 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePlanning and Control for a Dynamic Morphing-Wing UAV Using a Vortex Particle Model
Jul 05, 2023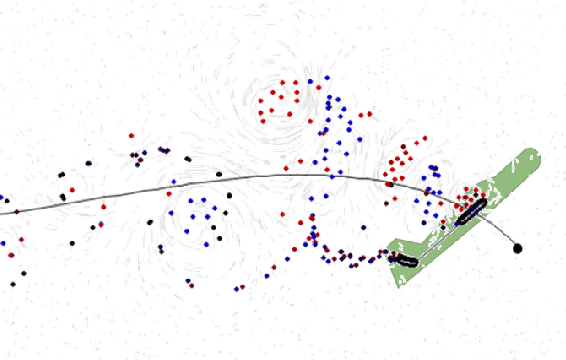
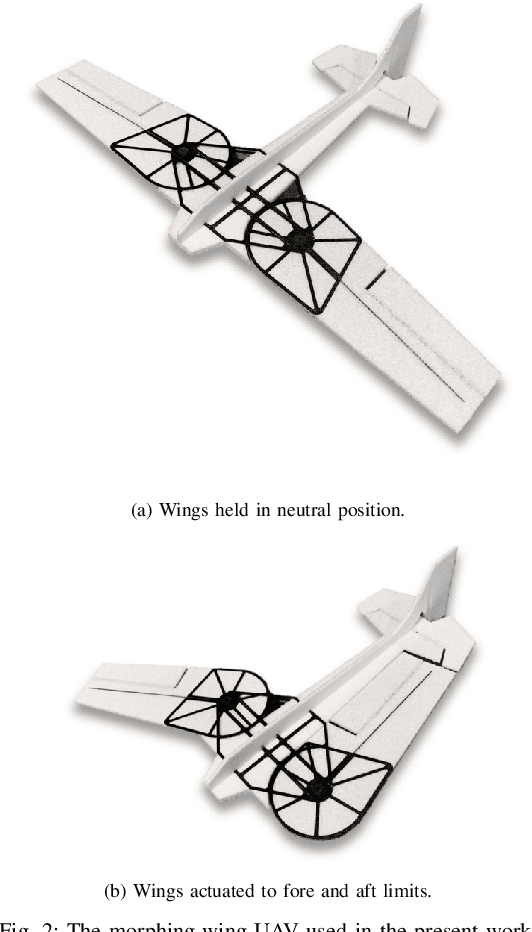
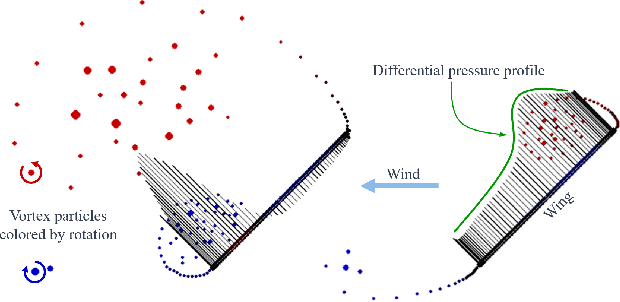
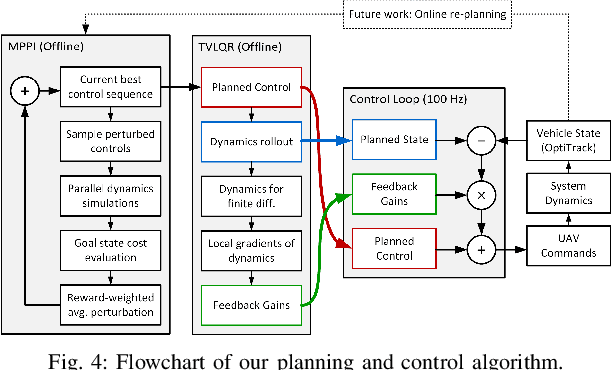
Achieving precise, highly-dynamic maneuvers with Unmanned Aerial Vehicles (UAVs) is a major challenge due to the complexity of the associated aerodynamics. In particular, unsteady effects -- as might be experienced in post-stall regimes or during sudden vehicle morphing -- can have an adverse impact on the performance of modern flight control systems. In this paper, we present a vortex particle model and associated model-based controller capable of reasoning about the unsteady aerodynamics during aggressive maneuvers. We evaluate our approach in hardware on a morphing-wing UAV executing post-stall perching maneuvers. Our results show that the use of the unsteady aerodynamics model improves performance during both fixed-wing and dynamic-wing perching, while the use of wing-morphing planned with quasi-steady aerodynamics results in reduced performance. While the focus of this paper is a pre-computed control policy, we believe that, with sufficient computational resources, our approach could enable online planning in the future.
Post-Stall Navigation with Fixed-Wing UAVs using Onboard Vision
Jan 04, 2022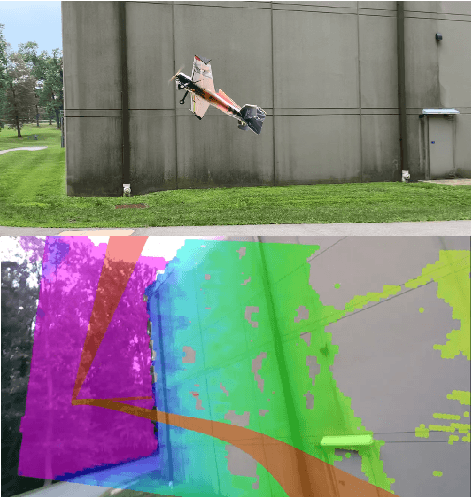
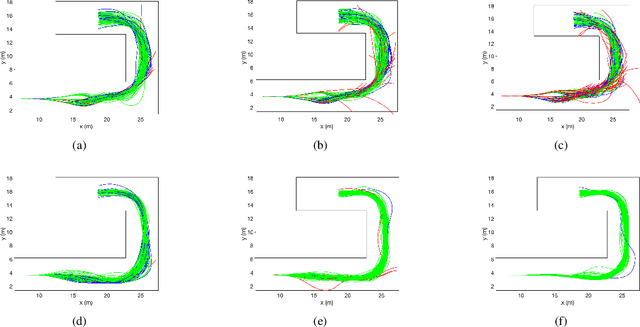
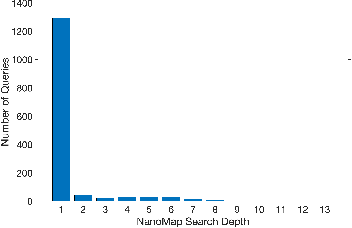
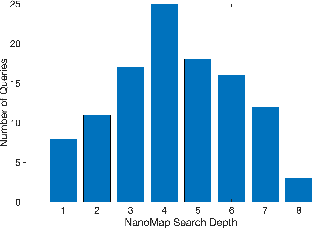
Recent research has enabled fixed-wing unmanned aerial vehicles (UAVs) to maneuver in constrained spaces through the use of direct nonlinear model predictive control (NMPC). However, this approach has been limited to a priori known maps and ground truth state measurements. In this paper, we present a direct NMPC approach that leverages NanoMap, a light-weight point-cloud mapping framework to generate collision-free trajectories using onboard stereo vision. We first explore our approach in simulation and demonstrate that our algorithm is sufficient to enable vision-based navigation in urban environments. We then demonstrate our approach in hardware using a 42-inch fixed-wing UAV and show that our motion planning algorithm is capable of navigating around a building using a minimalistic set of goal-points. We also show that storing a point-cloud history is important for navigating these types of constrained environments.