 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStratified Topological Autonomy for Long-Range Coordination (STALC)
Mar 13, 2025



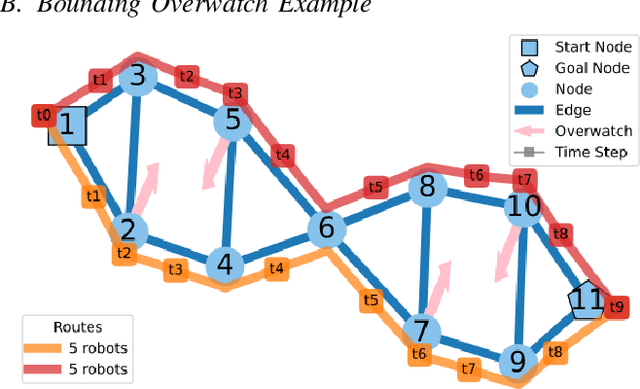
Achieving unified multi-robot coordination and motion planning in complex environments is a challenging problem. In this paper, we present a hierarchical approach to long-range coordination, which we call Stratified Topological Autonomy for Long-Range Coordination (STALC). In particular, we look at the problem of minimizing visibility to observers and maximizing safety with a multi-robot team navigating through a hazardous environment. At its core, our approach relies on the notion of a dynamic topological graph, where the edge weights vary dynamically based on the locations of the robots in the graph. To create this dynamic topological graph, we evaluate the visibility of the robot team from a discrete set of observer locations (both adversarial and friendly), and construct a topological graph whose edge weights depend on both adversary position and robot team configuration. We then impose temporal constraints on the evolution of those edge weights based on robot team state and use Mixed-Integer Programming (MIP) to generate optimal multirobot plans through the graph. The visibility information also informs the lower layers of the autonomy stack to plan minimal visibility paths through the environment for the team of robots. Our approach presents methods to reduce the computational complexity for a team of robots that interact and coordinate across the team to accomplish a common goal. We demonstrate our approach in simulated and hardware experiments in forested and urban environments.
Uncertainty-Aware Planning for Heterogeneous Robot Teams using Dynamic Topological Graphs and Mixed-Integer Programming
Oct 12, 2023



Planning under uncertainty is a fundamental challenge in robotics. For multi-robot teams, the challenge is further exacerbated, since the planning problem can quickly become computationally intractable as the number of robots increase. In this paper, we propose a novel approach for planning under uncertainty using heterogeneous multi-robot teams. In particular, we leverage the notion of a dynamic topological graph and mixed-integer programming to generate multi-robot plans that deploy fast scout team members to reduce uncertainty about the environment. We test our approach in a number of representative scenarios where the robot team must move through an environment while minimizing detection in the presence of uncertain observer positions. We demonstrate that our approach is sufficiently computationally tractable for real-time re-planning in changing environments, can improve performance in the presence of imperfect information, and can be adjusted to accommodate different risk profiles.
Floating-base manipulation on zero-perturbation manifolds
Jul 05, 2023To achieve high-dexterity motion planning on floating-base systems, the base dynamics induced by arm motions must be treated carefully. In general, it is a significant challenge to establish a fixed-base frame during tasking due to forces and torques on the base that arise directly from arm motions (e.g. arm drag in low Reynolds environments and arm momentum in high Reynolds environments). While thrusters can in theory be used to regulate the vehicle pose, it is often insufficient to establish a stable pose for precise tasking, whether the cause be due to underactuation, modeling inaccuracy, suboptimal control parameters, or insufficient power. We propose a solution that asks the thrusters to do less high bandwidth perturbation correction by planning arm motions that induce zero perturbation on the base. We are able to cast our motion planner as a nonholonomic rapidly-exploring random tree (RRT) by representing the floating-base dynamics as pfaffian constraints on joint velocity. These constraints guide the manipulators to move on zero-perturbation manifolds (which inhabit a subspace of the tangent space of the internal configuration space). To invoke this representation (termed a \textit{perturbation map}) we assume the body velocity (perturbation) of the base to be a joint-defined linear mapping of joint velocity and describe situations where this assumption is realistic (including underwater, aerial, and orbital environments). The core insight of this work is that when perturbation of the floating-base has affine structure with respect to joint velocity, it provides the system a class of kinematic reduction that permits the use of sample-based motion planners (specifically a nonholonomic RRT). We show that this allows rapid, exploration-geared motion planning for high degree of freedom systems in obstacle rich environments, even on floating-base systems with nontrivial dynamics.
