 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNonlinear Predictive Control of the Continuum and Hybrid Dynamics of a Suspended Deformable Cable for Aerial Pick and Place
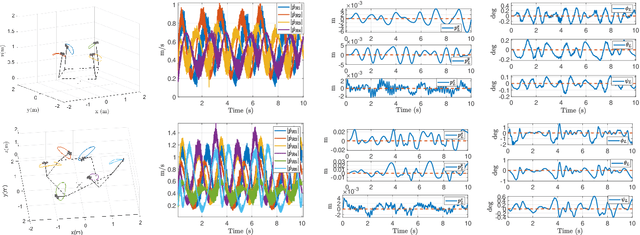
Feb 19, 2026This paper presents a framework for aerial manipulation of an extensible cable that combines a high-fidelity model based on partial differential equations (PDEs) with a reduced-order representation suitable for real-time control. The PDEs are discretised using a finite-difference method, and proper orthogonal decomposition is employed to extract a reduced-order model (ROM) that retains the dominant deformation modes while significantly reducing computational complexity. Based on this ROM, a nonlinear model predictive control scheme is formulated, capable of stabilizing cable oscillations and handling hybrid transitions such as payload attachment and detachment. Simulation results confirm the stability, efficiency, and robustness of the ROM, as well as the effectiveness of the controller in regulating cable dynamics under a range of operating conditions. Additional simulations illustrate the application of the ROM for trajectory planning in constrained environments, demonstrating the versatility of the proposed approach. Overall, the framework enables real-time, dynamics-aware control of unmanned aerial vehicles (UAVs) carrying suspended flexible cables.
Geometric Inverse Flight Dynamics on SO(3) and Application to Tethered Fixed-Wing Aircraft
Feb 19, 2026We present a robotics-oriented, coordinate-free formulation of inverse flight dynamics for fixed-wing aircraft on SO(3). Translational force balance is written in the world frame and rotational dynamics in the body frame; aerodynamic directions (drag, lift, side) are defined geometrically, avoiding local attitude coordinates. Enforcing coordinated flight (no sideslip), we derive a closed-form trajectory-to-input map yielding the attitude, angular velocity, and thrust-angle-of-attack pair, and we recover the aerodynamic moment coefficients component-wise. Applying such a map to tethered flight on spherical parallels, we obtain analytic expressions for the required bank angle and identify a specific zero-bank locus where the tether tension exactly balances centrifugal effects, highlighting the decoupling between aerodynamic coordination and the apparent gravity vector. Under a simple lift/drag law, the minimal-thrust angle of attack admits a closed form. These pointwise quasi-steady inversion solutions become steady-flight trim when the trajectory and rotational dynamics are time-invariant. The framework bridges inverse simulation in aeronautics with geometric modeling in robotics, providing a rigorous building block for trajectory design and feasibility checks.
Manipulation of Elasto-Flexible Cables with Single or Multiple UAVs
Mar 06, 2025



This work considers a large class of systems composed of multiple quadrotors manipulating deformable and extensible cables. The cable is described via a discretized representation, which decomposes it into linear springs interconnected through lumped-mass passive spherical joints. Sets of flat outputs are found for the systems. Numerical simulations support the findings by showing cable manipulation relying on flatness-based trajectories. Eventually, we present an experimental validation of the effectiveness of the proposed discretized cable model for a two-robot example. Moreover, a closed-loop controller based on the identified model and using cable-output feedback is experimentally tested.
Coordinated Trajectories for Non-stop Flying Carriers Holding a Cable-Suspended Load
Mar 05, 2025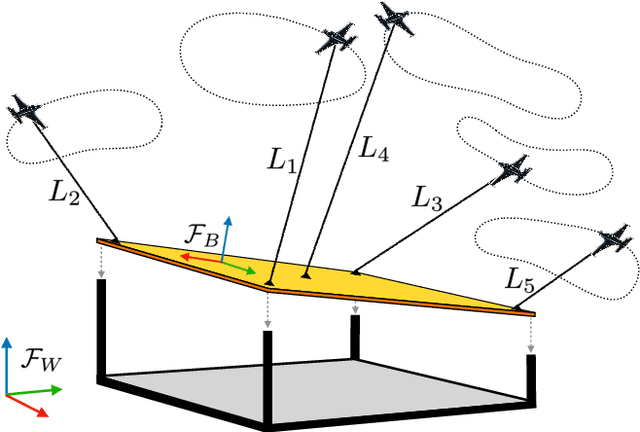

