 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStratified Topological Autonomy for Long-Range Coordination (STALC)
Mar 13, 2025



Achieving unified multi-robot coordination and motion planning in complex environments is a challenging problem. In this paper, we present a hierarchical approach to long-range coordination, which we call Stratified Topological Autonomy for Long-Range Coordination (STALC). In particular, we look at the problem of minimizing visibility to observers and maximizing safety with a multi-robot team navigating through a hazardous environment. At its core, our approach relies on the notion of a dynamic topological graph, where the edge weights vary dynamically based on the locations of the robots in the graph. To create this dynamic topological graph, we evaluate the visibility of the robot team from a discrete set of observer locations (both adversarial and friendly), and construct a topological graph whose edge weights depend on both adversary position and robot team configuration. We then impose temporal constraints on the evolution of those edge weights based on robot team state and use Mixed-Integer Programming (MIP) to generate optimal multirobot plans through the graph. The visibility information also informs the lower layers of the autonomy stack to plan minimal visibility paths through the environment for the team of robots. Our approach presents methods to reduce the computational complexity for a team of robots that interact and coordinate across the team to accomplish a common goal. We demonstrate our approach in simulated and hardware experiments in forested and urban environments.
Non-Prehensile Aerial Manipulation using Model-Based Deep Reinforcement Learning
Jul 01, 2024With the continual adoption of Uncrewed Aerial Vehicles (UAVs) across a wide-variety of application spaces, robust aerial manipulation remains a key research challenge. Aerial manipulation tasks require interacting with objects in the environment, often without knowing their dynamical properties like mass and friction a priori. Additionally, interacting with these objects can have a significant impact on the control and stability of the vehicle. We investigated an approach for robust control and non-prehensile aerial manipulation in unknown environments. In particular, we use model-based Deep Reinforcement Learning (DRL) to learn a world model of the environment while simultaneously learning a policy for interaction with the environment. We evaluated our approach on a series of push tasks by moving an object between goal locations and demonstrated repeatable behaviors across a range of friction values.
Survey of Simulators for Aerial Robots
Nov 04, 2023Uncrewed Aerial Vehicle (UAV) research faces challenges with safety, scalability, costs, and ecological impact when conducting hardware testing. High-fidelity simulators offer a vital solution by replicating real-world conditions to enable the development and evaluation of novel perception and control algorithms. However, the large number of available simulators poses a significant challenge for researchers to determine which simulator best suits their specific use-case, based on each simulator's limitations and customization readiness. This paper analyzes existing UAV simulators and decision factors for their selection, aiming to enhance the efficiency and safety of research endeavors.
Uncertainty-Aware Planning for Heterogeneous Robot Teams using Dynamic Topological Graphs and Mixed-Integer Programming
Oct 12, 2023



Planning under uncertainty is a fundamental challenge in robotics. For multi-robot teams, the challenge is further exacerbated, since the planning problem can quickly become computationally intractable as the number of robots increase. In this paper, we propose a novel approach for planning under uncertainty using heterogeneous multi-robot teams. In particular, we leverage the notion of a dynamic topological graph and mixed-integer programming to generate multi-robot plans that deploy fast scout team members to reduce uncertainty about the environment. We test our approach in a number of representative scenarios where the robot team must move through an environment while minimizing detection in the presence of uncertain observer positions. We demonstrate that our approach is sufficiently computationally tractable for real-time re-planning in changing environments, can improve performance in the presence of imperfect information, and can be adjusted to accommodate different risk profiles.
A Small Form Factor Aerial Research Vehicle for Pick-and-Place Tasks with Onboard Real-Time Object Detection and Visual Odometry
Aug 02, 2023



