 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCORAL: COntextual Reasoning And Local Planning in A Hierarchical VLM Framework for Underwater Monitoring
Mar 16, 2026Oyster reefs are critical ecosystem species that sustain biodiversity, filter water, and protect coastlines, yet they continue to decline globally. Restoring these ecosystems requires regular underwater monitoring to assess reef health, a task that remains costly, hazardous, and limited when performed by human divers. Autonomous underwater vehicles (AUVs) offer a promising alternative, but existing AUVs rely on geometry-based navigation that cannot interpret scene semantics. Recent vision-language models (VLMs) enable semantic reasoning for intelligent exploration, but existing VLM-driven systems adopt an end-to-end paradigm, introducing three key limitations. First, these systems require the VLM to generate every navigation decision, forcing frequent waits for inference. Second, VLMs cannot model robot dynamics, causing collisions in cluttered environments. Third, limited self-correction allows small deviations to accumulate into large path errors. To address these limitations, we propose CORAL, a framework that decouples high-level semantic reasoning from low-level reactive control. The VLM provides high-level exploration guidance by selecting waypoints, while a dynamics-based planner handles low-level collision-free execution. A geometric verification module validates waypoints and triggers replanning when needed. Compared with the previous state-of-the-art, CORAL improves coverage by 14.28% percentage points, or 17.85% relatively, reduces collisions by 100%, and requires 57% fewer VLM calls.
APPLV: Adaptive Planner Parameter Learning from Vision-Language-Action Model
Mar 09, 2026Autonomous navigation in highly constrained environments remains challenging for mobile robots. Classical navigation approaches offer safety assurances but require environment-specific parameter tuning; end-to-end learning bypasses parameter tuning but struggles with precise control in constrained spaces. To this end, recent robot learning approaches automate parameter tuning while retaining classical systems' safety, yet still face challenges in generalizing to unseen environments. Recently, Vision-Language-Action (VLA) models have shown promise by leveraging foundation models' scene understanding capabilities, but still struggle with precise control and inference latency in navigation tasks. In this paper, we propose Adaptive Planner Parameter Learning from Vision-Language-Action Model (\textsc{applv}). Unlike traditional VLA models that directly output actions, \textsc{applv} leverages pre-trained vision-language models with a regression head to predict planner parameters that configure classical planners. We develop two training strategies: supervised learning fine-tuning from collected navigation trajectories and reinforcement learning fine-tuning to further optimize navigation performance. We evaluate \textsc{applv} across multiple motion planners on the simulated Benchmark Autonomous Robot Navigation (BARN) dataset and in physical robot experiments. Results demonstrate that \textsc{applv} outperforms existing methods in both navigation performance and generalization to unseen environments.
Combining Machine Learning and Sampling-Based Search for Multi-Goal Motion Planning with Dynamics
Mar 26, 2025



This paper considers multi-goal motion planning in unstructured, obstacle-rich environments where a robot is required to reach multiple regions while avoiding collisions. The planned motions must also satisfy the differential constraints imposed by the robot dynamics. To find solutions efficiently, this paper leverages machine learning, Traveling Salesman Problem (TSP), and sampling-based motion planning. The approach expands a motion tree by adding collision-free and dynamically-feasible trajectories as branches. A TSP solver is used to compute a tour for each node to determine the order in which to reach the remaining goals by utilizing a cost matrix. An important aspect of the approach is that it leverages machine learning to construct the cost matrix by combining runtime and distance predictions to single-goal motion-planning problems. During the motion-tree expansion, priority is given to nodes associated with low-cost tours. Experiments with a vehicle model operating in obstacle-rich environments demonstrate the computational efficiency and scalability of the approach.
