 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAnomaly Detection in IEC-61850 GOOSE Networks: Evaluating Unsupervised and Temporal Learning for Real-Time Intrusion Detection
Apr 14, 2026The IEC-61850 GOOSE protocol underpins time-critical communication in modern digital substations but lacks native security mechanisms, leaving it vulnerable to replay, masquerade, and data injection attacks. Intrusion detection in this setting is challenging due to strict latency constraints (sub-4ms) and limited availability of labeled attack data. This paper evaluates whether unsupervised temporal modeling can provide effective and deployable anomaly detection for GOOSE networks. Five models are compared on the ERENO IEC-61850 dataset: a supervised Random Forest baseline, a feedforward Autoencoder, and three recurrent sequence autoencoders (RNN, LSTM, and GRU). The supervised Random Forest achieves the highest detection performance (F1=0.9516) but fails to meet real-time constraints at 21.8ms per prediction. All four unsupervised models satisfy the 4ms requirement, with the GRU achieving the best accuracy to latency tradeoff among them (F1=0.8737 at 1.118ms). A cross-environment evaluation on an independent dataset shows that all models degrade under distribution shift. However, recurrent models retain substantially higher relative performance than the supervised baseline, suggesting that temporal sequence modeling generalizes better than fitting labeled attack distributions. Anomaly thresholds for the unsupervised models are selected on a held out validation partition to avoid test set leakage. These results support unsupervised temporal models as a practical choice for real-time GOOSE intrusion detection, particularly in environments where labeled training data may be unavailable or where large-scale deployment across diverse substations is required.
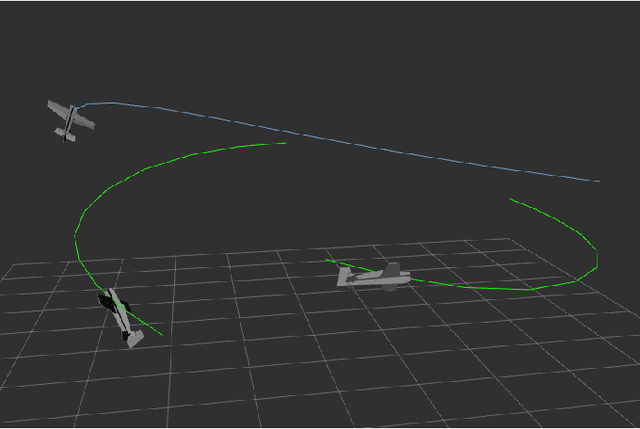
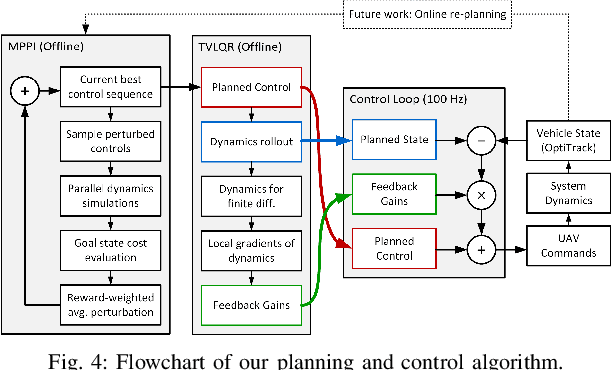
Real-Time Planning and Control with a Vortex Particle Model for Fixed-Wing UAVs in Unsteady Flows
Sep 19, 2025Unsteady aerodynamic effects can have a profound impact on aerial vehicle flight performance, especially during agile maneuvers and in complex aerodynamic environments. In this paper, we present a real-time planning and control approach capable of reasoning about unsteady aerodynamics. Our approach relies on a lightweight vortex particle model, parallelized to allow GPU acceleration, and a sampling-based policy optimization strategy capable of leveraging the vortex particle model for predictive reasoning. We demonstrate, through both simulation and hardware experiments, that by replanning with our unsteady aerodynamics model, we can improve the performance of aggressive post-stall maneuvers in the presence of unsteady environmental flow disturbances.
