 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFixed-time control with prescribed performance for path following of underwater gliders
Dec 23, 2025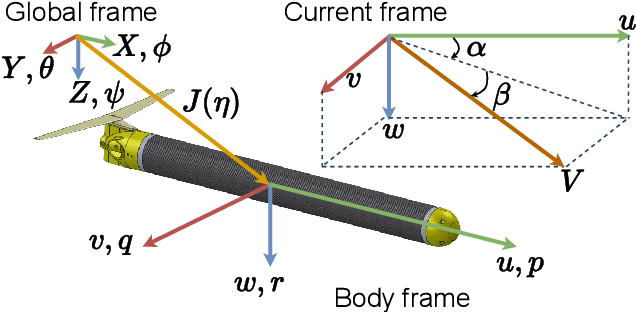

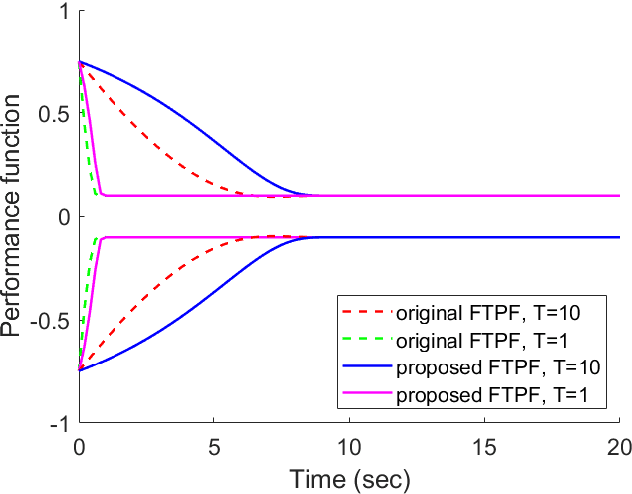
Underwater gliders are increasingly deployed in challenging missions - such as hurricane-season observations and long-endurance environmental monitoring - where strong currents and turbulence pose significant risks to navigation safety. To address these practical challenges, this paper presents a fixed-time prescribed performance control scheme for the 3D path following of underwater gliders subject to model uncertainties and environmental disturbances. The primary contribution is the integration of a finite-time performance function within a fixed-time control framework. This synthesis ensures that the tracking errors are constrained within prescribed performance bounds and converge to a compact set within a fixed time, independent of initial conditions. A second key contribution is the development of a fixed-time sliding mode disturbance observer that provides accurate finite-time estimation of lumped disturbances, enhancing the system's robustness. Integrated with an iLOS guidance law, the proposed controller enables precise and safe waypoint following. Numerical simulations demonstrate that the proposed method outperforms conventional sliding mode and prescribed performance controllers in tracking accuracy, convergence speed, and control effort smoothness, validating its efficacy for robust underwater navigation.
Trajectory tracking control of a Remotely Operated Underwater Vehicle based on Fuzzy Disturbance Adaptation and Controller Parameter Optimization
May 16, 2024The exploration of under-ice environments presents unique challenges due to limited access for scientific research. This report investigates the potential of deploying a fully actuated Remotely Operated Vehicle (ROV) for shallow area exploration beneath ice sheets. Leveraging advancements in marine robotics technology, ROVs offer a promising solution for extending human presence into remote underwater locations. To enable successful under-ice exploration, the ROV must follow precise trajectories for effective localization signal reception. This study develops a multi-input-multi-output (MIMO) nonlinear system controller, incorporating a Lyapunov-based stability guarantee and an adaptation law to mitigate unknown environmental disturbances. Fuzzy logic is employed to dynamically adjust adaptation rates, enhancing performance in highly nonlinear ROV dynamic systems. Additionally, a Particle Swarm Optimization (PSO) algorithm automates the tuning of controller parameters for optimal trajectory tracking. The report details the ROV dynamic model, the proposed control framework, and the PSO-based tuning process. Simulation-based experiments validate the efficacy of the methodology, with experimental results demonstrating superior trajectory tracking performance compared to baseline controllers. This work contributes to the advancement of under-ice exploration capabilities and sets the stage for future research in marine robotics and autonomous underwater systems.