Decremental Dynamics Planning for Robot Navigation
Mar 26, 2025



Most, if not all, robot navigation systems employ a decomposed planning framework that includes global and local planning. To trade-off onboard computation and plan quality, current systems have to limit all robot dynamics considerations only within the local planner, while leveraging an extremely simplified robot representation (e.g., a point-mass holonomic model without dynamics) in the global level. However, such an artificial decomposition based on either full or zero consideration of robot dynamics can lead to gaps between the two levels, e.g., a global path based on a holonomic point-mass model may not be realizable by a non-holonomic robot, especially in highly constrained obstacle environments. Motivated by such a limitation, we propose a novel paradigm, Decremental Dynamics Planning that integrates dynamic constraints into the entire planning process, with a focus on high-fidelity dynamics modeling at the beginning and a gradual fidelity reduction as the planning progresses. To validate the effectiveness of this paradigm, we augment three different planners with DDP and show overall improved planning performance. We also develop a new DDP-based navigation system, which achieves first place in the simulation phase of the 2025 BARN Challenge. Both simulated and physical experiments validate DDP's hypothesized benefits.
Reward Training Wheels: Adaptive Auxiliary Rewards for Robotics Reinforcement Learning
Mar 19, 2025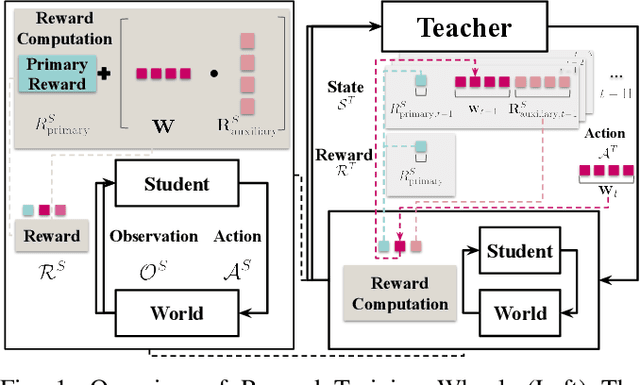
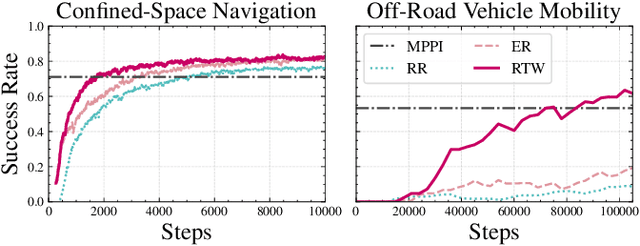
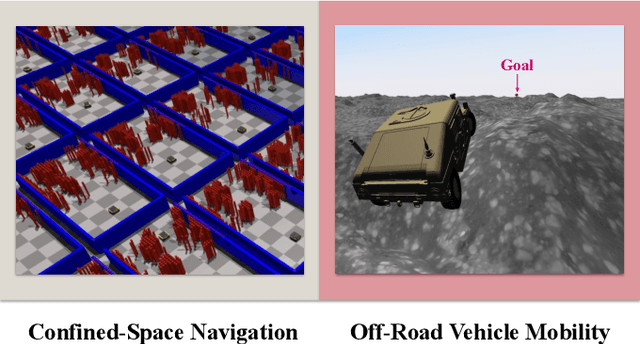
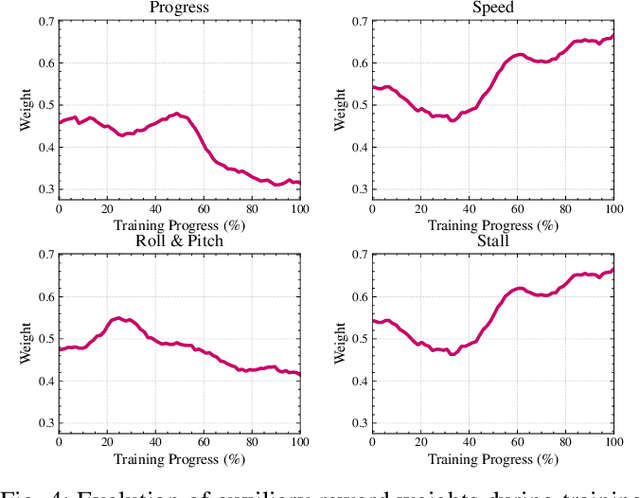
Robotics Reinforcement Learning (RL) often relies on carefully engineered auxiliary rewards to supplement sparse primary learning objectives to compensate for the lack of large-scale, real-world, trial-and-error data. While these auxiliary rewards accelerate learning, they require significant engineering effort, may introduce human biases, and cannot adapt to the robot's evolving capabilities during training. In this paper, we introduce Reward Training Wheels (RTW), a teacher-student framework that automates auxiliary reward adaptation for robotics RL. To be specific, the RTW teacher dynamically adjusts auxiliary reward weights based on the student's evolving capabilities to determine which auxiliary reward aspects require more or less emphasis to improve the primary objective. We demonstrate RTW on two challenging robot tasks: navigation in highly constrained spaces and off-road vehicle mobility on vertically challenging terrain. In simulation, RTW outperforms expert-designed rewards by 2.35% in navigation success rate and improves off-road mobility performance by 122.62%, while achieving 35% and 3X faster training efficiency, respectively. Physical robot experiments further validate RTW's effectiveness, achieving a perfect success rate (5/5 trials vs. 2/5 for expert-designed rewards) and improving vehicle stability with up to 47.4% reduction in orientation angles.