Stratified Topological Autonomy for Long-Range Coordination (STALC)
Mar 13, 2025



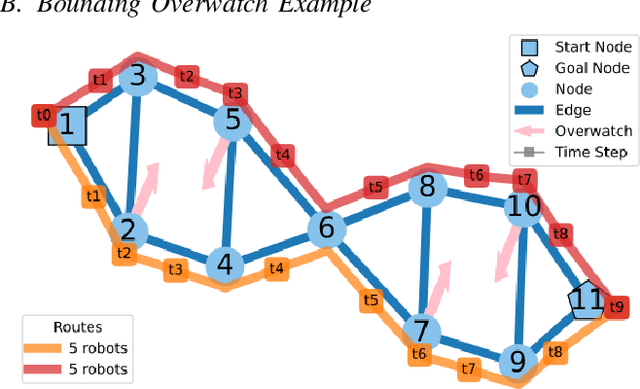
Achieving unified multi-robot coordination and motion planning in complex environments is a challenging problem. In this paper, we present a hierarchical approach to long-range coordination, which we call Stratified Topological Autonomy for Long-Range Coordination (STALC). In particular, we look at the problem of minimizing visibility to observers and maximizing safety with a multi-robot team navigating through a hazardous environment. At its core, our approach relies on the notion of a dynamic topological graph, where the edge weights vary dynamically based on the locations of the robots in the graph. To create this dynamic topological graph, we evaluate the visibility of the robot team from a discrete set of observer locations (both adversarial and friendly), and construct a topological graph whose edge weights depend on both adversary position and robot team configuration. We then impose temporal constraints on the evolution of those edge weights based on robot team state and use Mixed-Integer Programming (MIP) to generate optimal multirobot plans through the graph. The visibility information also informs the lower layers of the autonomy stack to plan minimal visibility paths through the environment for the team of robots. Our approach presents methods to reduce the computational complexity for a team of robots that interact and coordinate across the team to accomplish a common goal. We demonstrate our approach in simulated and hardware experiments in forested and urban environments.
Dense Fixed-Wing Swarming using Receding-Horizon NMPC
Feb 06, 2025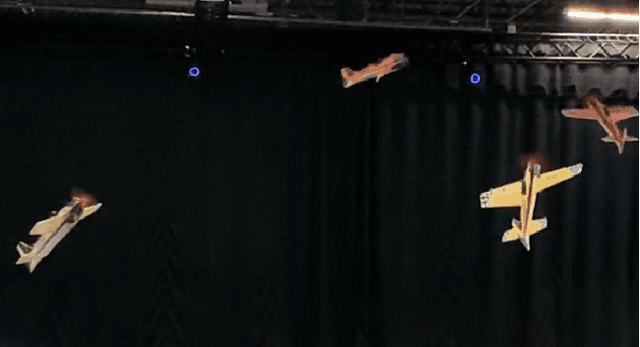


In this paper, we present an approach for controlling a team of agile fixed-wing aerial vehicles in close proximity to one another. Our approach relies on receding-horizon nonlinear model predictive control (NMPC) to plan maneuvers across an expanded flight envelope to enable inter-agent collision avoidance. To facilitate robust collision avoidance and characterize the likelihood of inter-agent collisions, we compute a statistical bound on the probability of the system leaving a tube around the planned nominal trajectory. Finally, we propose a metric for evaluating highly dynamic swarms and use this metric to evaluate our approach. We successfully demonstrated our approach through both simulation and hardware experiments, and to our knowledge, this the first time close-quarters swarming has been achieved with physical aerobatic fixed-wing vehicles.
Multi-Agent Feedback Motion Planning using Probably Approximately Correct Nonlinear Model Predictive Control
Jan 21, 2025



For many tasks, multi-robot teams often provide greater efficiency, robustness, and resiliency. However, multi-robot collaboration in real-world scenarios poses a number of major challenges, especially when dynamic robots must balance competing objectives like formation control and obstacle avoidance in the presence of stochastic dynamics and sensor uncertainty. In this paper, we propose a distributed, multi-agent receding-horizon feedback motion planning approach using Probably Approximately Correct Nonlinear Model Predictive Control (PAC-NMPC) that is able to reason about both model and measurement uncertainty to achieve robust multi-agent formation control while navigating cluttered obstacle fields and avoiding inter-robot collisions. Our approach relies not only on the underlying PAC-NMPC algorithm but also on a terminal cost-function derived from gyroscopic obstacle avoidance. Through numerical simulation, we show that our distributed approach performs on par with a centralized formulation, that it offers improved performance in the case of significant measurement noise, and that it can scale to more complex dynamical systems.
Survey of Simulators for Aerial Robots
Nov 04, 2023Uncrewed Aerial Vehicle (UAV) research faces challenges with safety, scalability, costs, and ecological impact when conducting hardware testing. High-fidelity simulators offer a vital solution by replicating real-world conditions to enable the development and evaluation of novel perception and control algorithms. However, the large number of available simulators poses a significant challenge for researchers to determine which simulator best suits their specific use-case, based on each simulator's limitations and customization readiness. This paper analyzes existing UAV simulators and decision factors for their selection, aiming to enhance the efficiency and safety of research endeavors.
