 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVerti-Bench: A General and Scalable Off-Road Mobility Benchmark for Vertically Challenging Terrain
Feb 17, 2025



Recent advancement in off-road autonomy has shown promises in deploying autonomous mobile robots in outdoor off-road environments. Encouraging results have been reported from both simulated and real-world experiments. However, unlike evaluating off-road perception tasks on static datasets, benchmarking off-road mobility still faces significant challenges due to a variety of factors, including variations in vehicle platforms and terrain properties. Furthermore, different vehicle-terrain interactions need to be unfolded during mobility evaluation, which requires the mobility systems to interact with the environments instead of comparing against a pre-collected dataset. In this paper, we present Verti-Bench, a mobility benchmark that focuses on extremely rugged, vertically challenging off-road environments. 100 unique off-road environments and 1000 distinct navigation tasks with millions of off-road terrain properties, including a variety of geometry and semantics, rigid and deformable surfaces, and large natural obstacles, provide standardized and objective evaluation in high-fidelity multi-physics simulation. Verti-Bench is also scalable to various vehicle platforms with different scales and actuation mechanisms. We also provide datasets from expert demonstration, random exploration, failure cases (rolling over and getting stuck), as well as a gym-like interface for reinforcement learning. We use Verti-Bench to benchmark ten off-road mobility systems, present our findings, and identify future off-road mobility research directions.
M2P2: A Multi-Modal Passive Perception Dataset for Off-Road Mobility in Extreme Low-Light Conditions
Oct 01, 2024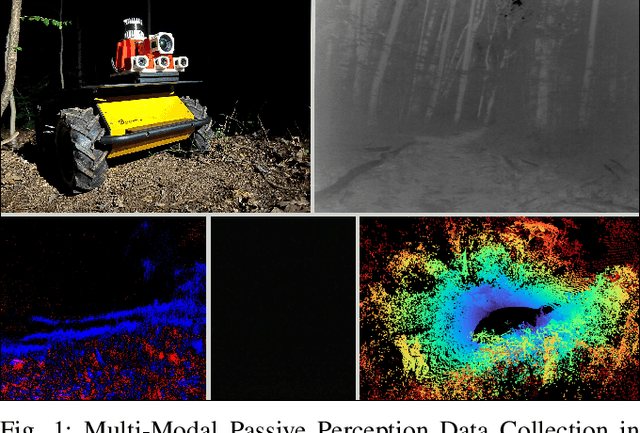
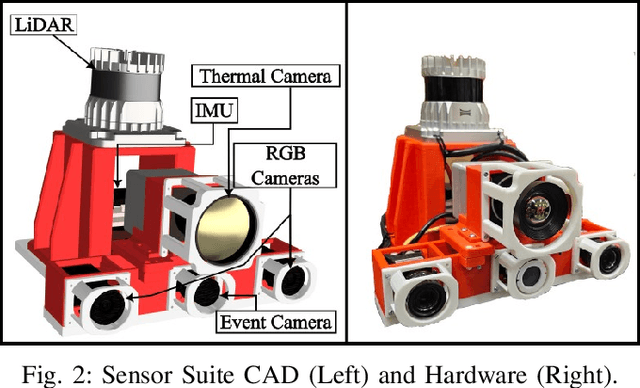
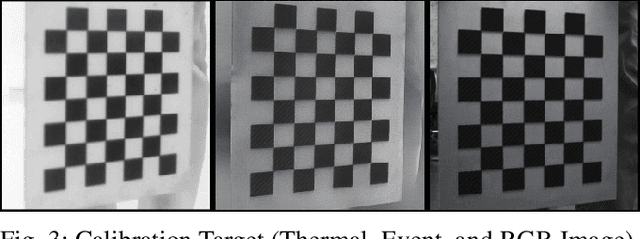
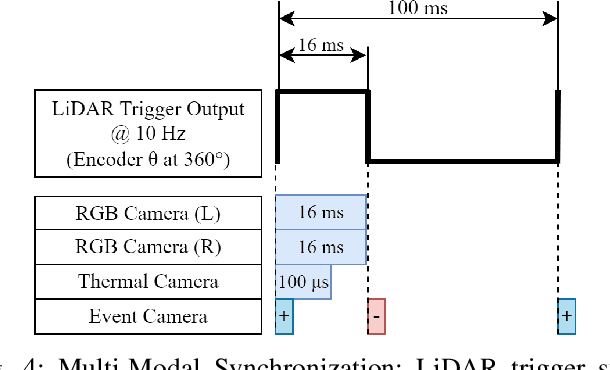
Long-duration, off-road, autonomous missions require robots to continuously perceive their surroundings regardless of the ambient lighting conditions. Most existing autonomy systems heavily rely on active sensing, e.g., LiDAR, RADAR, and Time-of-Flight sensors, or use (stereo) visible light imaging sensors, e.g., color cameras, to perceive environment geometry and semantics. In scenarios where fully passive perception is required and lighting conditions are degraded to an extent that visible light cameras fail to