 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStratified Topological Autonomy for Long-Range Coordination (STALC)
Mar 13, 2025



Achieving unified multi-robot coordination and motion planning in complex environments is a challenging problem. In this paper, we present a hierarchical approach to long-range coordination, which we call Stratified Topological Autonomy for Long-Range Coordination (STALC). In particular, we look at the problem of minimizing visibility to observers and maximizing safety with a multi-robot team navigating through a hazardous environment. At its core, our approach relies on the notion of a dynamic topological graph, where the edge weights vary dynamically based on the locations of the robots in the graph. To create this dynamic topological graph, we evaluate the visibility of the robot team from a discrete set of observer locations (both adversarial and friendly), and construct a topological graph whose edge weights depend on both adversary position and robot team configuration. We then impose temporal constraints on the evolution of those edge weights based on robot team state and use Mixed-Integer Programming (MIP) to generate optimal multirobot plans through the graph. The visibility information also informs the lower layers of the autonomy stack to plan minimal visibility paths through the environment for the team of robots. Our approach presents methods to reduce the computational complexity for a team of robots that interact and coordinate across the team to accomplish a common goal. We demonstrate our approach in simulated and hardware experiments in forested and urban environments.
Measuring Multi-Source Redundancy in Factor Graphs
Mar 13, 2023

Factor graphs are a ubiquitous tool for multi-source inference in robotics and multi-sensor networks. They allow for heterogeneous measurements from many sources to be concurrently represented as factors in the state posterior distribution, so that inference can be conducted via sparse graphical methods. Adding measurements from many sources can supply robustness to state estimation, as seen in distributed pose graph optimization. However, adding excessive measurements to a factor graph can also quickly degrade their performance as more cycles are added to the graph. In both situations, the relevant quality is the redundancy of information. Drawing on recent work in information theory on partial information decomposition (PID), we articulate two potential definitions of redundancy in factor graphs, both within a common axiomatic framework for redundancy in factor graphs. This is the first application of PID to factor graphs, and only one of a few presenting quantitative measures of redundancy for them.
