 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeZero-Shot Adaptation to Robot Structural Damage via Natural Language-Informed Kinodynamics Modeling
Feb 12, 2026High-performance autonomous mobile robots endure significant mechanical stress during in-the-wild operations, e.g., driving at high speeds or over rugged terrain. Although these platforms are engineered to withstand such conditions, mechanical degradation is inevitable. Structural damage manifests as consistent and notable changes in kinodynamic behavior compared to a healthy vehicle. Given the heterogeneous nature of structural failures, quantifying various damages to inform kinodynamics is challenging. We posit that natural language can describe and thus capture this variety of damages. Therefore, we propose Zero-shot Language Informed Kinodynamics (ZLIK), which employs self-supervised learning to ground semantic information of damage descriptions in kinodynamic behaviors to learn a forward kinodynamics model in a data-driven manner. Using the high-fidelity soft-body physics simulator BeamNG.tech, we collect data from a variety of structurally compromised vehicles. Our learned model achieves zero-shot adaptation to different damages with up to 81% reduction in kinodynamics error and generalizes across the sim-to-real and full-to-1/10$^{\text{th}}$ scale gaps.
Verti-Arena: A Controllable and Standardized Indoor Testbed for Multi-Terrain Off-Road Autonomy
Aug 11, 2025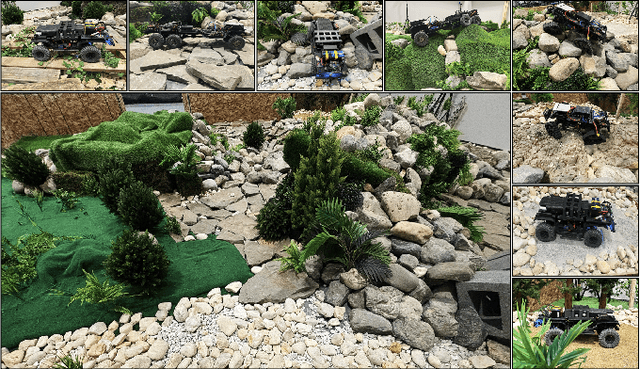
Off-road navigation is an important capability for mobile robots deployed in environments that are inaccessible or dangerous to humans, such as disaster response or planetary exploration. Progress is limited due to the lack of a controllable and standardized real-world testbed for systematic data collection and validation. To fill this gap, we introduce Verti-Arena, a reconfigurable indoor facility designed specifically for