perceive, most downstream mobility tasks such as obstacle avoidance become impossible. To address such a challenge, this paper presents a Multi-Modal Passive Perception dataset, M2P2, to enable off-road mobility in low-light to no-light conditions. We design a multi-modal sensor suite including thermal, event, and stereo RGB cameras, GPS, two Inertia Measurement Units (IMUs), as well as a high-resolution LiDAR for ground truth, with a novel multi-sensor calibration procedure that can efficiently transform multi-modal perceptual streams into a common coordinate system. Our 10-hour, 32 km dataset also includes mobility data such as robot odometry and actions and covers well-lit, low-light, and no-light conditions, along with paved, on-trail, and off-trail terrain. Our results demonstrate that off-road mobility is possible through only passive perception in extreme low-light conditions using end-to-end learning and classical planning. The project website can be found at https://cs.gmu.edu/~xiao/Research/M2P2/
Verti-Selector: Automatic Curriculum Learning for Wheeled Mobility on Vertically Challenging Terrain
Sep 26, 2024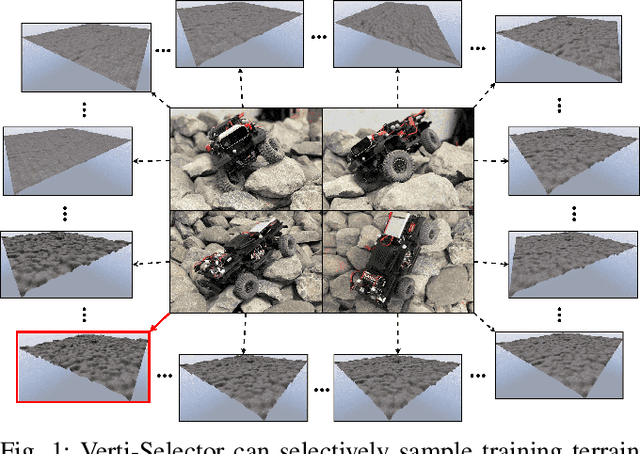
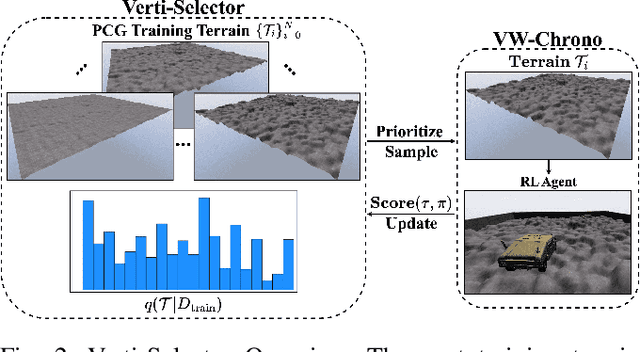
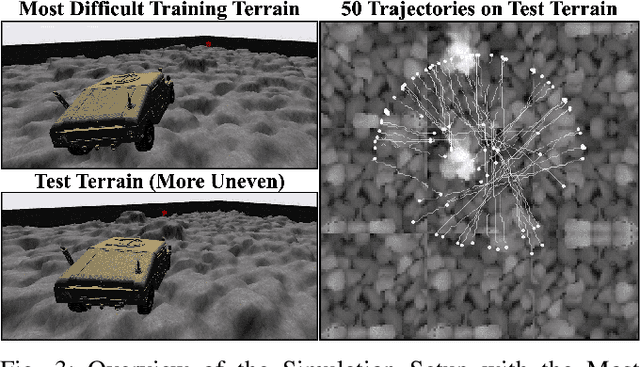
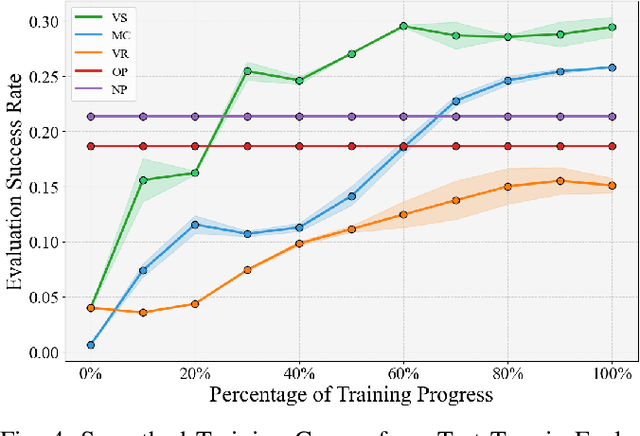
Reinforcement Learning (RL) has the potential to enable extreme off-road mobility by circumventing complex kinodynamic modeling, planning, and control by simulated end-to-end trial-and-error learning experiences. However, most RL methods are sample-inefficient when training in a large amount of manually designed simulation environments and struggle at generalizing to the real world. To address these issues, we introduce Verti-Selector (VS), an automatic curriculum learning framework designed to enhance learning efficiency and generalization by selectively sampling training terrain. VS prioritizes vertically challenging terrain with higher Temporal Difference (TD) errors when revisited, thereby allowing robots to learn at the edge of their evolving capabilities. By dynamically adjusting the sampling focus, VS significantly boosts sample efficiency and generalization within the VW-Chrono simulator built on the Chrono multi-physics engine. Furthermore, we provide simulation and physical results using VS on a Verti-4-Wheeler platform. These results demonstrate that VS can achieve 23.08% improvement in terms of success rate by efficiently sampling during training and robustly generalizing to the real world.