Verti-Bench: A General and Scalable Off-Road Mobility Benchmark for Vertically Challenging Terrain
Feb 17, 2025



Recent advancement in off-road autonomy has shown promises in deploying autonomous mobile robots in outdoor off-road environments. Encouraging results have been reported from both simulated and real-world experiments. However, unlike evaluating off-road perception tasks on static datasets, benchmarking off-road mobility still faces significant challenges due to a variety of factors, including variations in vehicle platforms and terrain properties. Furthermore, different vehicle-terrain interactions need to be unfolded during mobility evaluation, which requires the mobility systems to interact with the environments instead of comparing against a pre-collected dataset. In this paper, we present Verti-Bench, a mobility benchmark that focuses on extremely rugged, vertically challenging off-road environments. 100 unique off-road environments and 1000 distinct navigation tasks with millions of off-road terrain properties, including a variety of geometry and semantics, rigid and deformable surfaces, and large natural obstacles, provide standardized and objective evaluation in high-fidelity multi-physics simulation. Verti-Bench is also scalable to various vehicle platforms with different scales and actuation mechanisms. We also provide datasets from expert demonstration, random exploration, failure cases (rolling over and getting stuck), as well as a gym-like interface for reinforcement learning. We use Verti-Bench to benchmark ten off-road mobility systems, present our findings, and identify future off-road mobility research directions.
Multi-Goal Motion Memory
Jul 16, 2024Autonomous mobile robots (e.g., warehouse logistics robots) often need to traverse complex, obstacle-rich, and changing environments to reach multiple fixed goals (e.g., warehouse shelves). Traditional motion planners need to calculate the entire multi-goal path from scratch in response to changes in the environment, which result in a large consumption of computing resources. This process is not only time-consuming but also may not meet real-time requirements in application scenarios that require rapid response to environmental changes. In this paper, we provide a novel Multi-Goal Motion Memory technique that allows robots to use previous planning experiences to accelerate future multi-goal planning in changing environments. Specifically, our technique predicts collision-free and dynamically-feasible trajectories and distances between goal pairs to guide the sampling process to build a roadmap, to inform a Traveling Salesman Problem (TSP) solver to compute a tour, and to efficiently produce motion plans. Experiments conducted with a vehicle and a snake-like robot in obstacle-rich environments show that the proposed Motion Memory technique can substantially accelerate planning speed by up to 90\%. Furthermore, the solution quality is comparable to state-of-the-art algorithms and even better in some environments.