WayFAST: Traversability Predictive Navigation for Field Robots
Mar 22, 2022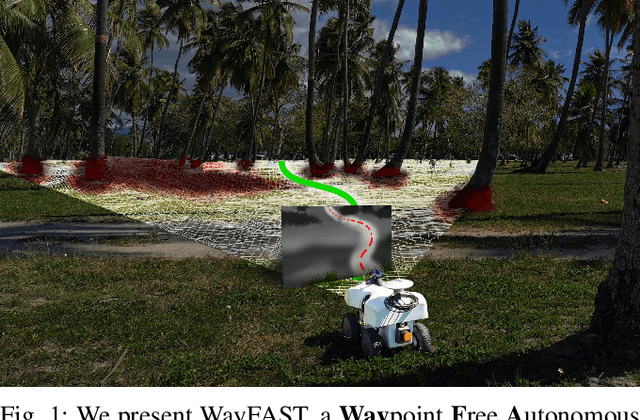
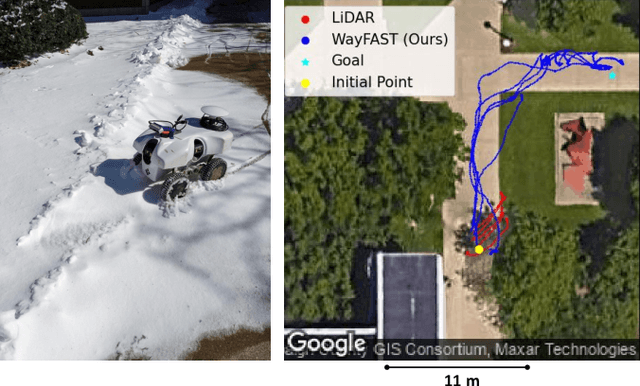
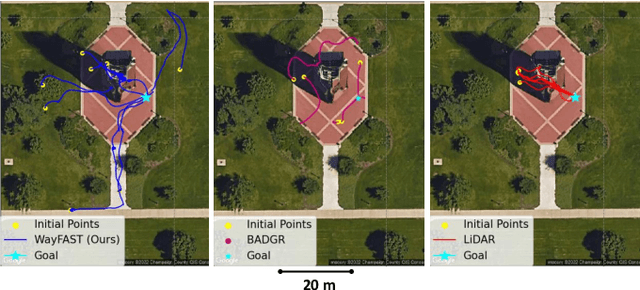
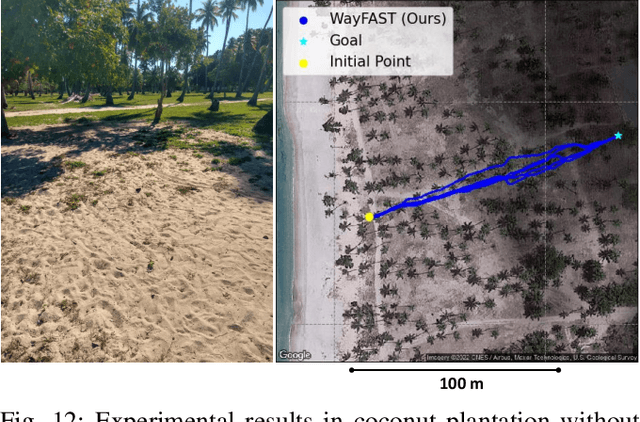
We present a self-supervised approach for learning to predict traversable paths for wheeled mobile robots that require good traction to navigate. Our algorithm, termed WayFAST (Waypoint Free Autonomous Systems for Traversability), uses RGB and depth data, along with navigation experience, to autonomously generate traversable paths in outdoor unstructured environments. Our key inspiration is that traction can be estimated for rolling robots using kinodynamic models. Using traction estimates provided by an online receding horizon estimator, we are able to train a traversability prediction neural network in a self-supervised manner, without requiring heuristics utilized by previous methods. We demonstrate the effectiveness of WayFAST through extensive field testing in varying environments, ranging from sandy dry beaches to forest canopies and snow covered grass fields. Our results clearly demonstrate that WayFAST can learn to avoid geometric obstacles as well as untraversable terrain, such as snow, which would be difficult to avoid with sensors that provide only geometric data, such as LiDAR. Furthermore, we show that our training pipeline based on online traction estimates is more data-efficient than other heuristic-based methods.
Strategic Maneuver and Disruption with Reinforcement Learning Approaches for Multi-Agent Coordination
Mar 17, 2022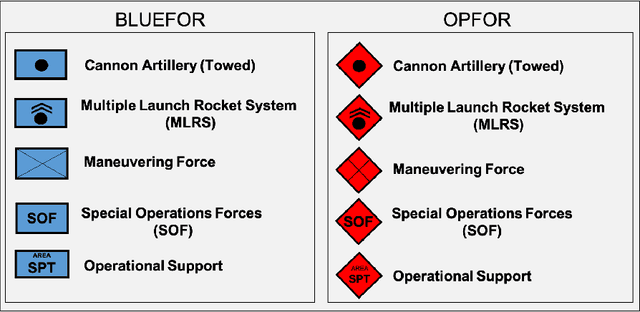
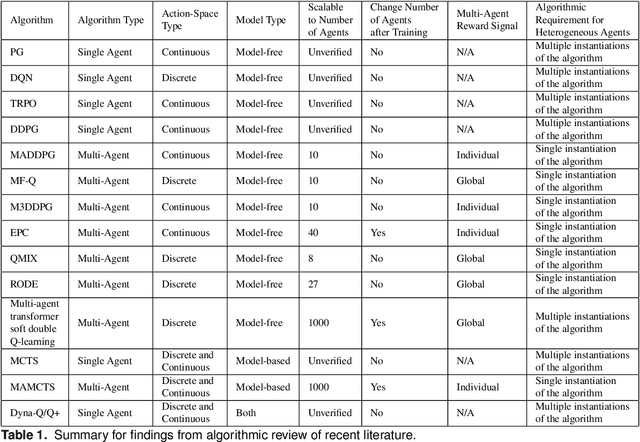
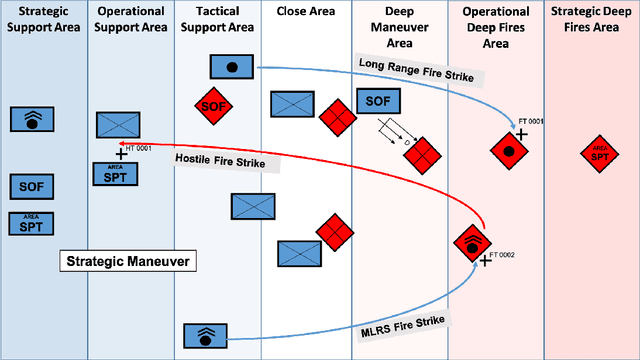
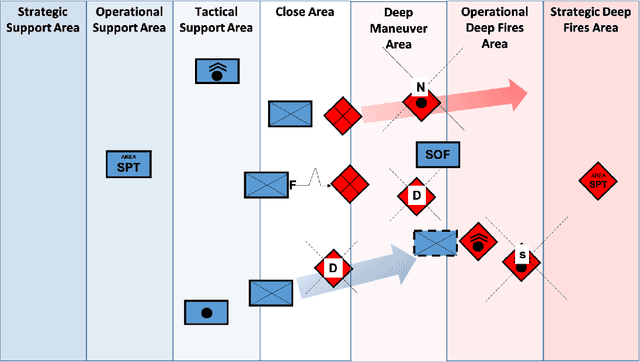
Reinforcement learning (RL) approaches can illuminate emergent behaviors that facilitate coordination across teams of agents as part of a multi-agent system (MAS), which can provide windows of opportunity in various military tasks. Technologically advancing adversaries pose substantial risks to a friendly nation's interests and resources. Superior resources alone are not enough to defeat adversaries in modern complex environments because adversaries create standoff in multiple domains against predictable military doctrine-based maneuvers. Therefore, as part of a defense strategy, friendly forces must use strategic maneuvers and disruption to gain superiority in complex multi-faceted domains