Multi-Robot Planning on Dynamic Topological Graphs using Mixed-Integer Programming
Mar 21, 2023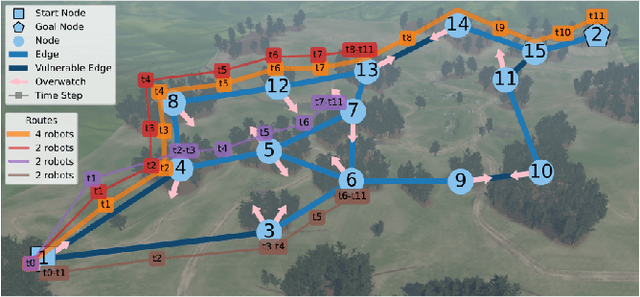
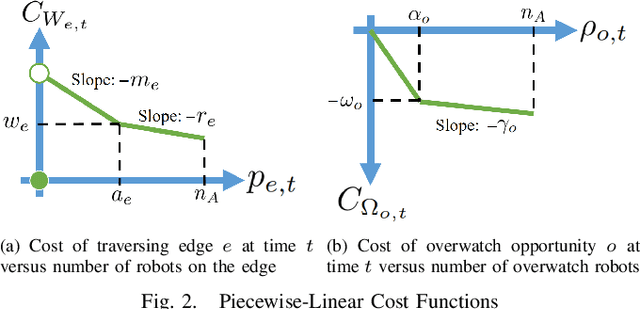
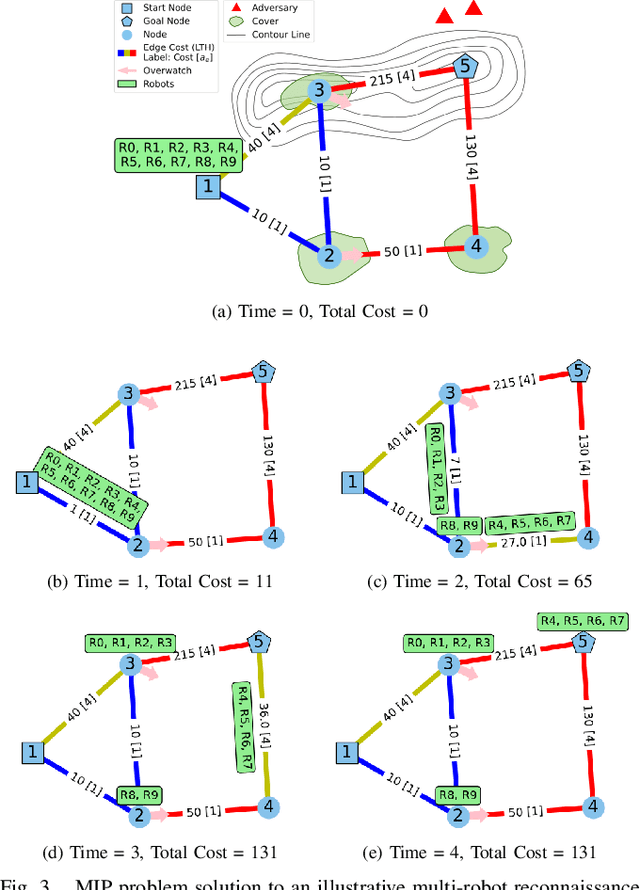
Planning for multi-robot teams in complex environments is a challenging problem, especially when these teams must coordinate to accomplish a common objective. In general, optimal solutions to these planning problems are computationally intractable, since the decision space grows exponentially with the number of robots. In this paper, we present a novel approach for multi-robot planning on topological graphs using mixed-integer programming. Central to our approach is the notion of a dynamic topological graph, where edge weights vary dynamically based on the locations of the robots in the graph. We construct this graph using the critical features of the planning problem and the relationships between robots; we then leverage mixed-integer programming to minimize a shared cost that depends on the paths of all robots through the graph. To improve computational tractability, we formulated an objective function with a fully convex relaxation and designed our decision space around eliminating the exponential dependence on the number of robots. We test our approach on a multi-robot reconnaissance scenario, where robots must coordinate to minimize detectability and maximize safety while gathering information. We demonstrate that our approach is able to scale to a series of representative scenarios and is capable of computing optimal coordinated strategic behaviors for autonomous multi-robot teams in seconds.