off-road autonomy. By providing a repeatable benchmark environment, Verti-Arena supports reproducible experiments across a variety of vertically challenging terrains and provides precise ground truth measurements through onboard sensors and a motion capture system. Verti-Arena also supports consistent data collection and comparative evaluation of algorithms in off-road autonomy research. We also develop a web-based interface that enables research groups worldwide to remotely conduct standardized off-road autonomy experiments on Verti-Arena.
Dom, cars don't fly! -- Or do they? In-Air Vehicle Maneuver for High-Speed Off-Road Navigation
Mar 24, 2025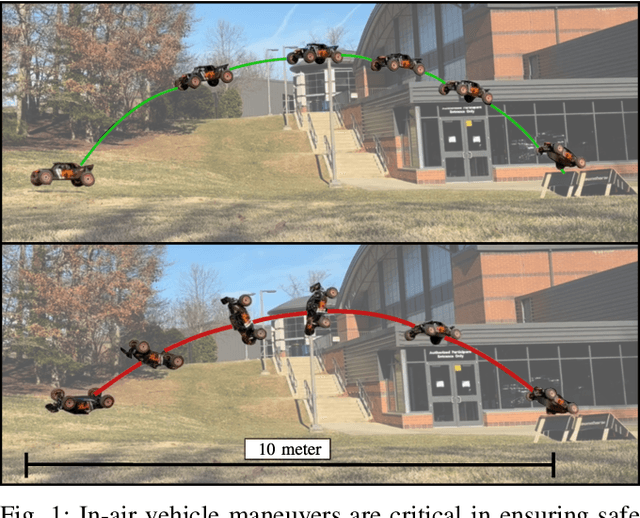
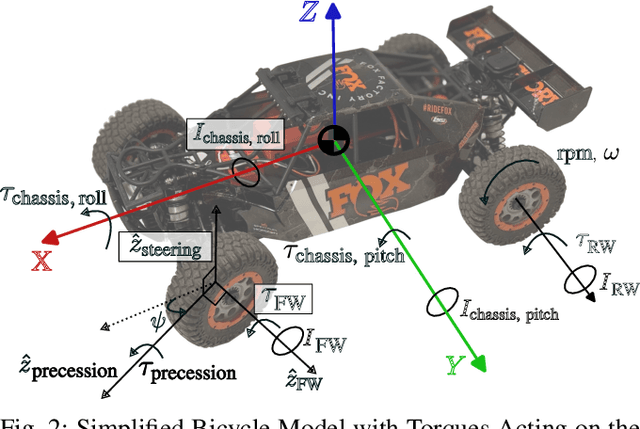
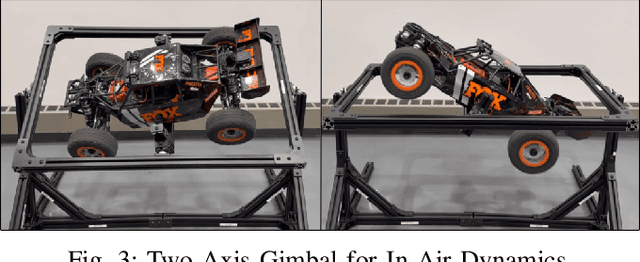
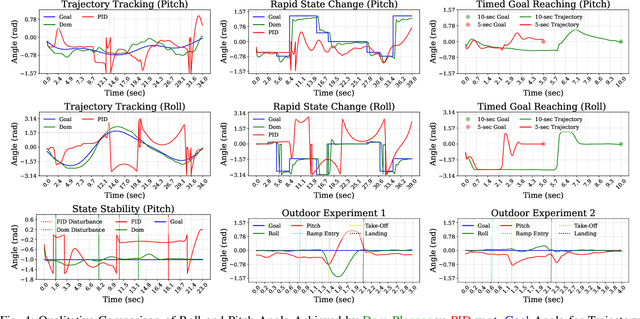
When pushing the speed limit for aggressive off-road navigation on uneven terrain, it is inevitable that vehicles may become airborne from time to time. During time-sensitive tasks, being able to fly over challenging terrain can also save time, instead of cautiously circumventing or slowly negotiating through. However, most off-road autonomy systems operate under the assumption that the vehicles are always on the ground and therefore limit operational speed. In this paper, we present a novel approach for in-air vehicle maneuver during high-speed off-road navigation. Based on a hybrid forward kinodynamic model using both physics principles and machine learning, our fixed-horizon, sampling-based motion planner ensures accurate vehicle landing poses and their derivatives within a short airborne time window using vehicle throttle and steering commands. We test our approach in extensive in-air experiments both indoors and outdoors, compare it against an error-driven control method, and demonstrate that precise and timely in-air vehicle maneuver is possible through existing ground vehicle controls.