such as multi-domain operations (MDO). One promising avenue for implementing strategic maneuver and disruption to gain superiority over adversaries is through coordination of MAS in future military operations. In this paper, we present overviews of prominent works in the RL domain with their strengths and weaknesses for overcoming the challenges associated with performing autonomous strategic maneuver and disruption in military contexts.
Distributed Mapping with Privacy and Communication Constraints: Lightweight Algorithms and Object-based Models
Feb 11, 2017
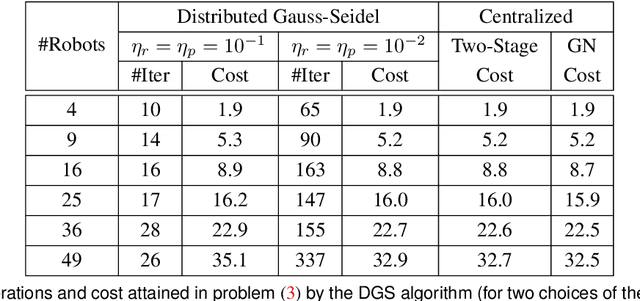
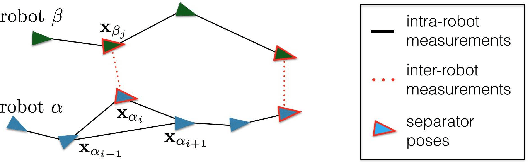
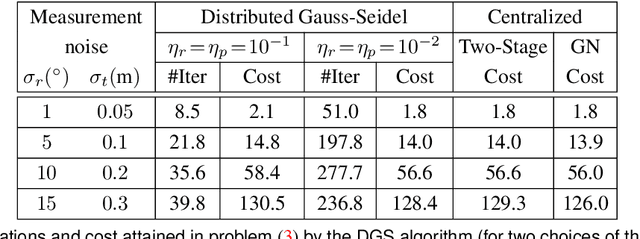
We consider the following problem: a team of robots is deployed in an unknown environment and it has to collaboratively build a map of the area without a reliable infrastructure for communication. The backbone for modern mapping techniques is pose graph optimization, which estimates the trajectory of the robots, from which the map can be easily built. The first contribution of this paper is a set of distributed algorithms for pose graph optimization: rather than sending all sensor data to a remote sensor fusion server, the robots exchange very partial and noisy information to reach an agreement on the pose graph configuration. Our approach can be considered as a distributed implementation of the two-stage approach of Carlone et al., where we use the Successive Over-Relaxation (SOR) and the Jacobi Over-Relaxation (JOR) as workhorses to split the computation among the robots. As a second contribution, we extend %and demonstrate the applicability of the proposed distributed algorithms to work with object-based map models. The use of object-based models avoids the exchange of raw sensor measurements (e.g., point clouds) further reducing the communication burden. Our third contribution is an extensive experimental evaluation of the proposed techniques, including tests in realistic Gazebo simulations and field experiments in a military test facility. Abundant experimental evidence suggests that one of the proposed algorithms (the Distributed Gauss-Seidel method or DGS) has excellent performance. The DGS requires minimal information exchange, has an anytime flavor, scales well to large teams, is robust to noise, and is easy to implement. Our field tests show that the combined use of our distributed algorithms and object-based models reduces the communication requirements by several orders of magnitude and enables distributed mapping with large teams of robots in real-world problems.