Traverse the Non-Traversable: Estimating Traversability for Wheeled Mobility on Vertically Challenging Terrain
Sep 26, 2024



Most traversability estimation techniques divide off-road terrain into traversable (e.g., pavement, gravel, and grass) and non-traversable (e.g., boulders, vegetation, and ditches) regions and then inform subsequent planners to produce trajectories on the traversable part. However, recent research demonstrated that wheeled robots can traverse vertically challenging terrain (e.g., extremely rugged boulders comparable in size to the vehicles themselves), which unfortunately would be deemed as non-traversable by existing techniques. Motivated by such limitations, this work aims at identifying the traversable from the seemingly non-traversable, vertically challenging terrain based on past kinodynamic vehicle-terrain interactions in a data-driven manner. Our new Traverse the Non-Traversable(TNT) traversability estimator can efficiently guide a down-stream sampling-based planner containing a high-precision 6-DoF kinodynamic model, which becomes deployable onboard a small-scale vehicle. Additionally, the estimated traversability can also be used as a costmap to plan global and local paths without sampling. Our experiment results show that TNT can improve planning performance, efficiency, and stability by 50%, 26.7%, and 9.2% respectively on a physical robot platform.
VertiEncoder: Self-Supervised Kinodynamic Representation Learning on Vertically Challenging Terrain
Sep 17, 2024



We present VertiEncoder, a self-supervised representation learning approach for robot mobility on vertically challenging terrain. Using the same pre-training process, VertiEncoder can handle four different downstream tasks, including forward kinodynamics learning, inverse kinodynamics learning, behavior cloning, and patch reconstruction with a single representation. VertiEncoder uses a TransformerEncoder to learn the local context of its surroundings by random masking and next patch reconstruction. We show that VertiEncoder achieves better performance across all four different tasks compared to specialized End-to-End models with 77% fewer parameters. We also show VertiEncoder's comparable performance against state-of-the-art kinodynamic modeling and planning approaches in real-world robot deployment. These results underscore the efficacy of VertiEncoder in mitigating overfitting and fostering more robust generalization across diverse environmental contexts and downstream vehicle kinodynamic tasks.