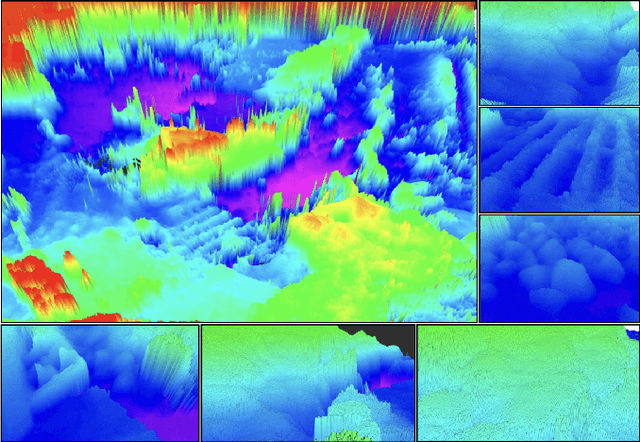
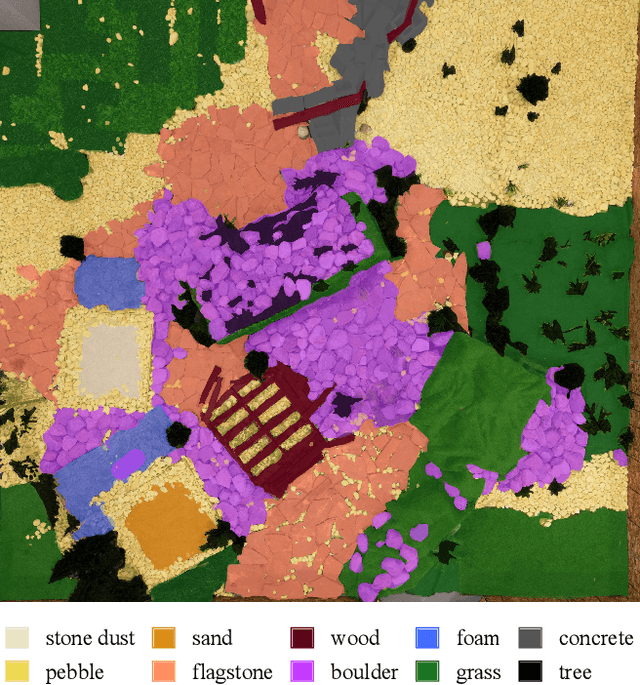
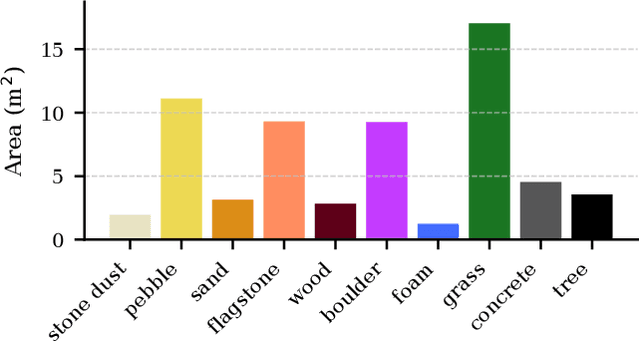
Verti-Bench: A General and Scalable Off-Road Mobility Benchmark for Vertically Challenging Terrain
Feb 17, 2025



Recent advancement in off-road autonomy has shown promises in deploying autonomous mobile robots in outdoor off-road environments. Encouraging results have been reported from both simulated and real-world experiments. However, unlike evaluating off-road perception tasks on static datasets, benchmarking off-road mobility still faces significant challenges due to a variety of factors, including variations in vehicle platforms and terrain properties. Furthermore, different vehicle-terrain interactions need to be unfolded during mobility evaluation, which requires the mobility systems to interact with the environments instead of comparing against a pre-collected dataset. In this paper, we present Verti-Bench, a mobility benchmark that focuses on extremely rugged, vertically challenging off-road environments. 100 unique off-road environments and 1000 distinct navigation tasks with millions of off-road terrain properties, including a variety of geometry and semantics, rigid and deformable surfaces, and large natural obstacles, provide standardized and objective evaluation in high-fidelity multi-physics simulation. Verti-Bench is also scalable to various vehicle platforms with different scales and actuation mechanisms. We also provide datasets from expert demonstration, random exploration, failure cases (rolling over and getting stuck), as well as a gym-like interface for reinforcement learning. We use Verti-Bench to benchmark ten off-road mobility systems, present our findings, and identify future off-road mobility research directions.
