 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSANDO: Safe Autonomous Trajectory Planning for Dynamic Unknown Environments
Apr 08, 2026SANDO is a safe trajectory planner for 3D dynamic unknown environments, where obstacle locations and motions are unknown a priori and a collision-free plan can become unsafe at any moment, requiring fast replanning. Existing soft-constraint planners are fast but cannot guarantee collision-free paths, while hard-constraint methods ensure safety at the cost of longer computation. SANDO addresses this trade-off through three contributions. First, a heat map-based A* global planner steers paths away from high-risk regions using soft costs, and a spatiotemporal safe flight corridor (STSFC) generator produces time-layered polytopes that inflate obstacles only by their worst-case reachable set at each time layer, rather than by the worst case over the entire horizon. Second, trajectory optimization is formulated as a Mixed-Integer Quadratic Program (MIQP) with hard collision-avoidance constraints, and a variable elimination technique reduces the number of decision variables, enabling fast computation. Third, a formal safety analysis establishes collision-free guarantees under explicit velocity-bound and estimation-error assumptions. Ablation studies show that variable elimination yields up to 7.4x speedup in optimization time, and that STSFCs are critical for feasibility in dense dynamic environments. Benchmark simulations against state-of-the-art methods across standardized static benchmarks, obstacle-rich static forests, and dynamic environments show that SANDO consistently achieves the highest success rate with no constraint violations across all difficulty levels; perception-only experiments without ground truth obstacle information confirm robust performance under realistic sensing. Hardware experiments on a UAV with fully onboard planning, perception, and localization demonstrate six safe flights in static environments and ten safe flights among dynamic obstacles.
Robust Dynamic Object Detection in Cluttered Indoor Scenes via Learned Spatiotemporal Cues
Mar 16, 2026Reliable dynamic object detection in cluttered environments remains a critical challenge for autonomous navigation. Purely geometric LiDAR pipelines that rely on clustering and heuristic filtering can miss dynamic obstacles when they move in close proximity to static structure or are only partially observed. Vision-augmented approaches can provide additional semantic cues, but are often limited by closed-set detectors and camera field-of-view constraints, reducing robustness to novel obstacles and out-of-frustum events. In this work, we present a LiDAR-only framework that fuses temporal occupancy-grid-based motion segmentation with a learned bird's-eye-view (BEV) dynamic prior. A fusion module prioritizes 3D detections when available, while using the learned dynamic grid to recover detections that would otherwise be lost due to proximity-induced false negatives. Experiments with motion-capture ground truth show our method achieves 28.67% higher recall and 18.50% higher F1 score than the state-of-the-art in substantially cluttered environments while maintaining comparable precision and position error.
Overlapping Domain Decomposition for Distributed Pose Graph Optimization
Mar 03, 2026We present ROBO (Riemannian Overlapping Block Optimization), a distributed and parallel approach to multi-robot pose graph optimization (PGO) based on the idea of overlapping domain decomposition. ROBO offers a middle ground between centralized and fully distributed solvers, where the amount of pose information shared between robots at each optimization iteration can be set according to the available communication resources. Sharing additional pose information between neighboring robots effectively creates overlapping optimization blocks in the underlying pose graph, which substantially reduces the number of iterations required to converge. Through extensive experiments on benchmark PGO datasets, we demonstrate the applicability and feasibility of ROBO in different initialization scenarios, using various cost functions, and under different communication regimes. We also analyze the tradeoff between the increased communication and local computation required by ROBO's overlapping blocks and the resulting faster convergence. We show that overlaps with an average inter-robot data cost of only 36 Kb per iteration can converge 3.1$\times$ faster in terms of iterations than state-of-the-art distributed PGO approaches. Furthermore, we develop an asynchronous variant of ROBO that is robust to network delays and suitable for real-world robotic applications.