Reinforcement Learning for Wheeled Mobility on Vertically Challenging Terrain
Sep 04, 2024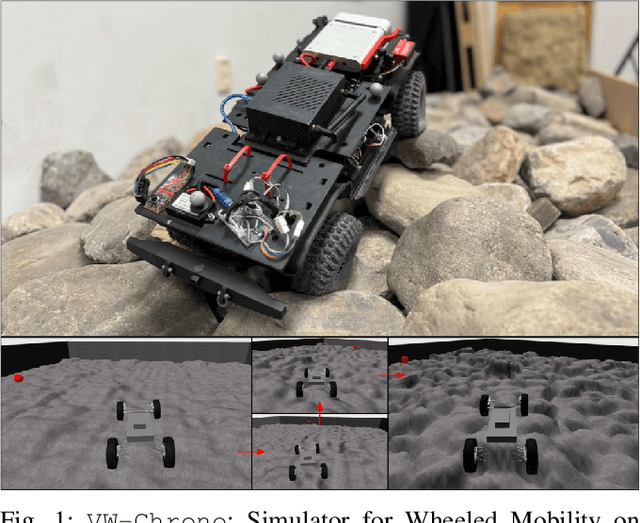
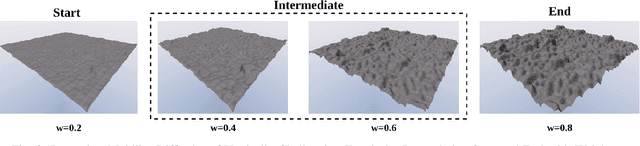
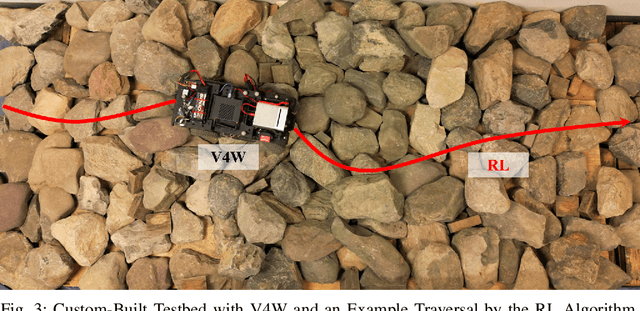
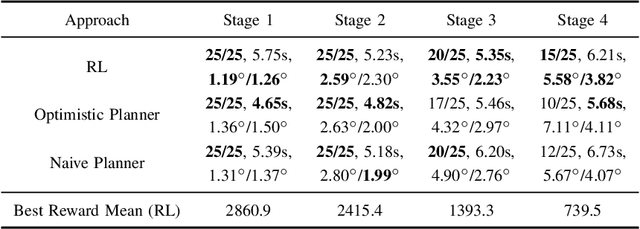
Off-road navigation on vertically challenging terrain, involving steep slopes and rugged boulders, presents significant challenges for wheeled robots both at the planning level to achieve smooth collision-free trajectories and at the control level to avoid rolling over or getting stuck. Considering the complex model of wheel-terrain interactions, we develop an end-to-end Reinforcement Learning (RL) system for an autonomous vehicle to learn wheeled mobility through simulated trial-and-error experiences. Using a custom-designed simulator built on the Chrono multi-physics engine, our approach leverages Proximal Policy Optimization (PPO) and a terrain difficulty curriculum to refine a policy based on a reward function to encourage progress towards the goal and penalize excessive roll and pitch angles, which circumvents the need of complex and expensive kinodynamic modeling, planning, and control. Additionally, we present experimental results in the simulator and deploy our approach on a physical Verti-4-Wheeler (V4W) platform, demonstrating that RL can equip conventional wheeled robots with previously unrealized potential of navigating vertically challenging terrain.
PIETRA: Physics-Informed Evidential Learning for Traversing Out-of-Distribution Terrain
Sep 04, 2024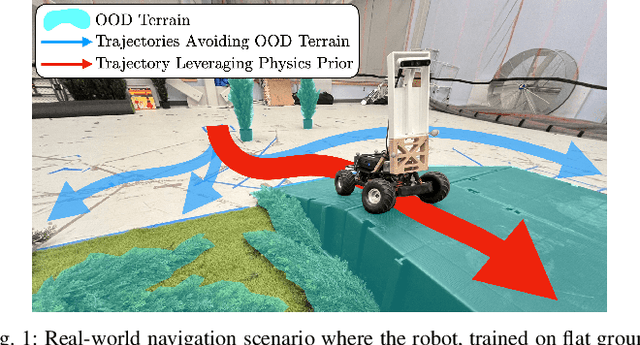
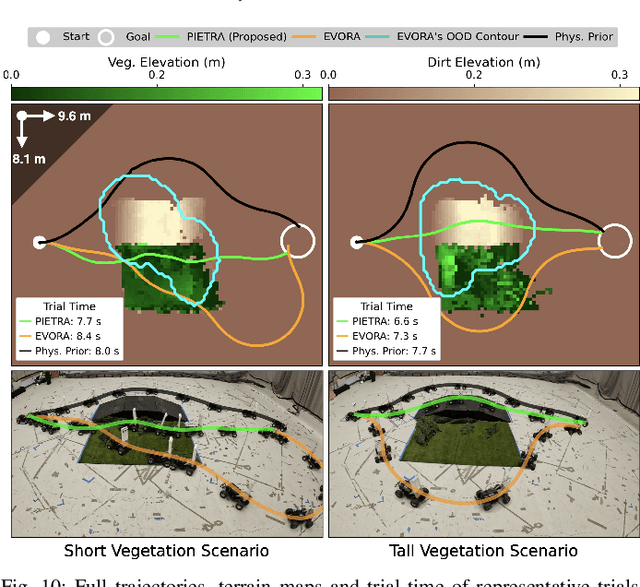
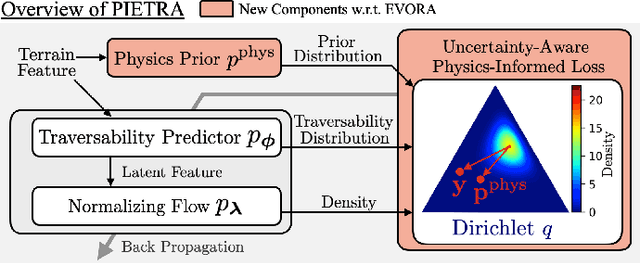
Self-supervised learning is a powerful approach for developing traversability models for off-road navigation, but these models often struggle with inputs unseen during training. Existing methods utilize techniques like evidential deep learning to quantify model uncertainty, helping to identify and avoid out-of-distribution terrain. However, always avoiding out-of-distribution terrain can be overly conservative, e.g., when novel terrain can be effectively analyzed using a physics-based model. To overcome this challenge, we introduce Physics-Informed Evidential Traversability (PIETRA), a self-supervised learning framework that integrates physics priors directly into the mathematical formulation of evidential neural networks and introduces physics knowledge implicitly through an uncertainty-aware, physics-informed training loss. Our evidential network seamlessly transitions between learned and physics-based predictions for out-of-distribution inputs. Additionally, the physics-informed loss regularizes the learned model, ensuring better alignment with the physics model. Extensive simulations and hardware experiments demonstrate that PIETRA improves both learning accuracy and navigation performance in environments with significant distribution shifts.
