 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLLM Performance Predictors: Learning When to Escalate in Hybrid Human-AI Moderation Systems
Jan 11, 2026As LLMs are increasingly integrated into human-in-the-loop content moderation systems, a central challenge is deciding when their outputs can be trusted versus when escalation for human review is preferable. We propose a novel framework for supervised LLM uncertainty quantification, learning a dedicated meta-model based on LLM Performance Predictors (LPPs) derived from LLM outputs: log-probabilities, entropy, and novel uncertainty attribution indicators. We demonstrate that our method enables cost-aware selective classification in real-world human-AI workflows: escalating high-risk cases while automating the rest. Experiments across state-of-the-art LLMs, including both off-the-shelf (Gemini, GPT) and open-source (Llama, Qwen), on multimodal and multilingual moderation tasks, show significant improvements over existing uncertainty estimators in accuracy-cost trade-offs. Beyond uncertainty estimation, the LPPs enhance explainability by providing new insights into failure conditions (e.g., ambiguous content vs. under-specified policy). This work establishes a principled framework for uncertainty-aware, scalable, and responsible human-AI moderation workflows.
Balancing Complexity and Informativeness in LLM-Based Clustering: Finding the Goldilocks Zone
Apr 06, 2025The challenge of clustering short text data lies in balancing informativeness with interpretability. Traditional evaluation metrics often overlook this trade-off. Inspired by linguistic principles of communicative efficiency, this paper investigates the optimal number of clusters by quantifying the trade-off between informativeness and cognitive simplicity. We use large language models (LLMs) to generate cluster names and evaluate their effectiveness through semantic density, information theory, and clustering accuracy. Our results show that Gaussian Mixture Model (GMM) clustering on embeddings generated by a LLM, increases semantic density compared to random assignment, effectively grouping similar bios. However, as clusters increase, interpretability declines, as measured by a generative LLM's ability to correctly assign bios based on cluster names. A logistic regression analysis confirms that classification accuracy depends on the semantic similarity between bios and their assigned cluster names, as well as their distinction from alternatives. These findings reveal a "Goldilocks zone" where clusters remain distinct yet interpretable. We identify an optimal range of 16-22 clusters, paralleling linguistic efficiency in lexical categorization. These insights inform both theoretical models and practical applications, guiding future research toward optimising cluster interpretability and usefulness.
Moving Past Single Metrics: Exploring Short-Text Clustering Across Multiple Resolutions
Feb 24, 2025Cluster number is typically a parameter selected at the outset in clustering problems, and while impactful, the choice can often be difficult to justify. Inspired by bioinformatics, this study examines how the nature of clusters varies with cluster number, presenting a method for determining cluster robustness, and providing a systematic method for deciding on the cluster number. The study focuses specifically on short-text clustering, involving 30,000 political Twitter bios, where the sparse co-occurrence of words between texts makes finding meaningful clusters challenging. A metric of proportional stability is introduced to uncover the stability of specific clusters between cluster resolutions, and the results are visualised using Sankey diagrams to provide an interrogative tool for understanding the nature of the dataset. The visualisation provides an intuitive way to track cluster subdivision and reorganisation as cluster number increases, offering insights that static, single-resolution metrics cannot capture. The results show that instead of seeking a single 'optimal' solution, choosing a cluster number involves balancing informativeness and complexity.
FIR-based Future Trajectory Prediction in Nighttime Autonomous Driving
Mar 31, 2023The performance of the current collision avoidance systems in Autonomous Vehicles (AV) and Advanced Driver Assistance Systems (ADAS) can be drastically affected by low light and adverse weather conditions. Collisions with large animals such as deer in low light cause significant cost and damage every year. In this paper, we propose the first AI-based method for future trajectory prediction of large animals and mitigating the risk of collision with them in low light. In order to minimize false collision warnings, in our multi-step framework, first, the large animal is accurately detected and a preliminary risk level is predicted for it and low-risk animals are discarded. In the next stage, a multi-stream CONV-LSTM-based encoder-decoder framework is designed to predict the future trajectory of the potentially high-risk animals. The proposed model uses camera motion prediction as well as the local and global context of the scene to generate accurate predictions. Furthermore, this paper introduces a new dataset of FIR videos for large animal detection and risk estimation in real nighttime driving scenarios. Our experiments show promising results of the proposed framework in adverse conditions. Our code is available online.
Planning Beyond the Sensing Horizon Using a Learned Context
Aug 24, 2019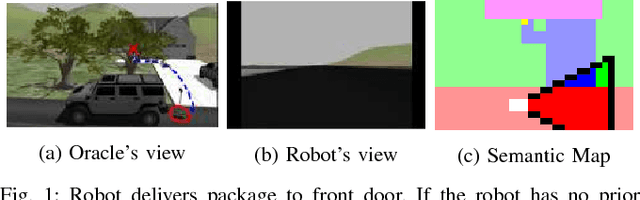