Uncertainty-Aware Planning for Heterogeneous Robot Teams using Dynamic Topological Graphs and Mixed-Integer Programming
Oct 12, 2023



Planning under uncertainty is a fundamental challenge in robotics. For multi-robot teams, the challenge is further exacerbated, since the planning problem can quickly become computationally intractable as the number of robots increase. In this paper, we propose a novel approach for planning under uncertainty using heterogeneous multi-robot teams. In particular, we leverage the notion of a dynamic topological graph and mixed-integer programming to generate multi-robot plans that deploy fast scout team members to reduce uncertainty about the environment. We test our approach in a number of representative scenarios where the robot team must move through an environment while minimizing detection in the presence of uncertain observer positions. We demonstrate that our approach is sufficiently computationally tractable for real-time re-planning in changing environments, can improve performance in the presence of imperfect information, and can be adjusted to accommodate different risk profiles.
PAC-NMPC with Learned Perception-Informed Value Function
Sep 22, 2023



Nonlinear model predictive control (NMPC) is typically restricted to short, finite horizons to limit the computational burden of online optimization. This makes a global planner necessary to avoid local minima when using NMPC for navigation in complex environments. For this reason, the performance of NMPC approaches are often limited by that of the global planner. While control policies trained with reinforcement learning (RL) can theoretically learn to avoid such local minima, they are usually unable to guarantee enforcement of general state constraints. In this paper, we augment a sampling-based stochastic NMPC (SNMPC) approach with an RL trained perception-informed value function. This allows the system to avoid observable local minima in the environment by reasoning about perception information beyond the finite planning horizon. By using Probably Approximately Correct NMPC (PAC-NMPC) as our base controller, we are also able to generate statistical guarantees of performance and safety. We demonstrate our approach in simulation and on hardware using a 1/10th scale rally car with lidar.
Planning and Control for a Dynamic Morphing-Wing UAV Using a Vortex Particle Model
Jul 05, 2023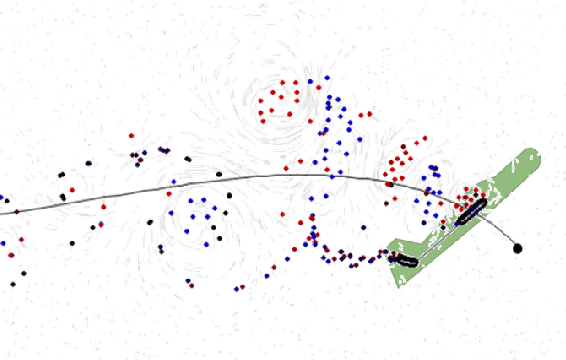
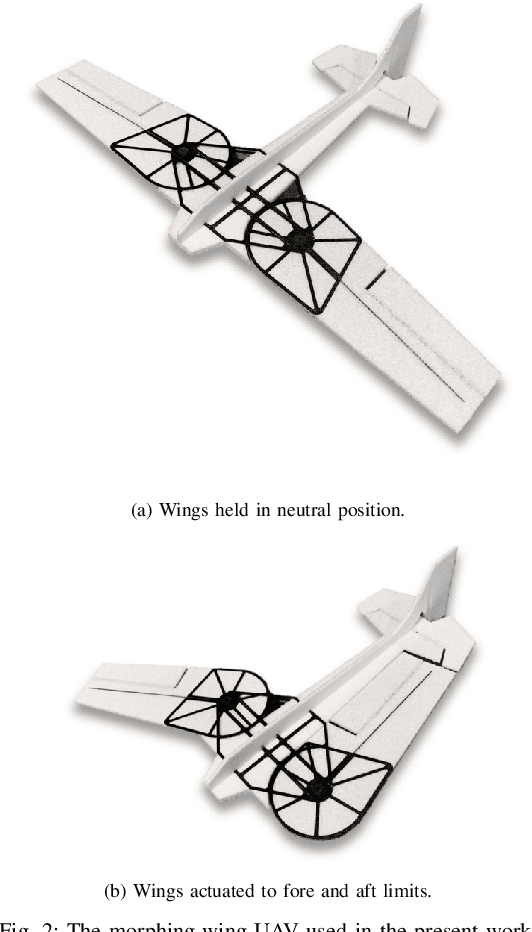
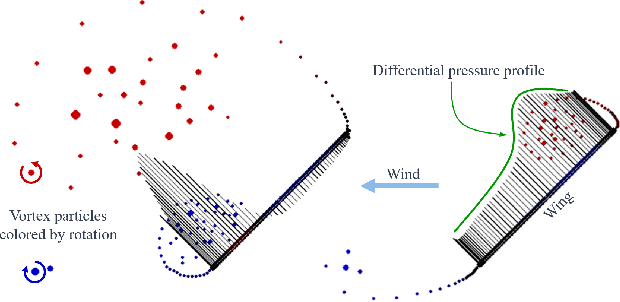
Achieving precise, highly-dynamic maneuvers with Unmanned Aerial Vehicles (UAVs) is a major challenge due to the complexity of the associated aerodynamics. In particular, unsteady effects -- as might be experienced in post-stall regimes or during sudden vehicle morphing -- can have an adverse impact on the performance of modern flight control systems. In this paper, we present a vortex particle model and associated model-based controller capable of reasoning about the unsteady aerodynamics during aggressive maneuvers. We evaluate our approach in hardware on a morphing-wing UAV executing post-stall perching maneuvers. Our results show that the use of the unsteady aerodynamics model improves performance during both fixed-wing and dynamic-wing perching, while the use of wing-morphing planned with quasi-steady aerodynamics results in reduced performance. While the focus of this paper is a pre-computed control policy, we believe that, with sufficient computational resources, our approach could enable online planning in the future.