Controlled Flight of an Insect-Scale Flapping-Wing Robot via Integrated Onboard Sensing and Computation
Feb 09, 2026Aerial insects can effortlessly navigate dense vegetation, whereas similarly sized aerial robots typically depend on offboard sensors and computation to maintain stable flight. This disparity restricts insect-scale robots to operation within motion capture environments, substantially limiting their applicability to tasks such as search-and-rescue and precision agriculture. In this work, we present a 1.29-gram aerial robot capable of hovering and tracking trajectories with solely onboard sensing and computation. The combination of a sensor suite, estimators, and a low-level controller achieved centimeter-scale positional flight accuracy. Additionally, we developed a hierarchical controller in which a human operator provides high-level commands to direct the robot's motion. In a 30-second flight experiment conducted outside a motion capture system, the robot avoided obstacles and ultimately landed on a sunflower. This level of sensing and computational autonomy represents a significant advancement for the aerial microrobotics community, further opening opportunities to explore onboard planning and power autonomy.
Navigation Around Unknown Space Objects Using Visible-Thermal Image Fusion
Dec 13, 2025As the popularity of on-orbit operations grows, so does the need for precise navigation around unknown resident space objects (RSOs) such as other spacecraft, orbital debris, and asteroids. The use of Simultaneous Localization and Mapping (SLAM) algorithms is often studied as a method to map out the surface of an RSO and find the inspector's relative pose using a lidar or conventional camera. However, conventional cameras struggle during eclipse or shadowed periods, and lidar, though robust to lighting conditions, tends to be heavier, bulkier, and more power-intensive. Thermal-infrared cameras can track the target RSO throughout difficult illumination conditions without these limitations. While useful, thermal-infrared imagery lacks the resolution and feature-richness of visible cameras. In this work, images of a target satellite in low Earth orbit are photo-realistically simulated in both visible and thermal-infrared bands. Pixel-level fusion methods are used to create visible/thermal-infrared composites that leverage the best aspects of each camera. Navigation errors from a monocular SLAM algorithm are compared between visible, thermal-infrared, and fused imagery in various lighting and trajectories. Fused imagery yields substantially improved navigation performance over visible-only and thermal-only methods.
MIGHTY: Hermite Spline-based Efficient Trajectory Planning
Nov 13, 2025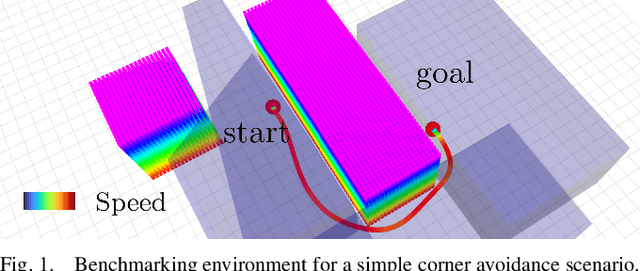
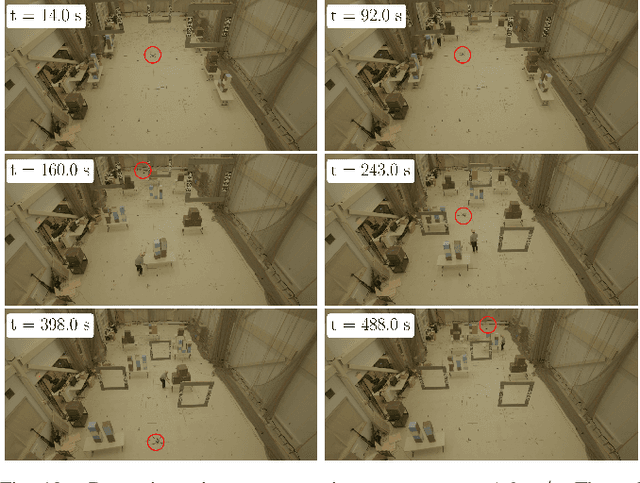
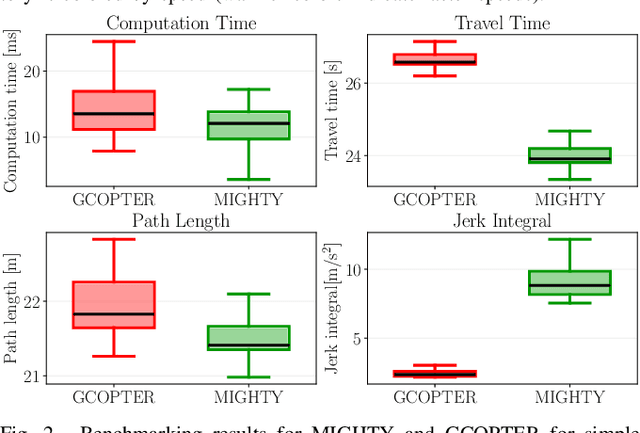
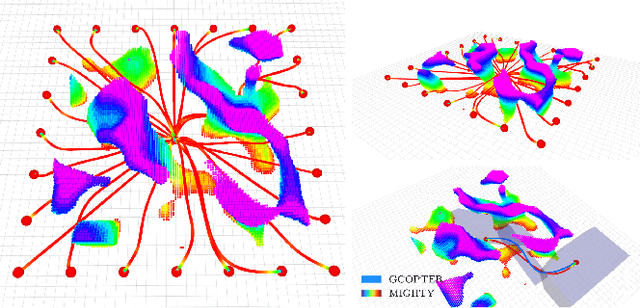