M2P2: A Multi-Modal Passive Perception Dataset for Off-Road Mobility in Extreme Low-Light Conditions
Oct 01, 2024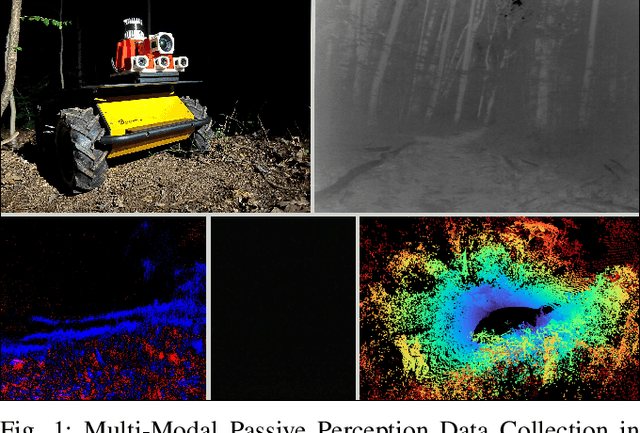
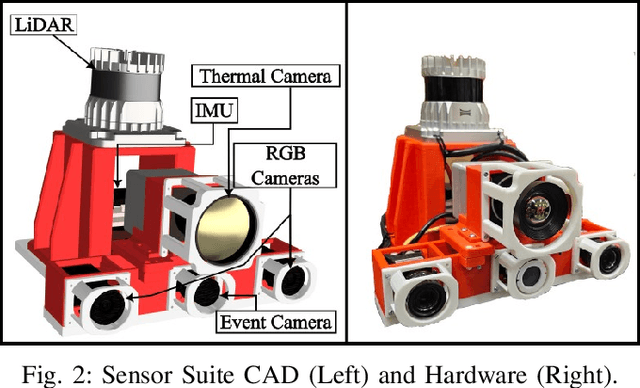
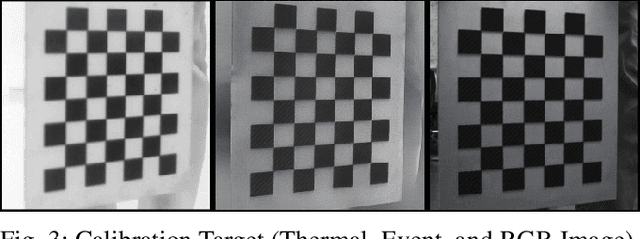
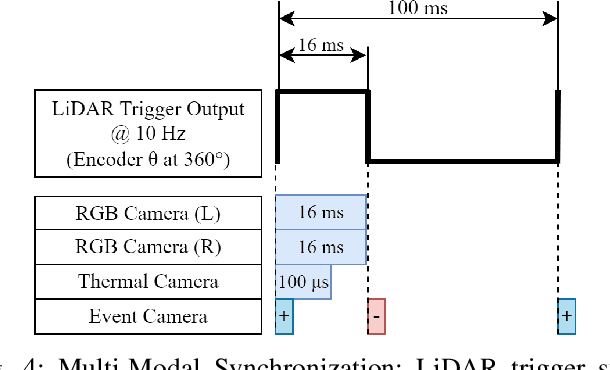
Long-duration, off-road, autonomous missions require robots to continuously perceive their surroundings regardless of the ambient lighting conditions. Most existing autonomy systems heavily rely on active sensing, e.g., LiDAR, RADAR, and Time-of-Flight sensors, or use (stereo) visible light imaging sensors, e.g., color cameras, to perceive environment geometry and semantics. In scenarios where fully passive perception is required and lighting conditions are degraded to an extent that visible light cameras fail to perceive, most downstream mobility tasks such as obstacle avoidance become impossible. To address such a challenge, this paper presents a Multi-Modal Passive Perception dataset, M2P2, to enable off-road mobility in low-light to no-light conditions. We design a multi-modal sensor suite including thermal, event, and stereo RGB cameras, GPS, two Inertia Measurement Units (IMUs), as well as a high-resolution LiDAR for ground truth, with a novel multi-sensor calibration procedure that can efficiently transform multi-modal perceptual streams into a common coordinate system. Our 10-hour, 32 km dataset also includes mobility data such as robot odometry and actions and covers well-lit, low-light, and no-light conditions, along with paved, on-trail, and off-trail terrain. Our results demonstrate that off-road mobility is possible through only passive perception in extreme low-light conditions using end-to-end learning and classical planning. The project website can be found at https://cs.gmu.edu/~xiao/Research/M2P2/
Traverse the Non-Traversable: Estimating Traversability for Wheeled Mobility on Vertically Challenging Terrain
Sep 26, 2024



Most traversability estimation techniques divide off-road terrain into traversable (e.g., pavement, gravel, and grass) and non-traversable (e.g., boulders, vegetation, and ditches) regions and then inform subsequent planners to produce trajectories on the traversable part. However, recent research demonstrated that wheeled robots can traverse vertically challenging terrain (e.g., extremely rugged boulders comparable in size to the vehicles themselves), which unfortunately would be deemed as non-traversable by existing techniques. Motivated by such limitations, this work aims at identifying the traversable from the seemingly non-traversable, vertically challenging terrain based on past kinodynamic vehicle-terrain interactions in a data-driven manner. Our new Traverse the Non-Traversable(TNT) traversability estimator can efficiently guide a down-stream sampling-based planner containing a high-precision 6-DoF kinodynamic model, which becomes deployable onboard a small-scale vehicle. Additionally, the estimated traversability can also be used as a costmap to plan global and local paths without sampling. Our experiment results show that TNT can improve planning performance, efficiency, and stability by 50%, 26.7%, and 9.2% respectively on a physical robot platform.
