorithm that uses physiological and behavioral data (i.e., objective measurement). To evaluate the effectiveness of the proposed controller, we use a multi-human multi-robot CCTV monitoring task as an example and carry out comprehensive real-world experiments with 32 human subjects for both quantitative measurement and qualitative analysis. Our results demonstrate the performance and effectiveness of the proposed controller and highlight the importance of incorporating both subjective and objective measurements of the operators' cognitive workload as well as seeking consent for workload transitions, to enhance the performance of multi-human multi-robot teams.
Inspection-on-the-fly using Hybrid Physical Interaction Control for Aerial Manipulators
Oct 19, 2020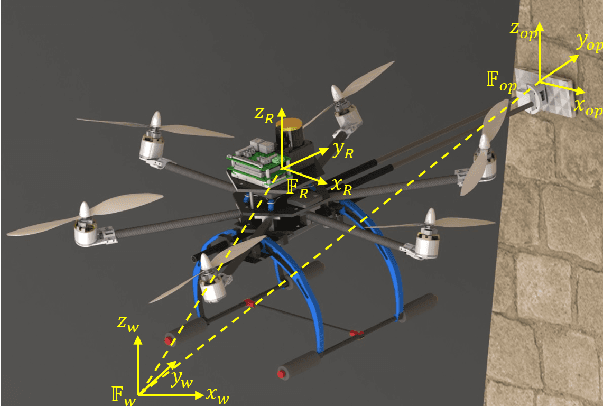
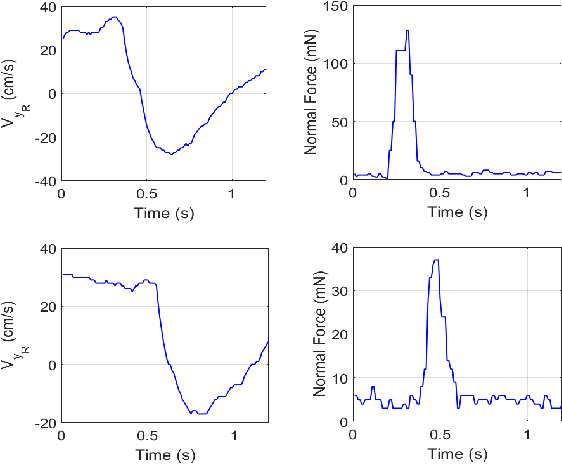
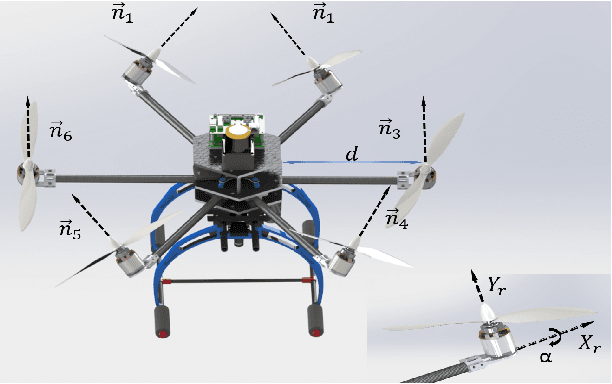
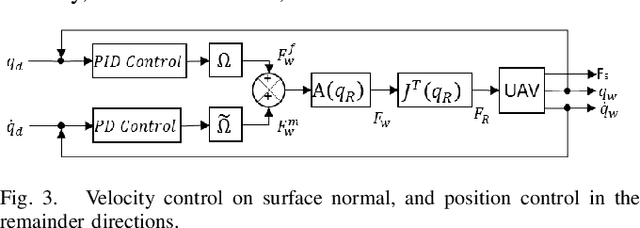
Inspection for structural properties (surface stiffness and coefficient of restitution) is crucial for understanding and performing aerial manipulations in unknown environments, with little to no prior knowledge on their state. Inspection-on-the-fly is the uncanny ability of humans to infer states during manipulation, reducing the necessity to perform inspection and manipulation separately. This paper presents an infrastructure for inspection-on-the-fly method for aerial manipulators using hybrid physical interaction control. With the proposed method, structural properties (surface stiffness and coefficient of restitution) can be estimated during physical interactions. A three-stage hybrid physical interaction control paradigm is presented to robustly approach, acquire and impart a desired force signature onto a surface. This is achieved by combining a hybrid force/motion controller with a model-based feed-forward impact control as intermediate phase. The proposed controller ensures a steady transition from unconstrained motion control to constrained force control, while reducing the lag associated with the force control phase. And an underlying Operational Space dynamic configuration manager permits complex, redundant vehicle/arm combinations. Experiments were carried out in a mock-up of a Dept. of Energy exhaust shaft, to show the effectiveness of the inspection-on-the-fly method to determine the structural properties of the target surface and the performance of the hybrid physical interaction controller in reducing the lag associated with force control phase.