Hard-constraint trajectory planners often rely on commercial solvers and demand substantial computational resources. Existing soft-constraint methods achieve faster computation, but either (1) decouple spatial and temporal optimization or (2) restrict the search space. To overcome these limitations, we introduce MIGHTY, a Hermite spline-based planner that performs spatiotemporal optimization while fully leveraging the continuous search space of a spline. In simulation, MIGHTY achieves a 9.3% reduction in computation time and a 13.1% reduction in travel time over state-of-the-art baselines, with a 100% success rate. In hardware, MIGHTY completes multiple high-speed flights up to 6.7 m/s in a cluttered static environment and long-duration flights with dynamically added obstacles.
Efficient Probabilistic Planning with Maximum-Coverage Distributionally Robust Backward Reachable Trees
Oct 06, 2025This paper presents a new multi-query motion planning algorithm for linear Gaussian systems with the goal of reaching a Euclidean ball with high probability. We develop a new formulation for ball-shaped ambiguity sets of Gaussian distributions and leverage it to develop a distributionally robust belief roadmap construction algorithm. This algorithm synthe- sizes robust controllers which are certified to be safe for maximal size ball-shaped ambiguity sets of Gaussian distributions. Our algorithm achieves better coverage than the maximal coverage algorithm for planning over Gaussian distributions [1], and we identify mild conditions under which our algorithm achieves strictly better coverage. For the special case of no process noise or state constraints, we formally prove that our algorithm achieves maximal coverage. In addition, we present a second multi-query motion planning algorithm for linear Gaussian systems with the goal of reaching a region parameterized by the Minkowski sum of an ellipsoid and a Euclidean ball with high probability. This algorithm plans over ellipsoidal sets of maximal size ball-shaped ambiguity sets of Gaussian distributions, and provably achieves equal or better coverage than the best-known algorithm for planning over ellipsoidal ambiguity sets of Gaussian distributions [2]. We demonstrate the efficacy of both methods in a wide range of conditions via extensive simulation experiments.
Uncertainty-Aware Multi-Robot Task Allocation With Strongly Coupled Inter-Robot Rewards
Sep 26, 2025This paper proposes a task allocation algorithm for teams of heterogeneous robots in environments with uncertain task requirements. We model these requirements as probability distributions over capabilities and use this model to allocate tasks such that robots with complementary skills naturally position near uncertain tasks, proactively mitigating task failures without wasting resources. We introduce a market-based approach that optimizes the joint team objective while explicitly capturing coupled rewards between robots, offering a polynomial-time solution in decentralized settings with strict communication assumptions. Comparative experiments against benchmark algorithms demonstrate the effectiveness of our approach and highlight the challenges of incorporating coupled rewards in a decentralized formulation.
