 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeM2P2: A Multi-Modal Passive Perception Dataset for Off-Road Mobility in Extreme Low-Light Conditions
Oct 01, 2024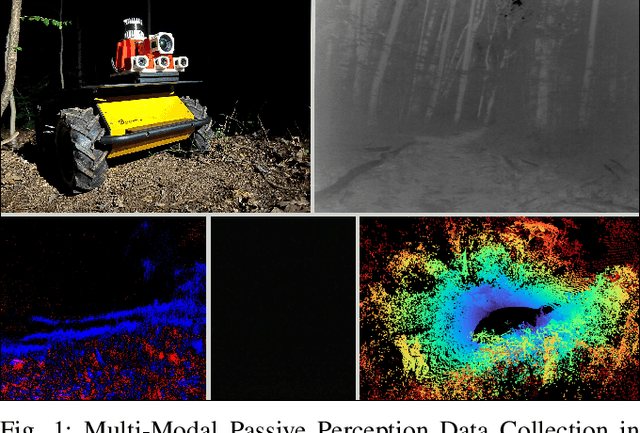
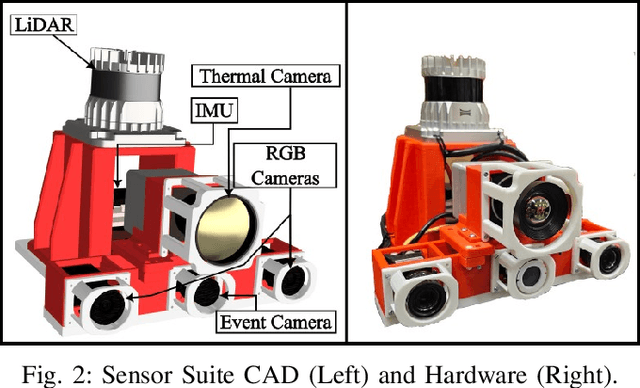
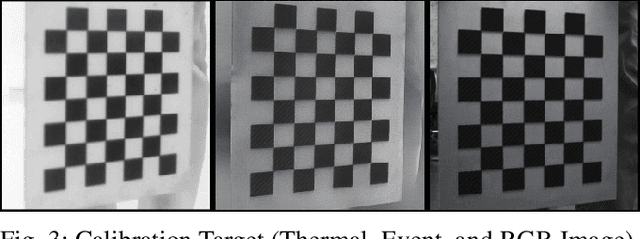
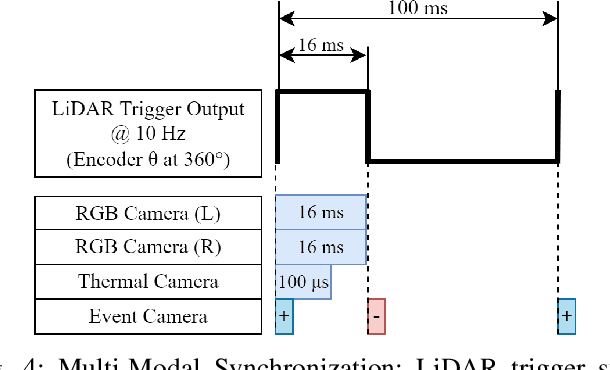
Long-duration, off-road, autonomous missions require robots to continuously perceive their surroundings regardless of the ambient lighting conditions. Most existing autonomy systems heavily rely on active sensing, e.g., LiDAR, RADAR, and Time-of-Flight sensors, or use (stereo) visible light imaging sensors, e.g., color cameras, to perceive environment geometry and semantics. In scenarios where fully passive perception is required and lighting conditions are degraded to an extent that visible light cameras fail to perceive, most downstream mobility tasks such as obstacle avoidance become impossible. To address such a challenge, this paper presents a Multi-Modal Passive Perception dataset, M2P2, to enable off-road mobility in low-light to no-light conditions. We design a multi-modal sensor suite including thermal, event, and stereo RGB cameras, GPS, two Inertia Measurement Units (IMUs), as well as a high-resolution LiDAR for ground truth, with a novel multi-sensor calibration procedure that can efficiently transform multi-modal perceptual streams into a common coordinate system. Our 10-hour, 32 km dataset also includes mobility data such as robot odometry and actions and covers well-lit, low-light, and no-light conditions, along with paved, on-trail, and off-trail terrain. Our results demonstrate that off-road mobility is possible through only passive perception in extreme low-light conditions using end-to-end learning and classical planning. The project website can be found at https://cs.gmu.edu/~xiao/Research/M2P2/
Sensitivity-Informed Augmentation for Robust Segmentation
Jun 04, 2024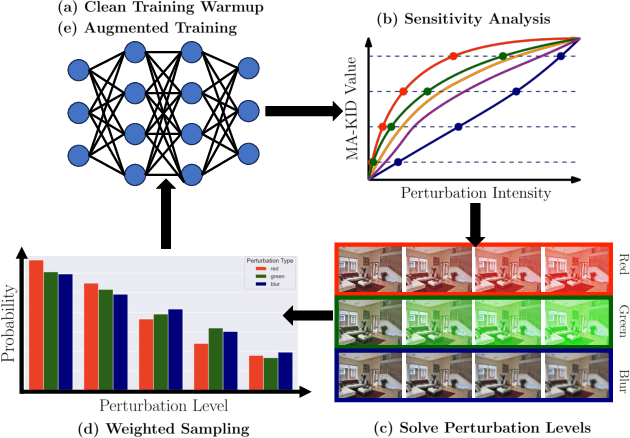
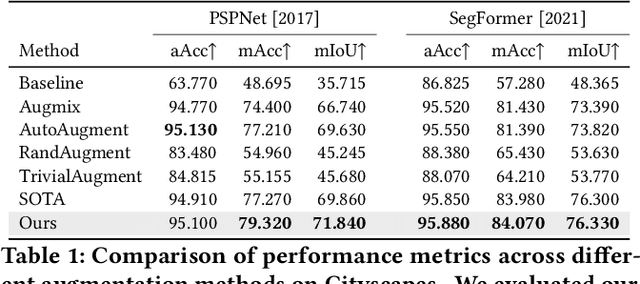
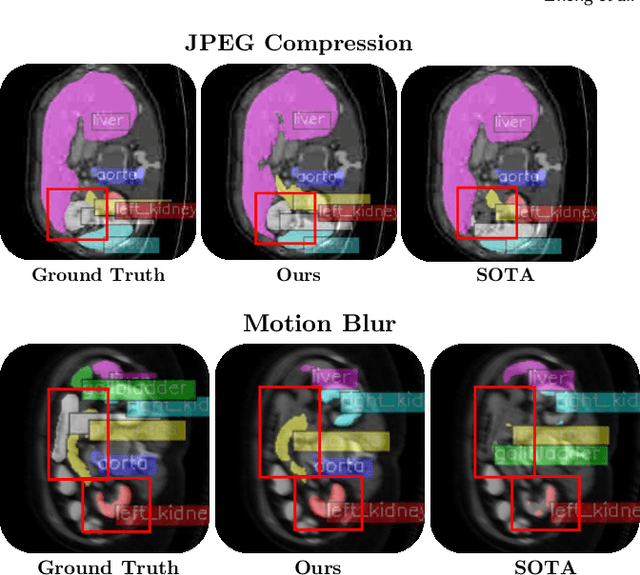
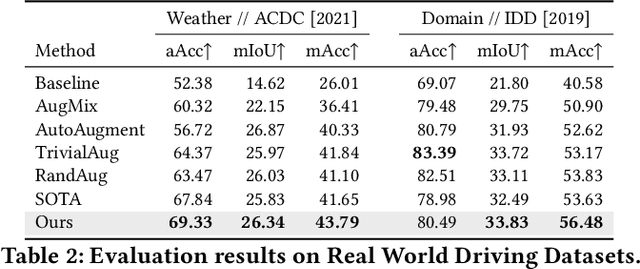