Accounting for Work Zone Disruptions in Traffic Flow Forecasting
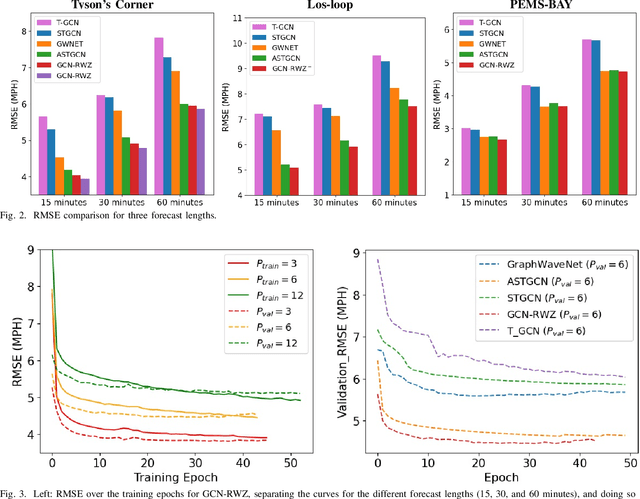
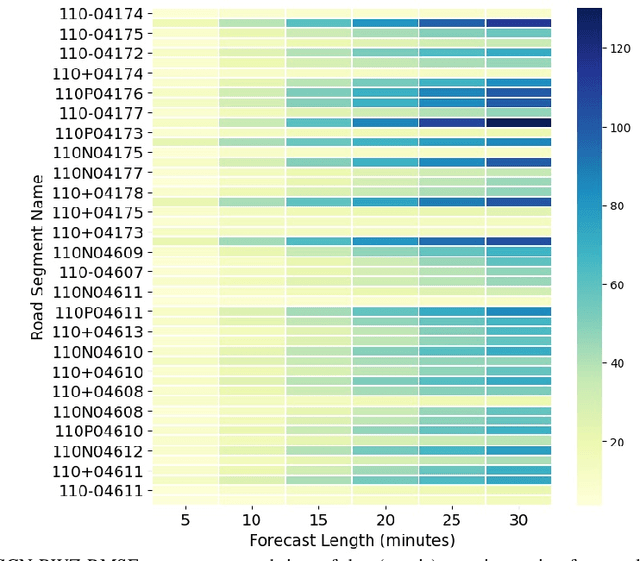
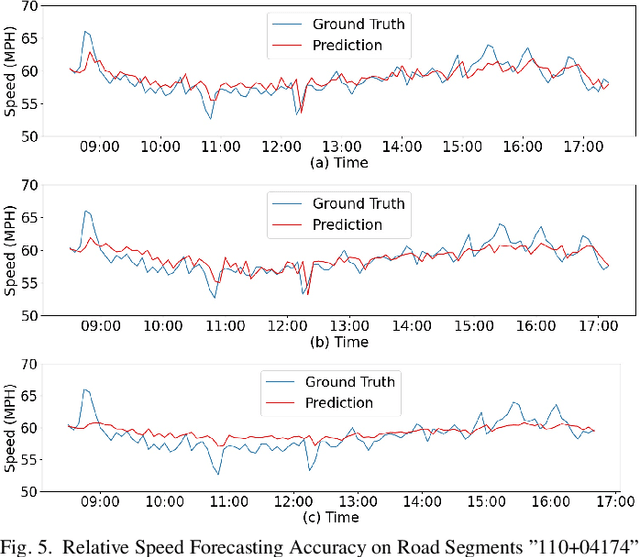
Jul 16, 2024Traffic speed forecasting is an important task in intelligent transportation system management. The objective of much of the current computational research is to minimize the difference between predicted and actual speeds, but information modalities other than speed priors are largely not taken into account. In particular, though state of the art performance is achieved on speed forecasting with graph neural network methods, these methods do not incorporate information on roadway maintenance work zones and their impacts on predicted traffic flows; yet, the impacts of construction work zones are of significant interest to roadway management agencies, because they translate to impacts on the local economy and public well-being. In this paper, we build over the convolutional graph neural network architecture and present a novel ``Graph Convolutional Network for Roadway Work Zones" model that includes a novel data fusion mechanism and a new heterogeneous graph aggregation methodology to accommodate work zone information in spatio-temporal dependencies among traffic states. The model is evaluated on two data sets that capture traffic flows in the presence of work zones in the Commonwealth of Virginia. Extensive comparative evaluation and ablation studies show that the proposed model can capture complex and nonlinear spatio-temporal relationships across a transportation corridor, outperforming baseline models, particularly when predicting traffic flow during a workzone event.
