 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnhancing Safety of Students with Mobile Air Filtration during School Reopening from COVID-19
Apr 29, 2021



The paper discusses how robots enable occupant-safe continuous protection for students when schools reopen. Conventionally, fixed air filters are not used as a key pandemic prevention method for public indoor spaces because they are unable to trap the airborne pathogens in time in the entire room. However, by combining the mobility of a robot with air filtration, the efficacy of cleaning up the air around multiple people is largely increased. A disinfection co-robot prototype is thus developed to provide continuous and occupant-friendly protection to people gathering indoors, specifically for students in a classroom scenario. In a static classroom with students sitting in a grid pattern, the mobile robot is able to serve up to 14 students per cycle while reducing the worst-case pathogen dosage by 20%, and with higher robustness compared to a static filter. The extent of robot protection is optimized by tuning the passing distance and speed, such that a robot is able to serve more people given a threshold of worst-case dosage a person can receive.
Aerial Mobile Manipulator System to Enable Dexterous Manipulations with Increased Precision
Oct 19, 2020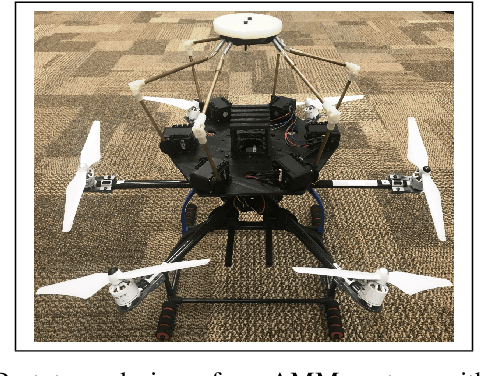

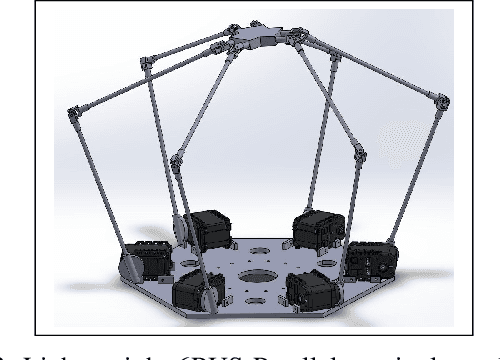
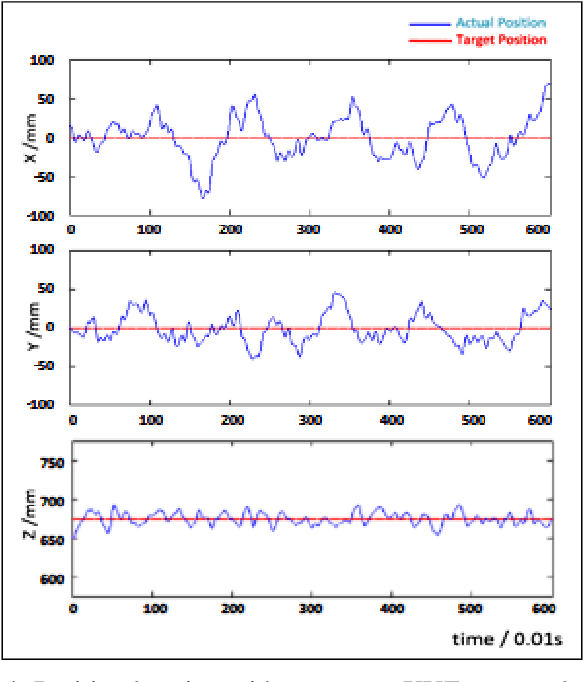
Problems associated with physical interactions using aerial mobile manipulators (AMM) are being independently addressed with respect to mobility and manipulability. Multirotor unmanned aerial vehicles (UAV) are a common choice for mobility while on-board manipulators are increasingly be used for manipulability. However, the dynamic coordination between the UAV and on-board manipulator remains a significant obstacle to enable dexterous manipulation with high precision. This paper presents an AMM system configuration to addresses both the mobility and manipulability issues together. A fully-actuated UAV is chosen to achieve dexterous aerial mobile manipulation, but is limited by the actuation range of the UAV. An on-board manipulator is employed to enhance the performance in terms of dexterity and precision at the end-effector. Experimental results on position keeping of the dexterous hexrotor by withstanding the disturbances caused by the motions of the on-board manipulator and external wind disturbances are presented. Preliminary simulation results on end-point tracking in a simple planar on-board manipulator case is presented.
* Accepted and Presented at ICRA 2019 workshop on High Accuracy Mobile Manipulation in Challenging Environments