* This paper has been accept for IROS 2020 publication
Coregionalised Locomotion Envelopes - A Qualitative Approach
Mar 13, 2018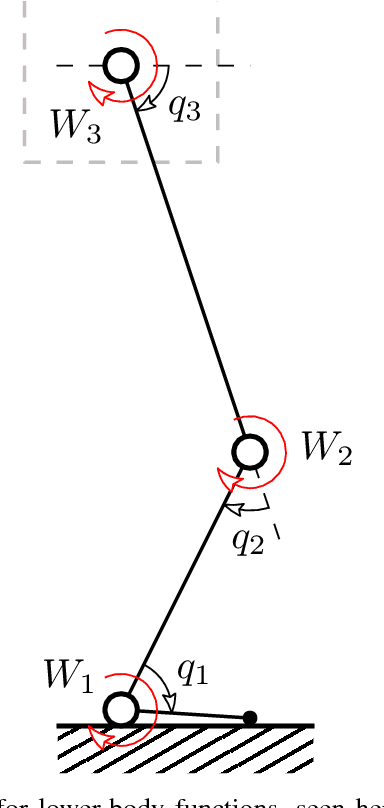
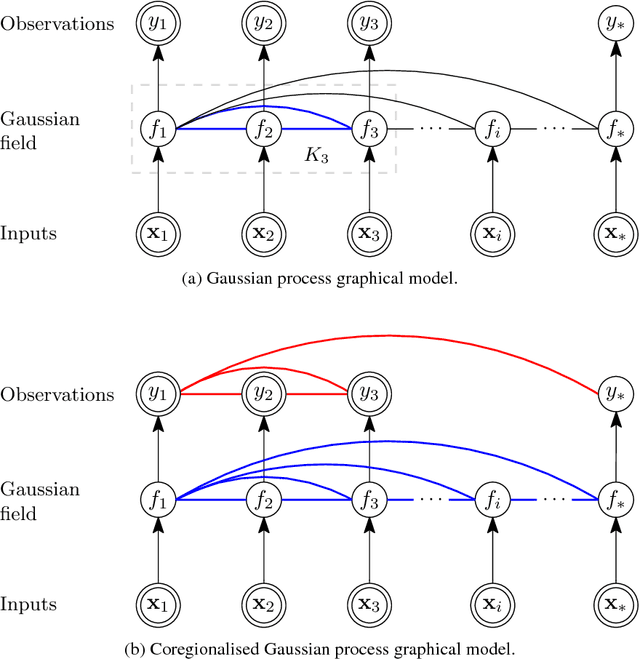

'Sharing of statistical strength' is a phrase often employed in machine learning and signal processing. In sensor networks, for example, missing signals from certain sensors may be predicted by exploiting their correlation with observed signals acquired from other sensors. For humans, our hands move synchronously with our legs, and we can exploit these implicit correlations for predicting new poses and for generating new natural-looking walking sequences. We can also go much further and exploit this form of transfer learning, to develop new control schemas for robust control of rehabilitation robots. In this short paper we introduce coregionalised locomotion envelopes - a method for multi-dimensional manifold regression, on human locomotion variates. Herein we render a qualitative description of this method.