Segmentation is an integral module in many visual computing applications such as virtual try-on, medical imaging, autonomous driving, and agricultural automation. These applications often involve either widespread consumer use or highly variable environments, both of which can degrade the quality of visual sensor data, whether from a common mobile phone or an expensive satellite imaging camera. In addition to external noises like user difference or weather conditions, internal noises such as variations in camera quality or lens distortion can affect the performance of segmentation models during both development and deployment. In this work, we present an efficient, adaptable, and gradient-free method to enhance the robustness of learning-based segmentation models across training. First, we introduce a novel adaptive sensitivity analysis (ASA) using Kernel Inception Distance (KID) on basis perturbations to benchmark perturbation sensitivity of pre-trained segmentation models. Then, we model the sensitivity curve using the adaptive SA and sample perturbation hyperparameter values accordingly. Finally, we conduct adversarial training with the selected perturbation values and dynamically re-evaluate robustness during online training. Our method, implemented end-to-end with minimal fine-tuning required, consistently outperforms state-of-the-art data augmentation techniques for segmentation. It shows significant improvement in both clean data evaluation and real-world adverse scenario evaluation across various segmentation datasets used in visual computing and computer graphics applications.
Measuring Multi-Source Redundancy in Factor Graphs
Mar 13, 2023

Factor graphs are a ubiquitous tool for multi-source inference in robotics and multi-sensor networks. They allow for heterogeneous measurements from many sources to be concurrently represented as factors in the state posterior distribution, so that inference can be conducted via sparse graphical methods. Adding measurements from many sources can supply robustness to state estimation, as seen in distributed pose graph optimization. However, adding excessive measurements to a factor graph can also quickly degrade their performance as more cycles are added to the graph. In both situations, the relevant quality is the redundancy of information. Drawing on recent work in information theory on partial information decomposition (PID), we articulate two potential definitions of redundancy in factor graphs, both within a common axiomatic framework for redundancy in factor graphs. This is the first application of PID to factor graphs, and only one of a few presenting quantitative measures of redundancy for them.