VertiEncoder: Self-Supervised Kinodynamic Representation Learning on Vertically Challenging Terrain
Sep 17, 2024



We present VertiEncoder, a self-supervised representation learning approach for robot mobility on vertically challenging terrain. Using the same pre-training process, VertiEncoder can handle four different downstream tasks, including forward kinodynamics learning, inverse kinodynamics learning, behavior cloning, and patch reconstruction with a single representation. VertiEncoder uses a TransformerEncoder to learn the local context of its surroundings by random masking and next patch reconstruction. We show that VertiEncoder achieves better performance across all four different tasks compared to specialized End-to-End models with 77% fewer parameters. We also show VertiEncoder's comparable performance against state-of-the-art kinodynamic modeling and planning approaches in real-world robot deployment. These results underscore the efficacy of VertiEncoder in mitigating overfitting and fostering more robust generalization across diverse environmental contexts and downstream vehicle kinodynamic tasks.
PIETRA: Physics-Informed Evidential Learning for Traversing Out-of-Distribution Terrain
Sep 04, 2024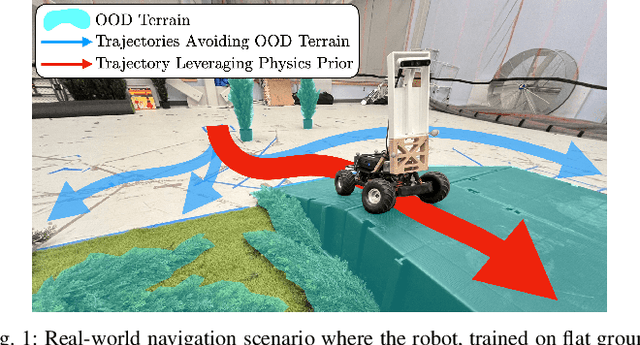
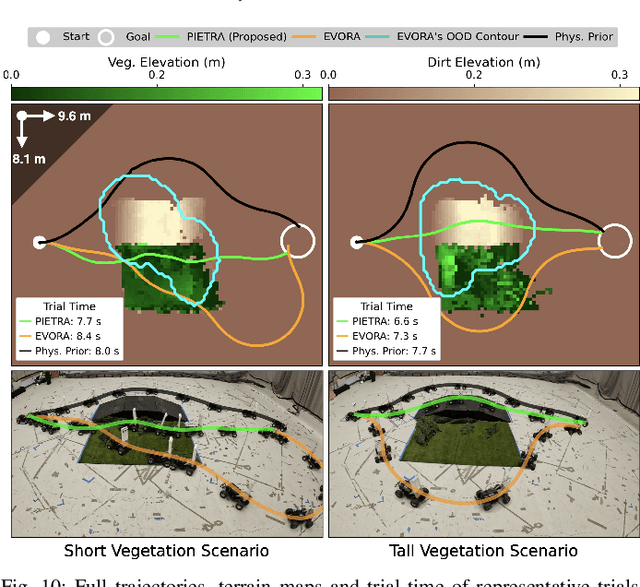
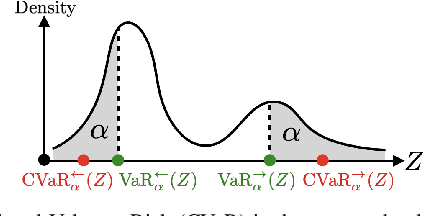
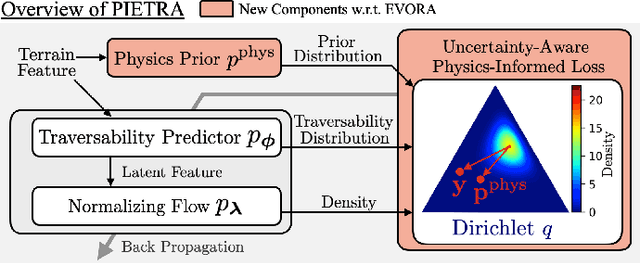
Self-supervised learning is a powerful approach for developing traversability models for off-road navigation, but these models often struggle with inputs unseen during training. Existing methods utilize techniques like evidential deep learning to quantify model uncertainty, helping to identify and avoid out-of-distribution terrain. However, always avoiding out-of-distribution terrain can be overly conservative, e.g., when novel terrain can be effectively analyzed using a physics-based model. To overcome this challenge, we introduce Physics-Informed Evidential Traversability (PIETRA), a self-supervised learning framework that integrates physics priors directly into the mathematical formulation of evidential neural networks and introduces physics knowledge implicitly through an uncertainty-aware, physics-informed training loss. Our evidential network seamlessly transitions between learned and physics-based predictions for out-of-distribution inputs. Additionally, the physics-informed loss regularizes the learned model, ensuring better alignment with the physics model. Extensive simulations and hardware experiments demonstrate that PIETRA improves both learning accuracy and navigation performance in environments with significant distribution shifts.