Effective Underwater Glider Path Planning in Dynamic 3D Environments Using Multi-Point Potential Fields
Mar 13, 2024Underwater gliders (UGs) have emerged as highly effective unmanned vehicles for ocean exploration. However, their operation in dynamic and complex underwater environments necessitates robust path-planning strategies. Previous studies have primarily focused on global energy or time-efficient path planning in explored environments, overlooking challenges posed by unpredictable flow conditions and unknown obstacles in varying and dynamic areas like fjords and near-harbor waters. This paper introduces and improves a real-time path planning method, Multi-Point Potential Field (MPPF), tailored for UGs operating in 3D space as they are constrained by buoyancy propulsion and internal actuation. The proposed MPPF method addresses obstacles, flow fields, and local minima, enhancing the efficiency and robustness of UG path planning. A low-cost prototype, the Research Oriented Underwater Glider for Hands-on Investigative Engineering (ROUGHIE), is utilized for validation. Through case studies and simulations, the efficacy of the enhanced MPPF method is demonstrated, highlighting its potential for real-world applications in underwater exploration.
Gliding in extreme waters: Dynamic Modeling and Nonlinear Control of an Agile Underwater Glider
Feb 08, 2024This paper describes the modeling of a custom-made underwater glider capable of flexible maneuvers in constrained areas and proposes a control system. Due to the lack of external actuators, underwater gliders can be greatly influenced by environmental disturbance. In addition, the nonlinearity of the system affects the motions during the transition between each flight segment. Here, a data-driven parameter estimation experimental methodology is proposed to identify the nonlinear dynamics model for our underwater glider using an underwater motion capture system. Then, a nonlinear system controller is designed based on Lyapunov function to overcome environmental disturbance, potential modeling errors, and nonlinearity during flight state transitions. The capability of lowering the impact of environmental disturbance is validated in simulations. A hybrid control system applying PID controller to maintain steady state flights and the proposed controller to switch between states is also demonstrated by performing complex maneuvers in simulation. The proposed control system can be applied to gliders for reliable navigation in dynamic water areas such as fjords where the sea conditions may vary from calm to rough seasonally.
Enhancing SUMO simulator for simulation based testing and validation of autonomous vehicles
Sep 23, 2021

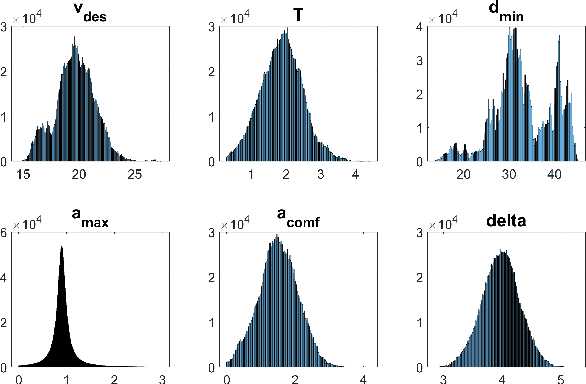
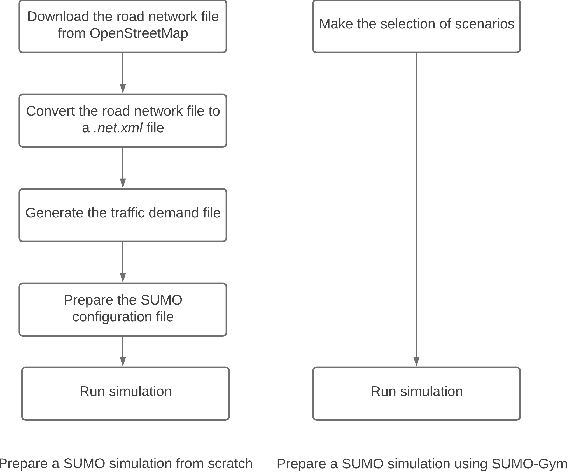
Current autonomous vehicle (AV) simulators are built to provide large-scale testing required to prove capabilities under varied conditions in controlled, repeatable fashion. However, they have certain failings including the need for user expertise and complex inconvenient tutorials for customized scenario creation. Simulation of Urban Mobility (SUMO) simulator, which has been presented as an open-source AV simulator, is used extensively but suffer from similar issues which make it difficult for entry-level practitioners to utilize the simulator without significant time investment. In that regard, we provide two enhancements to SUMO simulator geared towards massively improving user experience and providing real-life like variability for surrounding traffic. Firstly, we calibrate a car-following model, Intelligent Driver Model (IDM), for highway and urban naturalistic driving data and sample automatically from the parameter distributions to create the background vehicles. Secondly, we combine SUMO with OpenAI gym, creating a Python package which can run simulations based on real world highway and urban layouts with generic output observations and input actions that can be processed via any AV pipeline. Our aim through these enhancements is to provide an easy-to-use platform which can be readily used for AV testing and validation.