Terrain-Attentive Learning for Efficient 6-DoF Kinodynamic Modeling on Vertically Challenging Terrain
Mar 25, 2024



Wheeled robots have recently demonstrated superior mechanical capability to traverse vertically challenging terrain (e.g., extremely rugged boulders comparable in size to the vehicles themselves). Negotiating such terrain introduces significant variations of vehicle pose in all six Degrees-of-Freedom (DoFs), leading to imbalanced contact forces, varying momentum, and chassis deformation due to non-rigid tires and suspensions. To autonomously navigate on vertically challenging terrain, all these factors need to be efficiently reasoned within limited onboard computation and strict real-time constraints. In this paper, we propose a 6-DoF kinodynamics learning approach that is attentive only to the specific underlying terrain critical to the current vehicle-terrain interaction, so that it can be efficiently queried in real-time motion planners onboard small robots. Physical experiment results show our Terrain-Attentive Learning demonstrates on average 51.1% reduction in model prediction error among all 6 DoFs compared to a state-of-the-art model for vertically challenging terrain.
Learning to Model and Plan for Wheeled Mobility on Vertically Challenging Terrain
Jun 20, 2023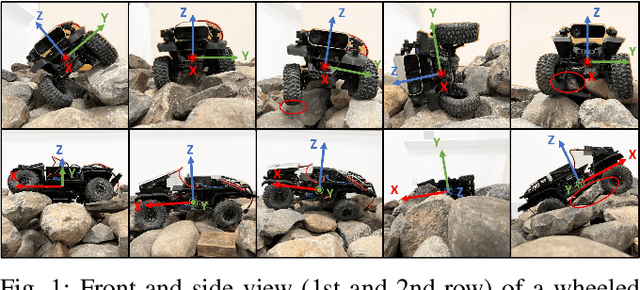
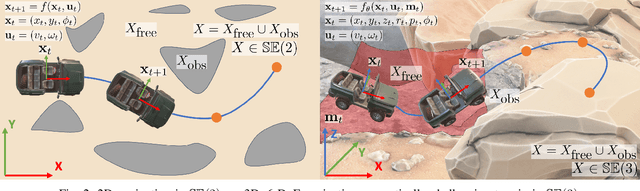
Most autonomous navigation systems assume wheeled robots are rigid bodies and their 2D planar workspaces can be divided into free spaces and obstacles. However, recent wheeled mobility research, showing that wheeled platforms have the potential of moving over vertically challenging terrain (e.g., rocky outcroppings, rugged boulders, and fallen tree trunks), invalidate both assumptions. Navigating off-road vehicle chassis with long suspension travel and low tire pressure in places where the boundary between obstacles and free spaces is blurry requires precise 3D modeling of the interaction between the chassis and the terrain, which is complicated by suspension and tire deformation, varying tire-terrain friction, vehicle weight distribution and momentum, etc. In this paper, we present a learning approach to model wheeled mobility, i.e., in terms of vehicle-terrain forward dynamics, and plan feasible, stable, and efficient motion to drive over vertically challenging terrain without rolling over or getting stuck. We present physical experiments on two wheeled robots and show that planning using our learned model can achieve up to 60% improvement in navigation success rate and 46% reduction in unstable chassis roll and pitch angles.