Terrain-Attentive Learning for Efficient 6-DoF Kinodynamic Modeling on Vertically Challenging Terrain
Mar 25, 2024



Wheeled robots have recently demonstrated superior mechanical capability to traverse vertically challenging terrain (e.g., extremely rugged boulders comparable in size to the vehicles themselves). Negotiating such terrain introduces significant variations of vehicle pose in all six Degrees-of-Freedom (DoFs), leading to imbalanced contact forces, varying momentum, and chassis deformation due to non-rigid tires and suspensions. To autonomously navigate on vertically challenging terrain, all these factors need to be efficiently reasoned within limited onboard computation and strict real-time constraints. In this paper, we propose a 6-DoF kinodynamics learning approach that is attentive only to the specific underlying terrain critical to the current vehicle-terrain interaction, so that it can be efficiently queried in real-time motion planners onboard small robots. Physical experiment results show our Terrain-Attentive Learning demonstrates on average 51.1% reduction in model prediction error among all 6 DoFs compared to a state-of-the-art model for vertically challenging terrain.
CAHSOR: Competence-Aware High-Speed Off-Road Ground Navigation in SE
Feb 10, 2024



While the workspace of traditional ground vehicles is usually assumed to be in a 2D plane, i.e., SE(2), such an assumption may not hold when they drive at high speeds on unstructured off-road terrain: High-speed sharp turns on high-friction surfaces may lead to vehicle rollover; Turning aggressively on loose gravel or grass may violate the non-holonomic constraint and cause significant lateral sliding; Driving quickly on rugged terrain will produce extensive vibration along the vertical axis. Therefore, most offroad vehicles are currently limited to drive only at low speeds to assure vehicle stability and safety. In this work, we aim at empowering high-speed off-road vehicles with competence awareness in SE(3) so that they can reason about the consequences of taking aggressive maneuvers on different terrain with a 6-DoF forward kinodynamic model. The model is learned from visual and inertial Terrain Representation for Off-road Navigation (TRON) using multimodal, self-supervised vehicle-terrain interactions. We demonstrate the efficacy of our Competence-Aware High-Speed Off-Road (CAHSOR) navigation approach on a physical ground robot in both an autonomous navigation and a human shared-control setup and show that CAHSOR can efficiently reduce vehicle instability by 62% while only compromising 8.6% average speed with the help of TRON.