This paper introduces a novel, small form-factor, aerial vehicle research platform for agile object detection, classification, tracking, and interaction tasks. General-purpose hardware components were designed to augment a given aerial vehicle and enable it to perform safe and reliable grasping. These components include a custom collision tolerant cage and low-cost Gripper Extension Package, which we call GREP, for object grasping. Small vehicles enable applications in highly constrained environments, but are often limited by computational resources. This work evaluates the challenges of pick-and-place tasks, with entirely onboard computation of object pose and visual odometry based state estimation on a small platform, and demonstrates experiments with enough accuracy to reliably grasp objects. In a total of 70 trials across challenging cases such as cluttered environments, obstructed targets, and multiple instances of the same target, we demonstrated successfully grasping the target in 93% of trials. Both the hardware component designs and software framework are released as open-source, since our intention is to enable easy reproduction and application on a wide range of small vehicles.
Multi-Robot Planning on Dynamic Topological Graphs using Mixed-Integer Programming
Mar 21, 2023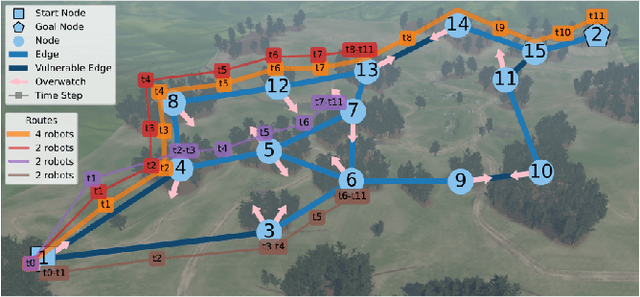
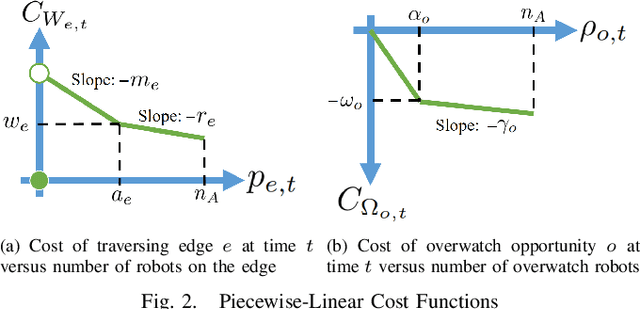
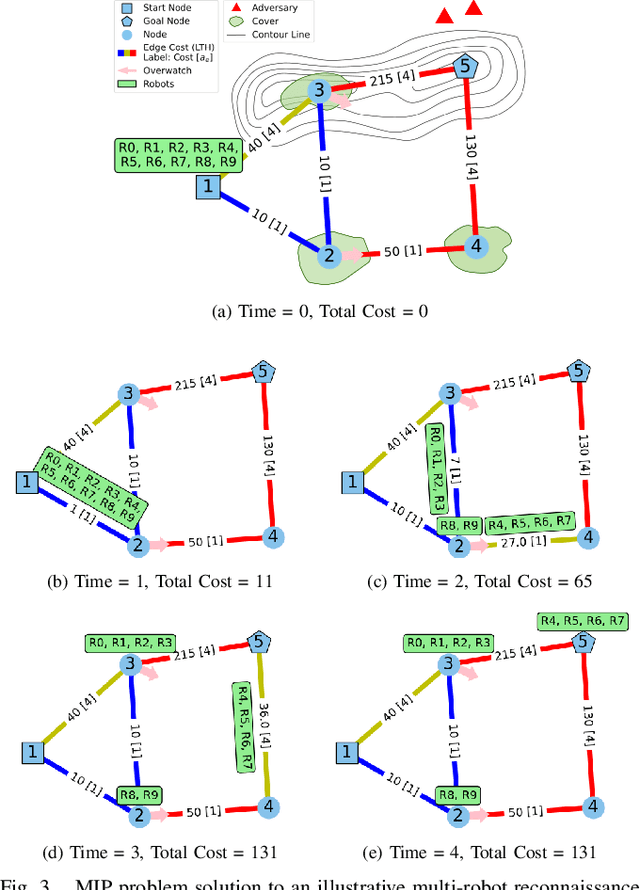
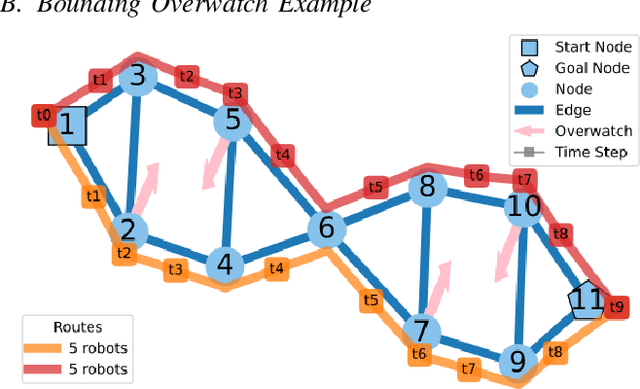
Planning for multi-robot teams in complex environments is a challenging problem, especially when these teams must coordinate to accomplish a common objective. In general, optimal solutions to these planning problems are computationally intractable, since the decision space grows exponentially with the number of robots. In this paper, we present a novel approach for multi-robot planning on topological graphs using mixed-integer programming. Central to our approach is the notion of a dynamic topological graph, where edge weights vary dynamically based on the locations of the robots in the graph. We construct this graph using the critical features of the planning problem and the relationships between robots; we then leverage mixed-integer programming to minimize a shared cost that depends on the paths of all robots through the graph. To improve computational tractability, we formulated an objective function with a fully convex relaxation and designed our decision space around eliminating the exponential dependence on the number of robots. We test our approach on a multi-robot reconnaissance scenario, where robots must coordinate to minimize detectability and maximize safety while gathering information. We demonstrate that our approach is able to scale to a series of representative scenarios and is capable of computing optimal coordinated strategic behaviors for autonomous multi-robot teams in seconds.