Toward Wheeled Mobility on Vertically Challenging Terrain: Platforms, Datasets, and Algorithms
Mar 02, 2023
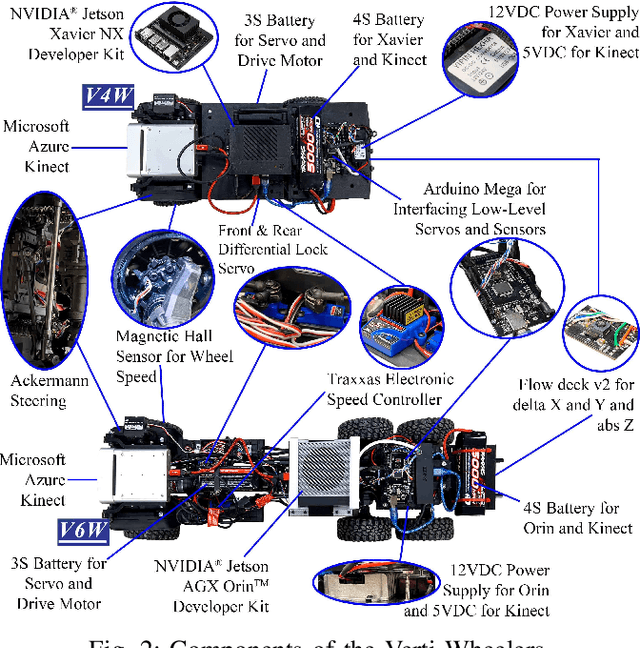
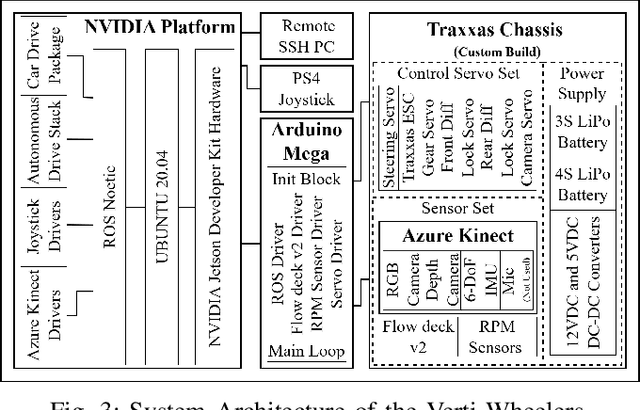
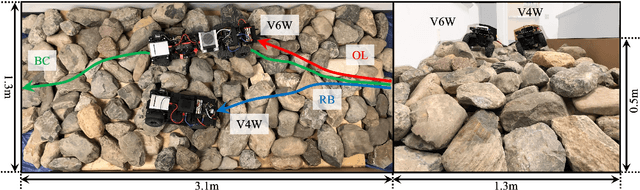
Most conventional wheeled robots can only move in flat environments and simply divide their planar workspaces into free spaces and obstacles. Deeming obstacles as non-traversable significantly limits wheeled robots' mobility in real-world, non-flat, off-road environments, where part of the terrain (e.g., steep slopes, rugged boulders) will be treated as non-traversable obstacles. To improve wheeled mobility in those non-flat environments with vertically challenging terrain, we present two wheeled platforms with little hardware modification compared to conventional wheeled robots; we collect datasets of our wheeled robots crawling over previously non-traversable, vertically challenging terrain to facilitate data-driven mobility; we also present algorithms and their experimental results to show that conventional wheeled robots have previously unrealized potential of moving through vertically challenging terrain. We make our platforms, datasets, and algorithms publicly available to facilitate future research on wheeled mobility.