Multi-Robot Planning on Dynamic Topological Graphs using Mixed-Integer Programming
Mar 21, 2023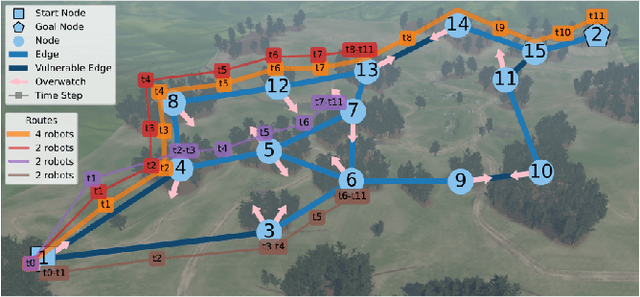
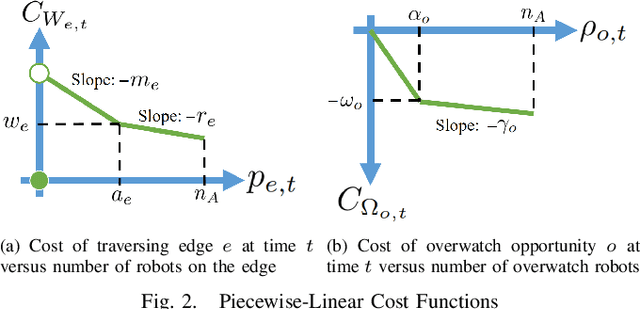
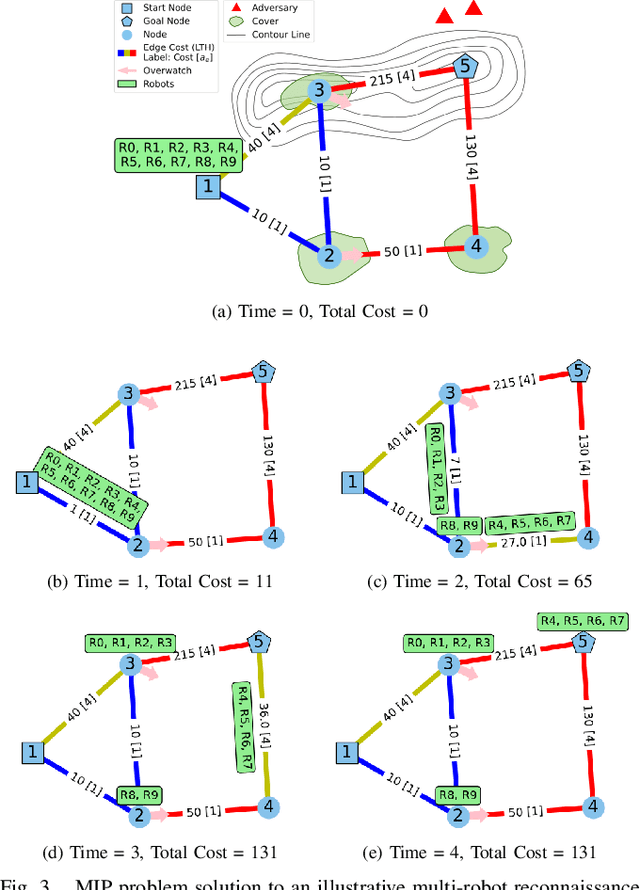
Planning for multi-robot teams in complex environments is a challenging problem, especially when these teams must coordinate to accomplish a common objective. In general, optimal solutions to these planning problems are computationally intractable, since the decision space grows exponentially with the number of robots. In this paper, we present a novel approach for multi-robot planning on topological graphs using mixed-integer programming. Central to our approach is the notion of a dynamic topological graph, where edge weights vary dynamically based on the locations of the robots in the graph. We construct this graph using the critical features of the planning problem and the relationships between robots; we then leverage mixed-integer programming to minimize a shared cost that depends on the paths of all robots through the graph. To improve computational tractability, we formulated an objective function with a fully convex relaxation and designed our decision space around eliminating the exponential dependence on the number of robots. We test our approach on a multi-robot reconnaissance scenario, where robots must coordinate to minimize detectability and maximize safety while gathering information. We demonstrate that our approach is able to scale to a series of representative scenarios and is capable of computing optimal coordinated strategic behaviors for autonomous multi-robot teams in seconds.