Motion Memory: Leveraging Past Experiences to Accelerate Future Motion Planning
Oct 09, 2023When facing a new motion-planning problem, most motion planners solve it from scratch, e.g., via sampling and exploration or starting optimization from a straight-line path. However, most motion planners have to experience a variety of planning problems throughout their lifetimes, which are yet to be leveraged for future planning. In this paper, we present a simple but efficient method called Motion Memory, which allows different motion planners to accelerate future planning using past experiences. Treating existing motion planners as either a closed or open box, we present a variety of ways that Motion Memory can contribute to reduce the planning time when facing a new planning problem. We provide extensive experiment results with three different motion planners on three classes of planning problems with over 30,000 problem instances and show that planning speed can be significantly reduced by up to 89% with the proposed Motion Memory technique and with increasing past planning experiences.
Traffic Flow Forecasting with Maintenance Downtime via Multi-Channel Attention-Based Spatio-Temporal Graph Convolutional Networks
Oct 04, 2021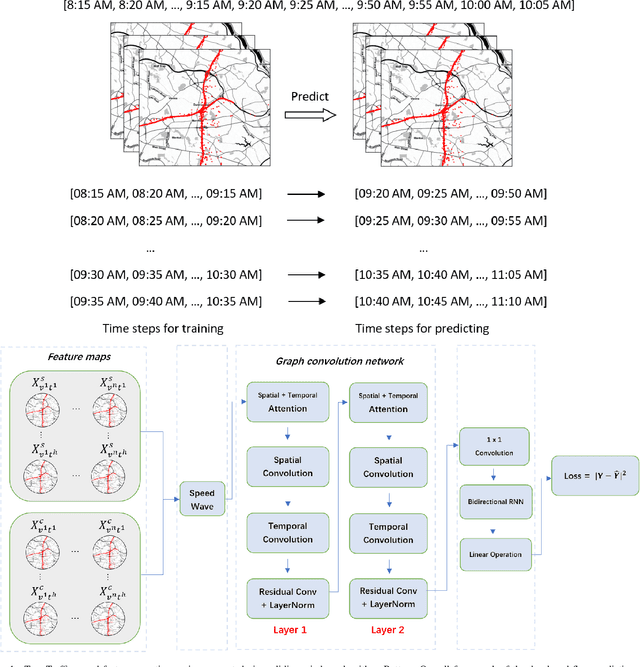
Forecasting traffic flows is a central task in intelligent transportation system management. Graph structures have shown promise as a modeling framework, with recent advances in spatio-temporal modeling via graph convolution neural networks, improving the performance or extending the prediction horizon on traffic flows. However, a key shortcoming of state-of-the-art methods is their inability to take into account information of various modalities, for instance the impact of maintenance downtime on traffic flows. This is the issue we address in this paper. Specifically, we propose a novel model to predict traffic speed under the impact of construction work. The model is based on the powerful attention-based spatio-temporal graph convolution architecture but utilizes various channels to integrate different sources of information, explicitly builds spatio-temporal dependencies among traffic states, captures the relationships between heterogeneous roadway networks, and then predicts changes in traffic flow resulting from maintenance downtime events. The model is evaluated on two benchmark datasets and a novel dataset we have collected over the bustling Tyson's corner region in Northern Virginia. Extensive comparative experiments and ablation studies show that the proposed model can capture complex and nonlinear spatio-temporal relationships across a transportation corridor, outperforming baseline models.