 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeM2P2: A Multi-Modal Passive Perception Dataset for Off-Road Mobility in Extreme Low-Light Conditions
Paper and Code
Oct 01, 2024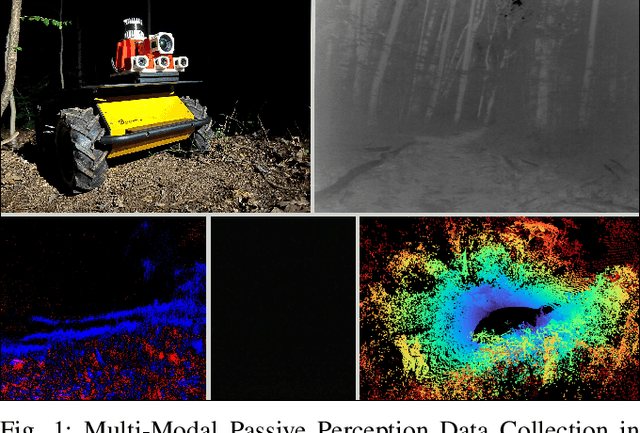
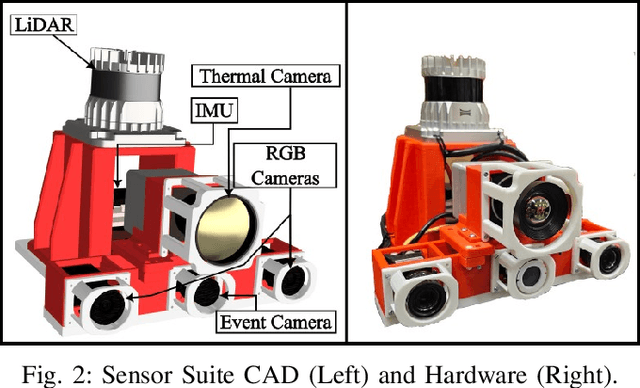
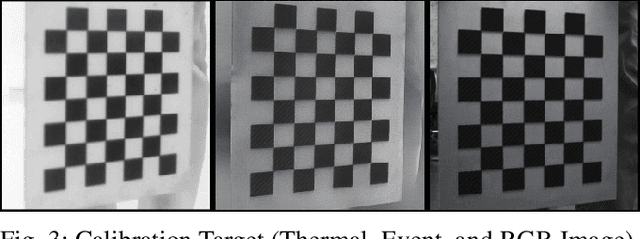
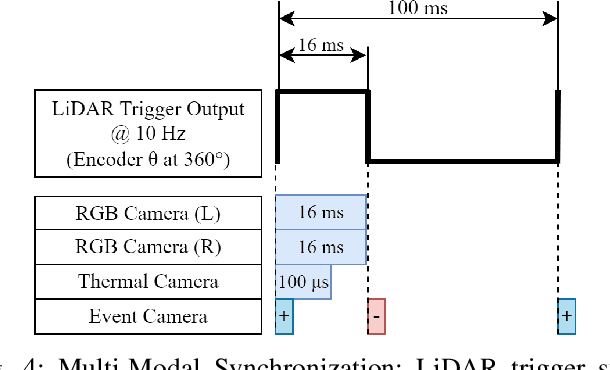
Long-duration, off-road, autonomous missions require robots to continuously perceive their surroundings regardless of the ambient lighting conditions. Most existing autonomy systems heavily rely on active sensing, e.g., LiDAR, RADAR, and Time-of-Flight sensors, or use (stereo) visible light imaging sensors, e.g., color cameras, to perceive environment geometry and semantics. In scenarios where fully passive perception is required and lighting conditions are degraded to an extent that visible light cameras fail to perceive, most downstream mobility tasks such as obstacle avoidance become impossible. To address such a challenge, this paper presents a Multi-Modal Passive Perception dataset, M2P2, to enable off-road mobility in low-light to no-light conditions. We design a multi-modal sensor suite including thermal, event, and stereo RGB cameras, GPS, two Inertia Measurement Units (IMUs), as well as a high-resolution LiDAR for ground truth, with a novel multi-sensor calibration procedure that can efficiently transform multi-modal perceptual streams into a common coordinate system. Our 10-hour, 32 km dataset also includes mobility data such as robot odometry and actions and covers well-lit, low-light, and no-light conditions, along with paved, on-trail, and off-trail terrain. Our results demonstrate that off-road mobility is possible through only passive perception in extreme low-light conditions using end-to-end learning and classical planning. The project website can be found at https://cs.gmu.edu/~xiao/Research/M2P2/