 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeToward Human-Like Social Robot Navigation: A Large-Scale, Multi-Modal, Social Human Navigation Dataset
Paper and Code

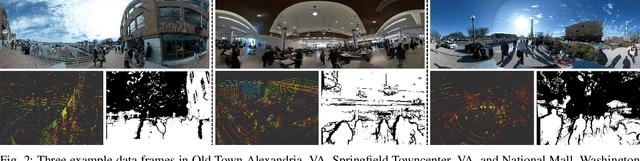
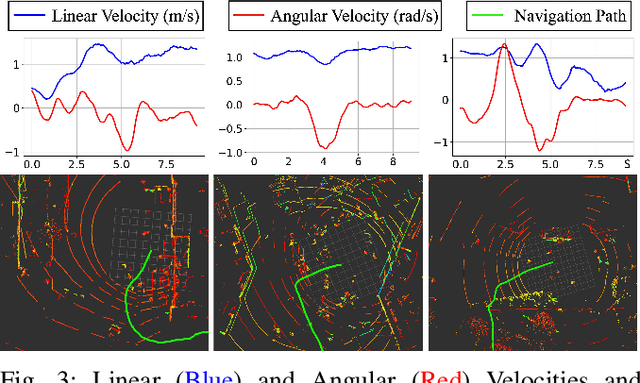
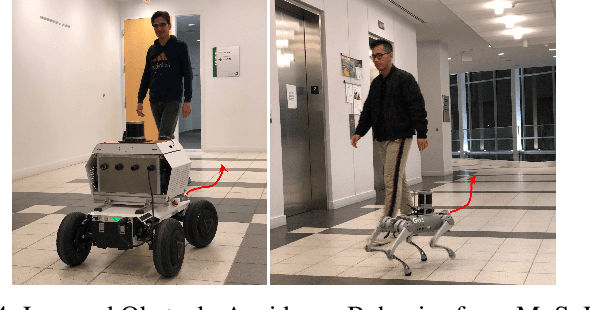
Humans are well-adept at navigating public spaces shared with others, where current autonomous mobile robots still struggle: while safely and efficiently reaching their goals, humans communicate their intentions and conform to unwritten social norms on a daily basis; conversely, robots become clumsy in those daily social scenarios, getting stuck in dense crowds, surprising nearby pedestrians, or even causing collisions. While recent research on robot learning has shown promises in data-driven social robot navigation, good-quality training data is still difficult to acquire through either trial and error or expert demonstrations. In this work, we propose to utilize the body of rich, widely available, social human navigation data in many natural human-inhabited public spaces for robots to learn similar, human-like, socially compliant navigation behaviors. To be specific, we design an open-source egocentric data collection sensor suite wearable by walking humans to provide multi-modal robot perception data; we collect a large-scale (~50 km, 10 hours, 150 trials, 7 humans) dataset in a variety of public spaces which contain numerous natural social navigation interactions; we analyze our dataset, demonstrate its usability, and point out future research directions and use cases.