 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDom, cars don't fly! -- Or do they? In-Air Vehicle Maneuver for High-Speed Off-Road Navigation
Paper and Code
Mar 24, 2025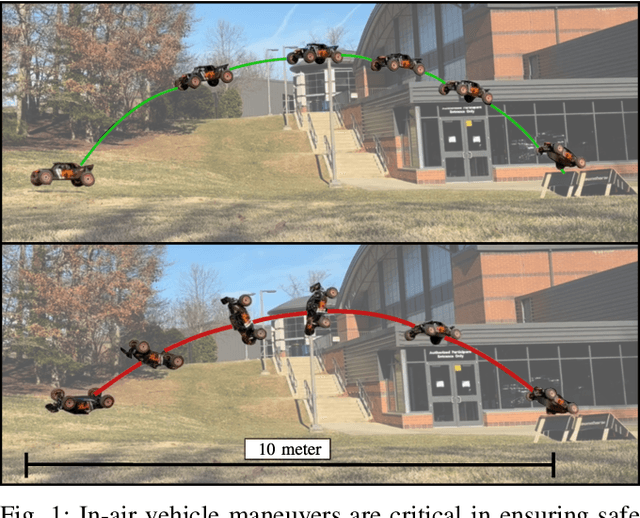
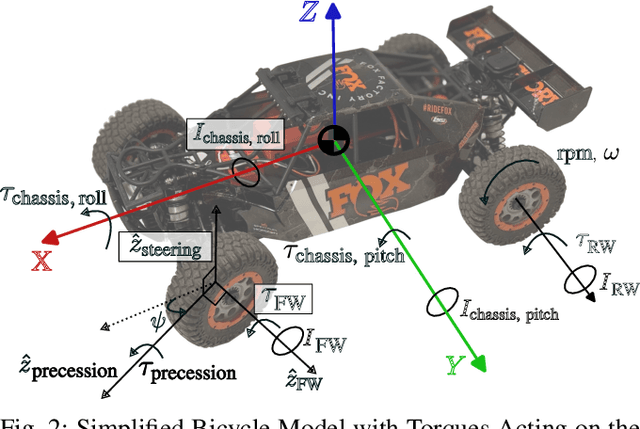
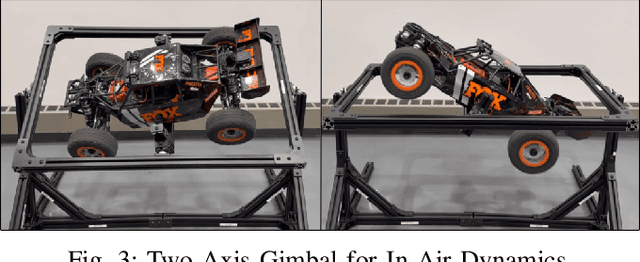
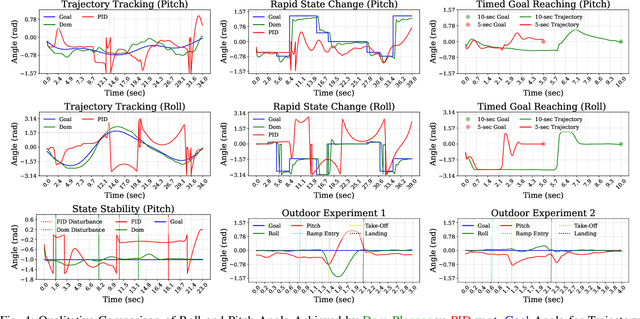
When pushing the speed limit for aggressive off-road navigation on uneven terrain, it is inevitable that vehicles may become airborne from time to time. During time-sensitive tasks, being able to fly over challenging terrain can also save time, instead of cautiously circumventing or slowly negotiating through. However, most off-road autonomy systems operate under the assumption that the vehicles are always on the ground and therefore limit operational speed. In this paper, we present a novel approach for in-air vehicle maneuver during high-speed off-road navigation. Based on a hybrid forward kinodynamic model using both physics principles and machine learning, our fixed-horizon, sampling-based motion planner ensures accurate vehicle landing poses and their derivatives within a short airborne time window using vehicle throttle and steering commands. We test our approach in extensive in-air experiments both indoors and outdoors, compare it against an error-driven control method, and demonstrate that precise and timely in-air vehicle maneuver is possible through existing ground vehicle controls.