Distribution Estimation for Global Data Association via Approximate Bayesian Inference
Sep 19, 2025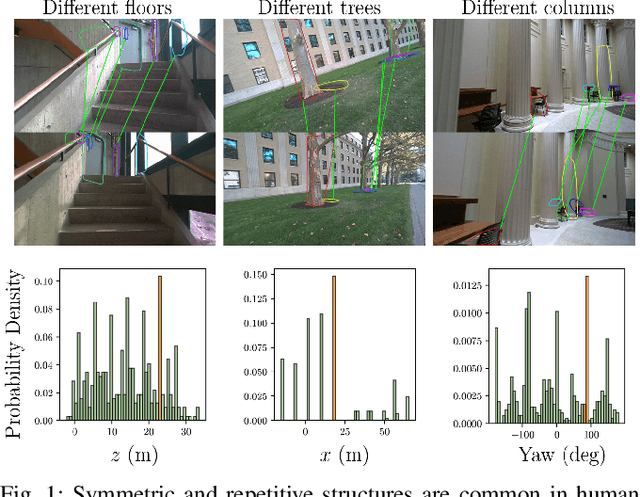
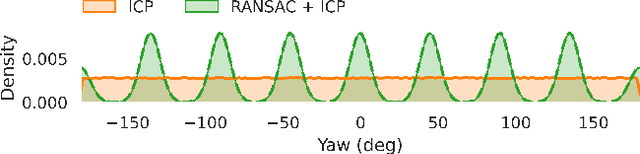
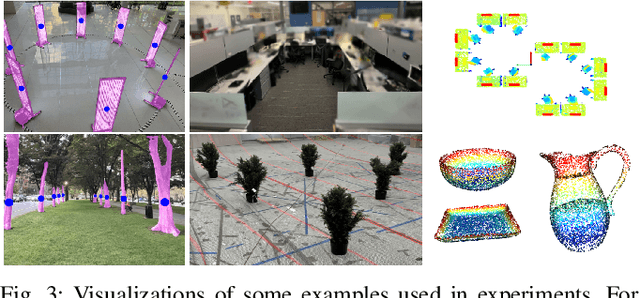
Global data association is an essential prerequisite for robot operation in environments seen at different times or by different robots. Repetitive or symmetric data creates significant challenges for existing methods, which typically rely on maximum likelihood estimation or maximum consensus to produce a single set of associations. However, in ambiguous scenarios, the distribution of solutions to global data association problems is often highly multimodal, and such single-solution approaches frequently fail. In this work, we introduce a data association framework that leverages approximate Bayesian inference to capture multiple solution modes to the data association problem, thereby avoiding premature commitment to a single solution under ambiguity. Our approach represents hypothetical solutions as particles that evolve according to a deterministic or randomized update rule to cover the modes of the underlying solution distribution. Furthermore, we show that our method can incorporate optimization constraints imposed by the data association formulation and directly benefit from GPU-parallelized optimization. Extensive simulated and real-world experiments with highly ambiguous data show that our method correctly estimates the distribution over transformations when registering point clouds or object maps.
GRAND-SLAM: Local Optimization for Globally Consistent Large-Scale Multi-Agent Gaussian SLAM
Jun 23, 20253D Gaussian splatting has emerged as an expressive scene representation for RGB-D visual SLAM, but its application to large-scale, multi-agent outdoor environments remains unexplored. Multi-agent Gaussian SLAM is a promising approach to rapid exploration and reconstruction of environments, offering scalable environment representations, but existing approaches are limited to small-scale, indoor environments. To that end, we propose Gaussian Reconstruction via Multi-Agent Dense SLAM, or GRAND-SLAM, a collaborative Gaussian splatting SLAM method that integrates i) an implicit tracking module based on local optimization over submaps and ii) an approach to inter- and intra-robot loop closure integrated into a pose-graph optimization framework. Experiments show that GRAND-SLAM provides state-of-the-art tracking performance and 28% higher PSNR than existing methods on the Replica indoor dataset, as well as 91% lower multi-agent tracking error and improved rendering over existing multi-agent methods on the large-scale, outdoor Kimera-Multi dataset.