Multirotor UAVs have been typically considered for aerial manipulation, but their scarce endurance prevents long-lasting manipulation tasks. This work demonstrates that the non-stop flights of three or more carriers are compatible with holding a constant pose of a cable-suspended load, thus potentially enabling aerial manipulation with energy-efficient non-stop carriers. It also presents an algorithm for generating the coordinated non-stop trajectories. The proposed method builds upon two pillars: (1)~the choice of $n$ special linearly independent directions of internal forces within the $3n-6$-dimensional nullspace of the grasp matrix of the load, chosen as the edges of a Hamiltonian cycle on the graph that connects the cable attachment points on the load. Adjacent pairs of directions are used to generate $n$ forces evolving on distinct 2D affine subspaces, despite the attachment points being generically in 3D; (2)~the construction of elliptical trajectories within these subspaces by mapping, through appropriate graph coloring, each edge of the Hamiltonian cycle to a periodic coordinate while ensuring that no adjacent coordinates exhibit simultaneous zero derivatives. Combined with conditions for load statics and attachment point positions, these choices ensure that each of the $n$ force trajectories projects onto the corresponding cable constraint sphere with non-zero tangential velocity, enabling perpetual motion of the carriers while the load is still. The theoretical findings are validated through simulations and laboratory experiments with non-stopping multirotor UAVs.
Aerial Robots Carrying Flexible Cables: Dynamic Shape Optimal Control via Spectral Method Model
Mar 26, 2024



In this work, we present a model-based optimal boundary control design for an aerial robotic system composed of a quadrotor carrying a flexible cable. The whole system is modeled by partial differential equations (PDEs) combined with boundary conditions described by ordinary differential equations (ODEs). The proper orthogonal decomposition (POD) method is adopted to project the original infinite-dimensional system on a subspace spanned by orthogonal basis functions. Based on the reduced order model, nonlinear model predictive control (NMPC) is implemented online to realize shape trajectory tracking of the flexible cable in an optimal predictive fashion. The proposed reduced modeling and optimal control paradigms are numerically verified against an accurate high-dimensional FDM-based model in different scenarios and the controller's superior performance is shown compared to an optimally tuned PID controller.
On the Existence of Static Equilibria of a Cable-Suspended Load with Non-stopping Flying Carriers
Feb 29, 2024



Aerial cooperative robotic manipulation of cable-suspended objects has been largely studied as it allows handling large and heavy objects, and cables offer multiple advantages, such as their low weight and cost efficiency. Multirotors have been typically considered, which, however, can be unsuitable for long-lasting manipulation tasks due to their scarce endurance. Hence, this work investigates whether non-stop flights are possible for maintaining constant the pose of cable-suspended objects. First, we show that one or two flying carriers alone cannot perform non-stop flights while maintaining a constant pose of the suspended object. Instead, we demonstrate that \emph{three} flying carriers can achieve this task provided that the orientation of the load at the equilibrium is such that the components of the cable forces that balance the external force (typically gravity) do not belong to the plane of the cable anchoring points on the load. Numerical tests are presented in support of the analytical results.
Survey of Simulators for Aerial Robots
Nov 04, 2023Uncrewed Aerial Vehicle (UAV) research faces challenges with safety, scalability, costs, and ecological impact when conducting hardware testing. High-fidelity simulators offer a vital solution by replicating real-world conditions to enable the development and evaluation of novel perception and control algorithms. However, the large number of available simulators poses a significant challenge for researchers to determine which simulator best suits their specific use-case, based on each simulator's limitations and customization readiness. This paper analyzes existing UAV simulators and decision factors for their selection, aiming to enhance the efficiency and safety of research endeavors.
Modelling, Analysis and Control of OmniMorph:an Omnidirectional Morphing Multi-rotor UAV
May 26, 2023We present the design, modelling, and control of a novel morphing multi-rotor Unmanned Aerial Vehicle (UAV) that we call the OmniMorph. The morphing ability allows the platform to switch between different configurations to achieve the required task. The uni-directional thrust (UDT) configuration can be used for energy-efficient navigation, while fully-actuated (FA) and omnidirectional (OD) configurations can be used for full pose tracking and make the platform assume any orientation while compensating the gravity. The platform is equipped with eight bi-directional propellers that are actively tilted in a synchronized fashion using only one additional degree of actuation.