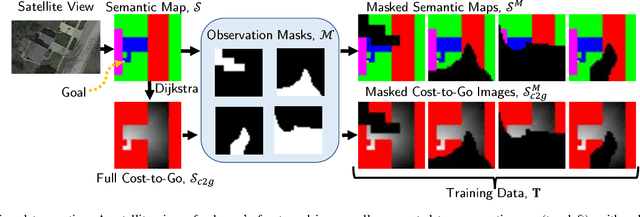

Last-mile delivery systems commonly propose the use of autonomous robotic vehicles to increase scalability and efficiency. The economic inefficiency of collecting accurate prior maps for navigation motivates the use of planning algorithms that operate in unmapped environments. However, these algorithms typically waste time exploring regions that are unlikely to contain the delivery destination. Context is key information about structured environments that could guide exploration toward the unknown goal location, but the abstract idea is difficult to quantify for use in a planning algorithm. Some approaches specifically consider contextual relationships between objects, but would perform poorly in object-sparse environments like outdoors. Recent deep learning-based approaches consider context too generally, making training/transferability difficult. Therefore, this work proposes a novel formulation of utilizing context for planning as an image-to-image translation problem, which is shown to extract terrain context from semantic gridmaps, into a metric that an exploration-based planner can use. The proposed framework has the benefit of training on a static dataset instead of requiring a time-consuming simulator. Across 42 test houses with layouts from satellite images, the trained algorithm enables a robot to reach its goal 189\% faster than with a context-unaware planner, and within 63\% of the optimal path computed with a prior map. The proposed algorithm is also implemented on a vehicle with a forward-facing camera in a high-fidelity, Unreal simulation of neighborhood houses.
Demand Estimation and Chance-Constrained Fleet Management for Ride Hailing
Jul 22, 2017

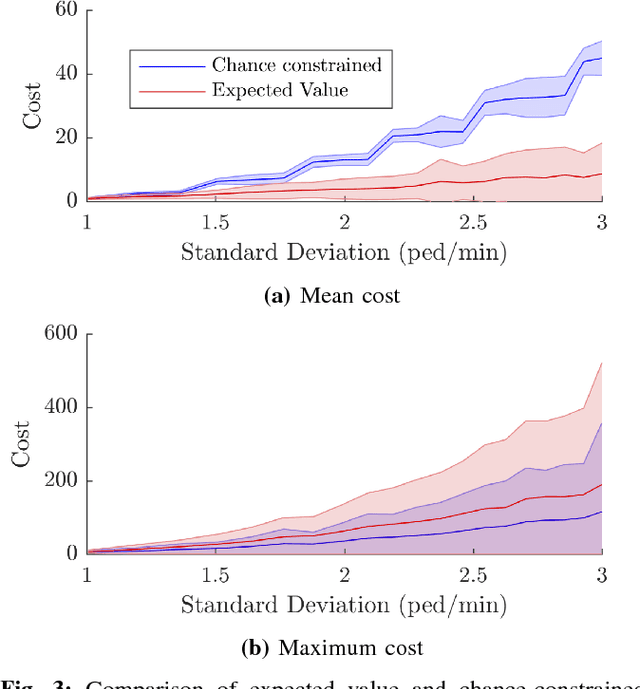

In autonomous Mobility on Demand (MOD) systems, customers request rides from a fleet of shared vehicles that can be automatically positioned in response to customer demand. Recent approaches to MOD systems have focused on environments where customers can only request rides through an app or by waiting at a station. This paper develops MOD fleet management approaches for ride hailing, where customers may instead request rides simply by hailing a passing vehicle, an approach of particular importance for campus MOD systems. The challenge for ride hailing is that customer demand is not explicitly provided as it would be with an app, but rather customers are only served if a vehicle happens to be located at the arrival location. This work focuses on maximizing the number of served hailing customers in an MOD system by learning and utilizing customer demand. A Bayesian framework is used to define a novel customer demand model which incorporates observed pedestrian traffic to estimate customer arrival locations with a quantification of uncertainty. An exploration planner is proposed which routes MOD vehicles in order to reduce arrival rate uncertainty. A robust ride hailing fleet management planner is proposed which routes vehicles under the presence of uncertainty using a chance-constrained formulation. Simulation of a real-world MOD system on MIT's campus demonstrates the effectiveness of the planners. The customer demand model and exploration planner are demonstrated to reduce estimation error over time and the ride hailing planner is shown to improve the fraction of served customers in the system by 73\% over a baseline exploration approach.
Dynamic Arrival Rate Estimation for Campus Mobility on Demand Network Graphs
Mar 06, 2017
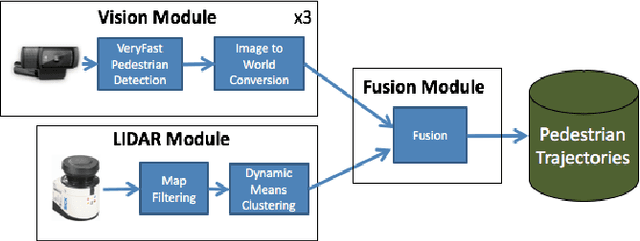


Mobility On Demand (MOD) systems are revolutionizing transportation in urban settings by improving vehicle utilization and reducing parking congestion. A key factor in the success of an MOD system is the ability to measure and respond to real-time customer arrival data. Real time traffic arrival rate data is traditionally difficult to obtain due to the need to install fixed sensors throughout the MOD network. This paper presents a framework for measuring pedestrian traffic arrival rates using sensors onboard the vehicles that make up the MOD fleet. A novel distributed fusion algorithm is presented which combines onboard LIDAR and camera sensor measurements to detect trajectories of pedestrians with a 90% detection hit rate with 1.5 false positives per minute. A novel moving observer method is introduced to estimate pedestrian arrival rates from pedestrian trajectories collected from mobile sensors. The moving observer method is evaluated in both simulation and hardware and is shown to achieve arrival rate estimates comparable to those that would be obtained with multiple stationary sensors.
* Appears in 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). http://ieeexplore.ieee.org/abstract/document/7759357/